超声波测距原理
利用HC-SR04超声波测距模块可以实现比较精确的直线测距,其测距原理图如下:
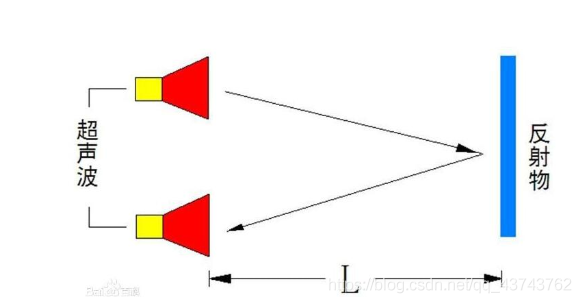
HC-SR04的一端发出超声波,接触到反射物后反射,被另一个端口接收到,所以只要知道发射和接收的时间差,就可以根据声波传播的速率算出HC-SR04和反射物直接的距离。
所以实现超声波测距就需要俩个条件:
发射和接收的时间差
超声波传输的速率
HC-SR04工作原理
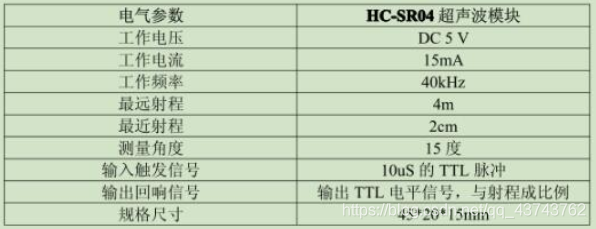
HC-SR04模块的电气参数如示:
HC-SR04模块的实物图如示:
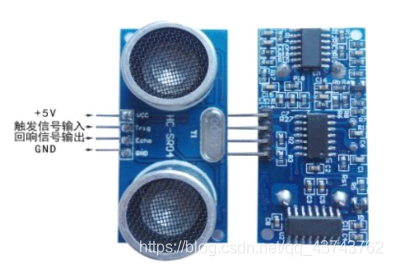
有四个引脚:
Vcc:+5V电源供电
Trig:输入触发信号(可以触发测距)
Echo:传出信号回响(可以传回时间差)
Gnd:接地
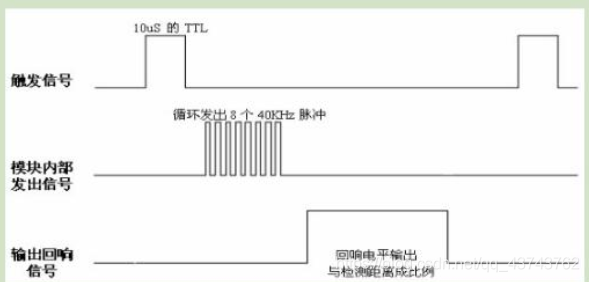
用Trig和Echo引脚实现测距的流程:
1.通过Trig输出一段至少10us的高电平(脉冲),触发一次测距,超声波在传输的过程中Echo一直输出高电平。
2.在Trig脉冲输出后,立即检测Echo引脚的电平,测出Echo高电平持续的时间t,t就是超声波在所测距离一个来回所需时间。
测距时序图如示:
STM32实现驱动
利用STM32驱动HC-SR04需要做好几个关键点:
引脚的配置
时序的控制
时间差的测量
下面来分开实现几个关键点
1.引脚的配置
HC-SR04四个引脚,Vcc和Gnd直接接在开发板的电源上即可,主要是Trig和Echo引脚的配置,我选择了PB1连接Trig引脚、PB2连接Echo引脚。
因为要控制Trig输出电平,所以PB1引脚模式是推挽输出GPIO_Mode_Out_PP
Echo要检测高电平持续的时间,所以PB2引脚模式是浮空输入GPIO_Mode_IN_FLOATING
相关的配置代码如下:
void SR04_GPIO_Init( void )
{
GPIO_InitTypeDef GPIO_InitStruct;
RCC_APB2PeriphClockCmd( Trig_Clock |Echo_Clock , ENABLE );
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStruct.GPIO_Pin = Trig_PIN;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(Trig_PORT, &GPIO_InitStruct);
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_InitStruct.GPIO_Pin = Echo_PIN;
GPIO_Init(Echo_PORT, &GPIO_InitStruct);
}
2.时序控制
HC-SR04的时序是:先来一段10us的Trig高电平,接着接收一段Echo的高电平,伪代码如下:
#define Trig_H GPIO_SetBits(GPIOB, GPIO_Pin_1)
#define Trig_L GPIO_ResetBits(GPIOB, GPIO_Pin_1)
/* Trig给一个至少10us的高电平,超声波进行一次测距 */
Trig_H;
Delay_us( 10 );
Trig_L;
/* 等待Echo高电平 */
*/
3.时间差测量
这个是最重要的一步,要测量Echo高电平持续的时间,因为光传播的速率是340m/s,而测距的范围大多是cm级别,所以相应Echo高电平持续的时间也就是us级别的。
所以,测量时间差的条件就比较苛刻,我是利用SysTick(系统计数器)的原理实现计时的。SysTick计数器原理是对通过SysTick_Config()函数配置每俩次中断之间的节拍数,也就是俩次中断之间的机器周期,我大概算出了,测出0.1cm距离的Echo高电平时间约为6um,而系统时钟的频率是72MHz,所以配置每俩次中断之间的节拍为432的时候,进入一次中断就代表0.1cm的距离,所以只需要记录进入中断的次数就可以算出距离。通过一个全局变量在中断函数中自增来记录中断次数。SysTick_Config函数源代码如下:
static __INLINE uint32_t SysTick_Config(uint32_t ticks)
{
/* 判断ticks 是否超出装填值和重装值的最大值 */
if (ticks 》 SysTick_LOAD_RELOAD_Msk) return (1);
/* 配置 装载寄存器 */
SysTick-》LOAD = (ticks & SysTick_LOAD_RELOAD_Msk) - 1;
/* 配置 内核中断的优先级,也是在NVIC中 */
NVIC_SetPriority (SysTick_IRQn, (1《《__NVIC_PRIO_BITS) - 1);
/* 加载计数器的值 */
/* SysTick-》VAL是当前数值寄存器的值 */
SysTick-》VAL = 0;
/* CTRL是SysTick控制及状态寄存器:
CLKSOURCE:位段2 时钟源选择,0=APB/8;1=APB APB即72MHz
TICKINT: 位段1 当置为1时,计数器递减到0时会产生中断请求;当置为0时无动作
ENABLE: 位段0 使能位,可以启动SysTick定时器*/
SysTick-》CTRL = SysTick_CTRL_CLKSOURCE_Msk |
SysTick_CTRL_TICKINT_Msk |
SysTick_CTRL_ENABLE_Msk;
return (0);
}
注意:SysTick_Config()函数执行完就开启了中断,所以必须在Echo为低电平后及时关闭中断,并且将记录中断的变量清零。
中断函数如示:
/* 用extern和volatile关键字修饰的 全局变量n */
extern volatile uint32_t n;
void SysTick_Handler(void)
{
n++;
}
关闭中断及清零n的代码如下:
/* 本来的使能位取反 */
SysTick-》CTRL &= ~SysTick_CTRL_ENABLE_Msk;
SysTick-》CTRL寄存器的0位控制着中断的使能,具体情况在之前SysTick的博客中已做详细说明。
4.如何将距离测出来
我在main函数中实现了距离的测量,并且通过串口打印函数将距离传到上位机,具体代码如示:
int main(void)
{
int i=1,q;
float p;
/* HC-SR04模块引脚初始化 */
SR04_GPIO_Init();
/* 串口相关配置 */
GQ_UART_Config();
/* 打印调试信息 */
printf(“慢漫的测距实验n ”);
while( 1 )
{
/* 每0.5s测一次距离 */
Delay_ms( 500 );
/* Trig给一个至少10us的高电平,超声波进行一次测距 */
Trig_H;
Delay_us( 10 );
Trig_L;
/* 等待Echo高电平 */
while( Echo_Value != 1 );
/* 打开中断,对Echo高电平时间计时 */
/* 配置计数器的装载值是72*6=432,即一次中断6um,正好是超声波的0.1cm,所以中断次数n对应着n*0.1cm */
/* SysTick_Config()中已经使能计数器了,所以无需再开启 */
SysTick_Config( 432 );
/* 等待直到Echo为低电平 */
while(Echo_Value == 1);
/* 关闭中断,通过参数n来取得距离参数 */
/* 本来的使能位取反 */
SysTick-》CTRL &= ~SysTick_CTRL_ENABLE_Msk;
/* p、q分别是距离的整数部分和小数部分 */
p=n/10;
q=n%10;
/* 打印距离信息 */
/* p-50时经过调试的,因为测量的距离和诸多因素有关,这个操作减小了误差 */
printf(“第%d次测量为:%.0f.%dcmn”,i,p-50,q);
i++;
/* 清零中断记录变量n */
n=0;
}
}
超声波测距原理
利用HC-SR04超声波测距模块可以实现比较精确的直线测距,其测距原理图如下:
HC-SR04的一端发出超声波,接触到反射物后反射,被另一个端口接收到,所以只要知道发射和接收的时间差,就可以根据声波传播的速率算出HC-SR04和反射物直接的距离。
所以实现超声波测距就需要俩个条件:
发射和接收的时间差
超声波传输的速率
HC-SR04工作原理
HC-SR04模块的电气参数如示:
HC-SR04模块的实物图如示:
有四个引脚:
Vcc:+5V电源供电
Trig:输入触发信号(可以触发测距)
Echo:传出信号回响(可以传回时间差)
Gnd:接地
用Trig和Echo引脚实现测距的流程:
1.通过Trig输出一段至少10us的高电平(脉冲),触发一次测距,超声波在传输的过程中Echo一直输出高电平。
2.在Trig脉冲输出后,立即检测Echo引脚的电平,测出Echo高电平持续的时间t,t就是超声波在所测距离一个来回所需时间。
测距时序图如示:
STM32实现驱动
利用STM32驱动HC-SR04需要做好几个关键点:
引脚的配置
时序的控制
时间差的测量
下面来分开实现几个关键点
1.引脚的配置
HC-SR04四个引脚,Vcc和Gnd直接接在开发板的电源上即可,主要是Trig和Echo引脚的配置,我选择了PB1连接Trig引脚、PB2连接Echo引脚。
因为要控制Trig输出电平,所以PB1引脚模式是推挽输出GPIO_Mode_Out_PP
Echo要检测高电平持续的时间,所以PB2引脚模式是浮空输入GPIO_Mode_IN_FLOATING
相关的配置代码如下:
void SR04_GPIO_Init( void )
{
GPIO_InitTypeDef GPIO_InitStruct;
RCC_APB2PeriphClockCmd( Trig_Clock |Echo_Clock , ENABLE );
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStruct.GPIO_Pin = Trig_PIN;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(Trig_PORT, &GPIO_InitStruct);
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_InitStruct.GPIO_Pin = Echo_PIN;
GPIO_Init(Echo_PORT, &GPIO_InitStruct);
}
2.时序控制
HC-SR04的时序是:先来一段10us的Trig高电平,接着接收一段Echo的高电平,伪代码如下:
#define Trig_H GPIO_SetBits(GPIOB, GPIO_Pin_1)
#define Trig_L GPIO_ResetBits(GPIOB, GPIO_Pin_1)
/* Trig给一个至少10us的高电平,超声波进行一次测距 */
Trig_H;
Delay_us( 10 );
Trig_L;
/* 等待Echo高电平 */
*/
3.时间差测量
这个是最重要的一步,要测量Echo高电平持续的时间,因为光传播的速率是340m/s,而测距的范围大多是cm级别,所以相应Echo高电平持续的时间也就是us级别的。
所以,测量时间差的条件就比较苛刻,我是利用SysTick(系统计数器)的原理实现计时的。SysTick计数器原理是对通过SysTick_Config()函数配置每俩次中断之间的节拍数,也就是俩次中断之间的机器周期,我大概算出了,测出0.1cm距离的Echo高电平时间约为6um,而系统时钟的频率是72MHz,所以配置每俩次中断之间的节拍为432的时候,进入一次中断就代表0.1cm的距离,所以只需要记录进入中断的次数就可以算出距离。通过一个全局变量在中断函数中自增来记录中断次数。SysTick_Config函数源代码如下:
static __INLINE uint32_t SysTick_Config(uint32_t ticks)
{
/* 判断ticks 是否超出装填值和重装值的最大值 */
if (ticks 》 SysTick_LOAD_RELOAD_Msk) return (1);
/* 配置 装载寄存器 */
SysTick-》LOAD = (ticks & SysTick_LOAD_RELOAD_Msk) - 1;
/* 配置 内核中断的优先级,也是在NVIC中 */
NVIC_SetPriority (SysTick_IRQn, (1《《__NVIC_PRIO_BITS) - 1);
/* 加载计数器的值 */
/* SysTick-》VAL是当前数值寄存器的值 */
SysTick-》VAL = 0;
/* CTRL是SysTick控制及状态寄存器:
CLKSOURCE:位段2 时钟源选择,0=APB/8;1=APB APB即72MHz
TICKINT: 位段1 当置为1时,计数器递减到0时会产生中断请求;当置为0时无动作
ENABLE: 位段0 使能位,可以启动SysTick定时器*/
SysTick-》CTRL = SysTick_CTRL_CLKSOURCE_Msk |
SysTick_CTRL_TICKINT_Msk |
SysTick_CTRL_ENABLE_Msk;
return (0);
}
注意:SysTick_Config()函数执行完就开启了中断,所以必须在Echo为低电平后及时关闭中断,并且将记录中断的变量清零。
中断函数如示:
/* 用extern和volatile关键字修饰的 全局变量n */
extern volatile uint32_t n;
void SysTick_Handler(void)
{
n++;
}
关闭中断及清零n的代码如下:
/* 本来的使能位取反 */
SysTick-》CTRL &= ~SysTick_CTRL_ENABLE_Msk;
SysTick-》CTRL寄存器的0位控制着中断的使能,具体情况在之前SysTick的博客中已做详细说明。
4.如何将距离测出来
我在main函数中实现了距离的测量,并且通过串口打印函数将距离传到上位机,具体代码如示:
int main(void)
{
int i=1,q;
float p;
/* HC-SR04模块引脚初始化 */
SR04_GPIO_Init();
/* 串口相关配置 */
GQ_UART_Config();
/* 打印调试信息 */
printf(“慢漫的测距实验n ”);
while( 1 )
{
/* 每0.5s测一次距离 */
Delay_ms( 500 );
/* Trig给一个至少10us的高电平,超声波进行一次测距 */
Trig_H;
Delay_us( 10 );
Trig_L;
/* 等待Echo高电平 */
while( Echo_Value != 1 );
/* 打开中断,对Echo高电平时间计时 */
/* 配置计数器的装载值是72*6=432,即一次中断6um,正好是超声波的0.1cm,所以中断次数n对应着n*0.1cm */
/* SysTick_Config()中已经使能计数器了,所以无需再开启 */
SysTick_Config( 432 );
/* 等待直到Echo为低电平 */
while(Echo_Value == 1);
/* 关闭中断,通过参数n来取得距离参数 */
/* 本来的使能位取反 */
SysTick-》CTRL &= ~SysTick_CTRL_ENABLE_Msk;
/* p、q分别是距离的整数部分和小数部分 */
p=n/10;
q=n%10;
/* 打印距离信息 */
/* p-50时经过调试的,因为测量的距离和诸多因素有关,这个操作减小了误差 */
printf(“第%d次测量为:%.0f.%dcmn”,i,p-50,q);
i++;
/* 清零中断记录变量n */
n=0;
}
}

 举报
举报




