完善资料让更多小伙伴认识你,还能领取20积分哦, 立即完善>
3天内不再提示

在之前的开发板试用帖子中,我使用Linux开发板来移植LVGL9.1,而LVGL9系版本目前最新更新到9.3(master分支,release版本),在最新版本中加入了3D图形的初步支持(完整支持要继续在后续 ...
【上海晶珩睿莓1开发板试用体验】Home Assistant 物联网温湿度计 本文介绍了上海晶珩睿莓 1 开发板通过 AHT10 传感器实现环境温湿度采集,结合 WiFi 和 MQTT 协议实现数据实时上传至 Home Assistant 平台,实现物联 ...
开发环境: IDE:MounRiver Studio MCU:CH585 5 软件I2C 5.1 具体代码实现 首先实现I2C的协议。 /** * [url=home.php?mod=space&uid=2666770]@Brief[/url] I2C_Delay, I2C总线位延迟,最快400KHz * [url=home. ...
开发环境: IDE:MounRiver Studio MCU:CH585 4 硬件I2C 4.1 具体代码实现 首先看看I2C的初始化。这有两部分。 一部分是I2C的GPIO初始化。 /** * [url=home.php?mod=space&uid=2666770]@Brief[/url] I2C1 I/O配 ...
开发环境: IDE:MounRiver Studio MCU:CH585 1 I2C工作原理 1.1 I2C串行总线概述 I2C总线是PHLIPS公司推出的一种双线式半双工串行总线,是具备多主机系统所需的总线裁决和高低速器件同步功能的高性能串行总线。用 ...
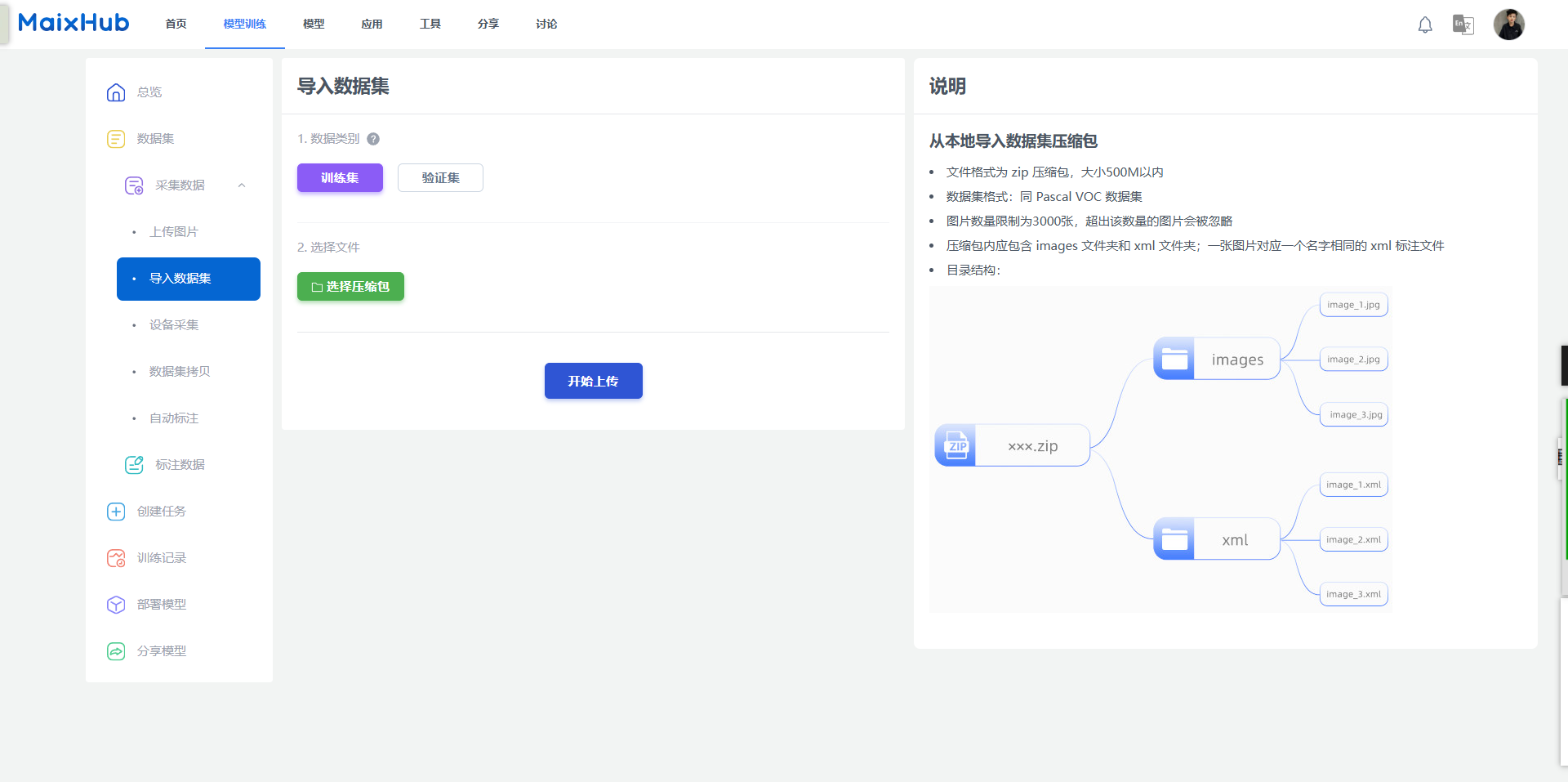
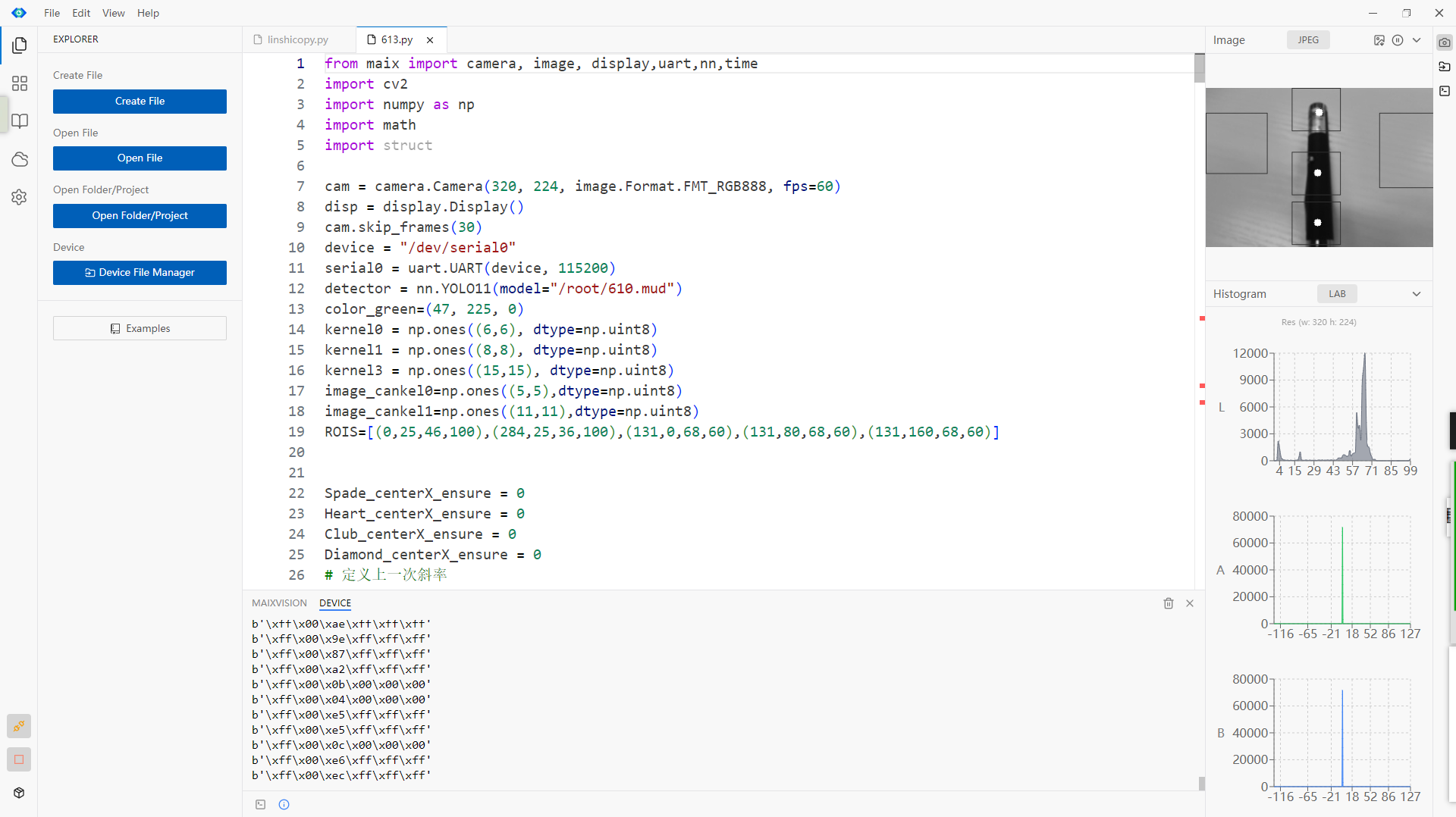
一、引言 首先在此非常感谢电子发烧友论坛给与的试用测评机会,同时也非常感谢 Sipeed矽速科技提供的 设备 ,让我有机会能够去体验这款高性能 AI 视觉处理板--MaixCAM Pro 。 二 、 机器学习YOLO体验 1.在线训练 Sip ...
一、引言 首先在此非常感谢电子发烧友论坛给与的试用测评机会,同时也非常感谢 Sipeed矽速科技提供的 设备 ,让我有机会能够去体验这款高性能 AI 视觉处理板--MaixCAM Pro 。 二 、完成内容介绍 1.小车通过巡线到达 ...
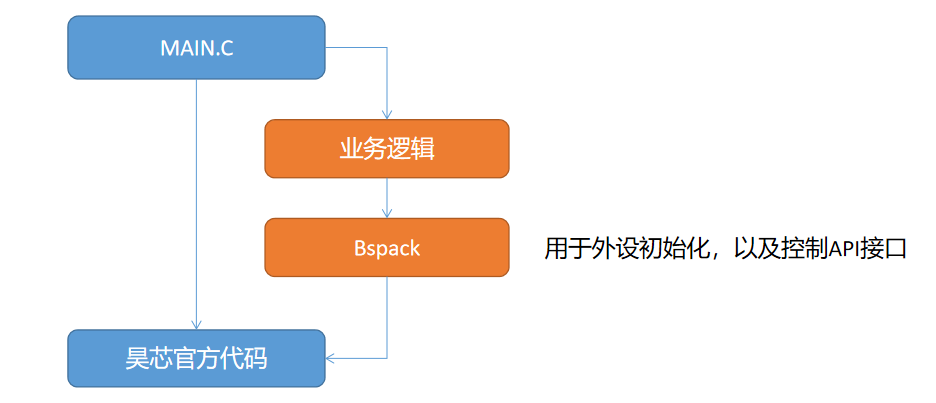
前言 大家好,非常感谢电子发烧友与中科昊芯提供的DSC280025C开发板,这是一款DSP的开发板,基于RISC-V指令架构。 外设调试大纲 这段时间,我仔细的研究了一下IDE直接生成的工程代码。大致了解了官方工程的是框架和 ...

初品STM32H7R3开发套件 正点原子是一家知名品牌,它以技术新、资料全、易于掌握和开发而闻名,此次试用的STM32H7R3开发板则是一款基于STM32H7系列微控制器的高性能开发板,适用于各种高性能计算和复杂图形用户界面的 ...

注意,本文创建了个子镜像用来配置开发环境。实际上并不需要这么麻烦。我这里只是为了方便换版本,并且在容器来开发省的扫尾。具体容器信息看文章结尾。 对于vscode的配置,其他位置都好说。唯独进入docker的时候不 ...




关注我们的微信

下载发烧友APP

电子发烧友观察

版权所有 © 湖南华秋数字科技有限公司
电子发烧友 (电路图) 湘公网安备 43011202000918 号 电信与信息服务业务经营许可证:合字B2-20210191 工商网监
湘ICP备2023018690号
工商网监
湘ICP备2023018690号
 我的试用
我的试用


