PS2遥控手柄
此处使用的是较为低级便宜的PS2遥控手柄,不过可以实现绝大部分的控制基本功能,有想玩更丝滑的无级变速之类的小伙伴可以去买更为高级的手柄~
遥控原理
遥控器端有信号发送装置,接收端具有接收装置,将PS2的接收装置与PYB相连,即可完成接收器与单片机的接线。每当在遥控器端按下一个按键时,接收端即可接收到一个固定的字符串(或数字),代表这个按键,所以通过不同按键对应的数字,我们即可得到这个按键是什么,再对他进行相应的个性化配置即可。
接线
[tr]PS2手柄PYB[/tr]
| VCC | 3V3 |
| GND | GND |
| DAT | X18 |
| CMD | X19 |
| CS | X20 |
| CLK | X21 |
代码
PS2手柄库文件
ps2.py
import pyb
from pyb import Pin
import time
PSB_SELECT = 1
PSB_L3 = 2
PSB_R3 = 3
PSB_START = 4
PSB_PAD_UP = 5
PSB_PAD_RIGHT = 6
PSB_PAD_DOWN = 7
PSB_PAD_LEFT = 8
PSB_L2 = 9
PSB_R2 = 10
PSB_L1 = 11
PSB_R1 = 12
PSB_GREEN = 13
PSB_RED = 14
PSB_BLUE = 15
PSB_PINK = 16
PSB_TRIANGLE = 13
PSB_CIRCLE = 14
PSB_CROSS = 15
PSB_SQUARE = 26
PSS_RX = 5 #x
PSS_RY = 6
PSS_LX = 7
PSS_LY = 8
mask=[
PSB_SELECT,
PSB_L3,
PSB_R3 ,
PSB_START,
PSB_PAD_UP,
PSB_PAD_RIGHT,
PSB_PAD_DOWN,
PSB_PAD_LEFT,
PSB_L2,
PSB_R2,
PSB_L1,
PSB_R1 ,
PSB_GREEN,
PSB_RED,
PSB_BLUE,
PSB_PINK]
comd=[0x01,0x42]
data=[0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00]
class PS2KEY:
#使用定义: PS2KEY('X18','X19','X20','X21')
def __init__(self,_di,_do,_cs,_clk):
self.di=Pin(_di,Pin.IN,Pin.PULL_DOWN)
self.do=Pin(_do,Pin.OUT_PP)
self.cs=Pin(_cs,Pin.OUT_PP)
self.clk=Pin(_clk,Pin.OUT_PP)
self.ps2_init()
self.ps2_red()
def ps2_init(self):
self.clk.value(1)
self.do.value(1)
time.sleep_ms(10)
def ps2_cmd(self,cmd):
global data
data[1]=0
for ref in (1,2,4,8,16,32,64,128):
if ( ref & cmd):
self.do.value(1)
else:
self.do.value(0)
self.clk.value(1)
time.sleep_us(10)
self.clk.value(0)
time.sleep_us(10)
self.clk.value(1)
if(self.di.value()==1):
data[1]=ref|data[1]
def ps2_red(self):
global data
global comd
self.cs.value(0)
self.ps2_cmd(comd[0])
self.ps2_cmd(comd[1])
self.cs.value(1)
if(data[1]==57):
return 0#red light
else:
return 1#not red
def ps2_read(self):
global data
global comd
byte=0
ref=0x01
self.cs.value(0)
self.ps2_cmd(comd[0])
self.ps2_cmd(comd[1])
for byte in (2,3,4,5,6,7,8):
for ref in (1,2,4,8,16,32,64,128):
self.clk.value(1)
self.clk.value(0)
time.sleep_us(10)
self.clk.value(1)
if(self.di.value()==1):
data[byte]= ref|data[byte]
time.sleep_us(10)
self.cs.value(1)
def ps2_clear(self):#ok
global data
for i in range(0,9,1):
data
=0
#获取摇杆电位值(0-255模拟量)
def ps2_andata(self,button):
global data
return data[button]
#获取按键值
def ps2_key(self):
global data
global mask
self.ps2_clear()
self.ps2_read()
handkey=(data[4]<<8)|data[3]
for index in (0,1,2,3,4,5,6,7,8,9,10,11,12,13,14,15):
if (( handkey&(1<<(mask[index]-1)))==0):
return index+2
return 0
指令接收主程序
函数解析
获取按键值
ps=ps2.PS2KEY('X18','X19','X20','X21')
key = ps2_key() # 获取按键值key
获取摇杆值
ps=ps2.PS2KEY('X18','X19','X20','X21')
an_key = ps2_andata(5) # 获取按键值key
主程序
# main.py -- put your code here!
import ps2
while True:
ps=ps2.PS2KEY('X18','X19','X20','X21')
a=ps.ps2_key() #读取手柄键值
if(a==13): #判断按键执行相关灯的开关
pyb.LED(1).on()
elif(a==14):
pyb.LED(2).on()
elif(a==15):
pyb.LED(3).on()
elif(a==16):
pyb.LED(4).on()
elif(a==5):
pyb.LED(1).off()
elif(a==6):
pyb.LED(2).off()
elif(a==7):
pyb.LED(3).off()
elif(a==8):
pyb.LED(4).off()
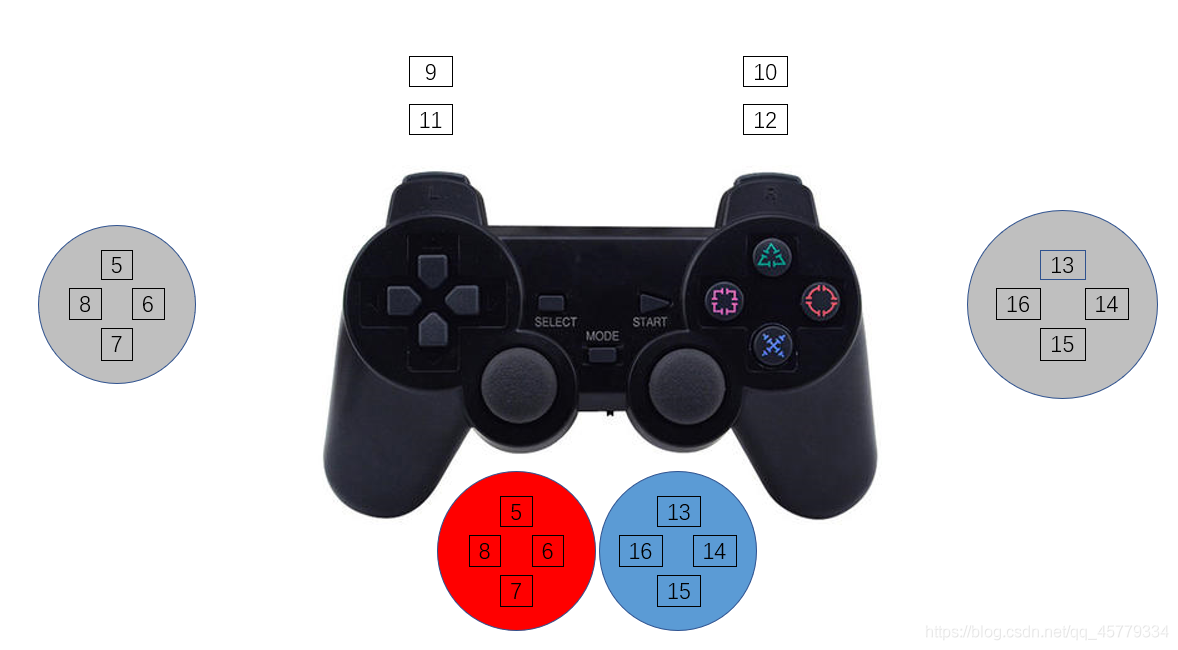
按键对应数据图
博主自己测试了整个按键对应的数字编号,读者可以直接使用~
摇杆值对应的数组详解
我在这里测试了一下各个摇杆值对应数组中的值,发现:

data[5]、data[6]、data[7]、data[8]
- data[8]:左边上下摇杆,中间值为191,向上为128,向下为255
- data[7]:左边左右摇杆,中间值为192 ,向左为128,向右为255
- data[6]:右边上下摇杆,中间值为191 ,向上为128,向下为255
- data[5]:右边左右摇杆,中间值为 192,向左为128,向右为255
PS2遥控手柄
此处使用的是较为低级便宜的PS2遥控手柄,不过可以实现绝大部分的控制基本功能,有想玩更丝滑的无级变速之类的小伙伴可以去买更为高级的手柄~
遥控原理
遥控器端有信号发送装置,接收端具有接收装置,将PS2的接收装置与PYB相连,即可完成接收器与单片机的接线。每当在遥控器端按下一个按键时,接收端即可接收到一个固定的字符串(或数字),代表这个按键,所以通过不同按键对应的数字,我们即可得到这个按键是什么,再对他进行相应的个性化配置即可。
接线
[tr]PS2手柄PYB[/tr]
| VCC | 3V3 |
| GND | GND |
| DAT | X18 |
| CMD | X19 |
| CS | X20 |
| CLK | X21 |
代码
PS2手柄库文件
ps2.py
import pyb
from pyb import Pin
import time
PSB_SELECT = 1
PSB_L3 = 2
PSB_R3 = 3
PSB_START = 4
PSB_PAD_UP = 5
PSB_PAD_RIGHT = 6
PSB_PAD_DOWN = 7
PSB_PAD_LEFT = 8
PSB_L2 = 9
PSB_R2 = 10
PSB_L1 = 11
PSB_R1 = 12
PSB_GREEN = 13
PSB_RED = 14
PSB_BLUE = 15
PSB_PINK = 16
PSB_TRIANGLE = 13
PSB_CIRCLE = 14
PSB_CROSS = 15
PSB_SQUARE = 26
PSS_RX = 5 #x
PSS_RY = 6
PSS_LX = 7
PSS_LY = 8
mask=[
PSB_SELECT,
PSB_L3,
PSB_R3 ,
PSB_START,
PSB_PAD_UP,
PSB_PAD_RIGHT,
PSB_PAD_DOWN,
PSB_PAD_LEFT,
PSB_L2,
PSB_R2,
PSB_L1,
PSB_R1 ,
PSB_GREEN,
PSB_RED,
PSB_BLUE,
PSB_PINK]
comd=[0x01,0x42]
data=[0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00]
class PS2KEY:
#使用定义: PS2KEY('X18','X19','X20','X21')
def __init__(self,_di,_do,_cs,_clk):
self.di=Pin(_di,Pin.IN,Pin.PULL_DOWN)
self.do=Pin(_do,Pin.OUT_PP)
self.cs=Pin(_cs,Pin.OUT_PP)
self.clk=Pin(_clk,Pin.OUT_PP)
self.ps2_init()
self.ps2_red()
def ps2_init(self):
self.clk.value(1)
self.do.value(1)
time.sleep_ms(10)
def ps2_cmd(self,cmd):
global data
data[1]=0
for ref in (1,2,4,8,16,32,64,128):
if ( ref & cmd):
self.do.value(1)
else:
self.do.value(0)
self.clk.value(1)
time.sleep_us(10)
self.clk.value(0)
time.sleep_us(10)
self.clk.value(1)
if(self.di.value()==1):
data[1]=ref|data[1]
def ps2_red(self):
global data
global comd
self.cs.value(0)
self.ps2_cmd(comd[0])
self.ps2_cmd(comd[1])
self.cs.value(1)
if(data[1]==57):
return 0#red light
else:
return 1#not red
def ps2_read(self):
global data
global comd
byte=0
ref=0x01
self.cs.value(0)
self.ps2_cmd(comd[0])
self.ps2_cmd(comd[1])
for byte in (2,3,4,5,6,7,8):
for ref in (1,2,4,8,16,32,64,128):
self.clk.value(1)
self.clk.value(0)
time.sleep_us(10)
self.clk.value(1)
if(self.di.value()==1):
data[byte]= ref|data[byte]
time.sleep_us(10)
self.cs.value(1)
def ps2_clear(self):#ok
global data
for i in range(0,9,1):
data
=0
#获取摇杆电位值(0-255模拟量)
def ps2_andata(self,button):
global data
return data[button]
#获取按键值
def ps2_key(self):
global data
global mask
self.ps2_clear()
self.ps2_read()
handkey=(data[4]<<8)|data[3]
for index in (0,1,2,3,4,5,6,7,8,9,10,11,12,13,14,15):
if (( handkey&(1<<(mask[index]-1)))==0):
return index+2
return 0
指令接收主程序
函数解析
获取按键值
ps=ps2.PS2KEY('X18','X19','X20','X21')
key = ps2_key() # 获取按键值key
获取摇杆值
ps=ps2.PS2KEY('X18','X19','X20','X21')
an_key = ps2_andata(5) # 获取按键值key
主程序
# main.py -- put your code here!
import ps2
while True:
ps=ps2.PS2KEY('X18','X19','X20','X21')
a=ps.ps2_key() #读取手柄键值
if(a==13): #判断按键执行相关灯的开关
pyb.LED(1).on()
elif(a==14):
pyb.LED(2).on()
elif(a==15):
pyb.LED(3).on()
elif(a==16):
pyb.LED(4).on()
elif(a==5):
pyb.LED(1).off()
elif(a==6):
pyb.LED(2).off()
elif(a==7):
pyb.LED(3).off()
elif(a==8):
pyb.LED(4).off()
按键对应数据图
博主自己测试了整个按键对应的数字编号,读者可以直接使用~
摇杆值对应的数组详解
我在这里测试了一下各个摇杆值对应数组中的值,发现:
data[5]、data[6]、data[7]、data[8]
- data[8]:左边上下摇杆,中间值为191,向上为128,向下为255
- data[7]:左边左右摇杆,中间值为192 ,向左为128,向右为255
- data[6]:右边上下摇杆,中间值为191 ,向上为128,向下为255
- data[5]:右边左右摇杆,中间值为 192,向左为128,向右为255

 举报
举报




