深圳市航顺芯片技术研发有限公司
登录
直播中
李玲
7年用户
1230经验值
私信
关注
[问答]
请问一下怎样去设计一种基于stm32的蓝牙智能小车?
开启该帖子的消息推送
STM32
智能小车
怎样去设计一种基于
STM32
的蓝牙智能小车的硬件
电路
?
怎样去设计一种基于stm32的蓝牙智能小车的软件部分?
回帖
(1)
臧超楠
2021-7-26 14:33:54
前言:
本文描述了一个由STM32微处理器、步进电机、蓝牙,L298N等模块构成的。该系统采用STM32微处理器为核心,在MDK环境下进行编程,通知控制L298N模块IN1~IN4引脚的高低电平进而控制电机的转动方向,使小车产生不同的转动模式。控制小车的转动模式通过蓝牙模块来实现,利用手机蓝牙助手和蓝牙模块相通,进而控制小车的各种运转模式。
整体框架:
下面的图把核心连接部分都画出来了(其他部分按要求接就可以了,Vcc接电源,GND接地即可),图画的有点丑,希望大家不要介意呀
硬件设计:
使用微控制器为STM32F103RC,其芯片引脚如图所示
芯片上所连接的部分:
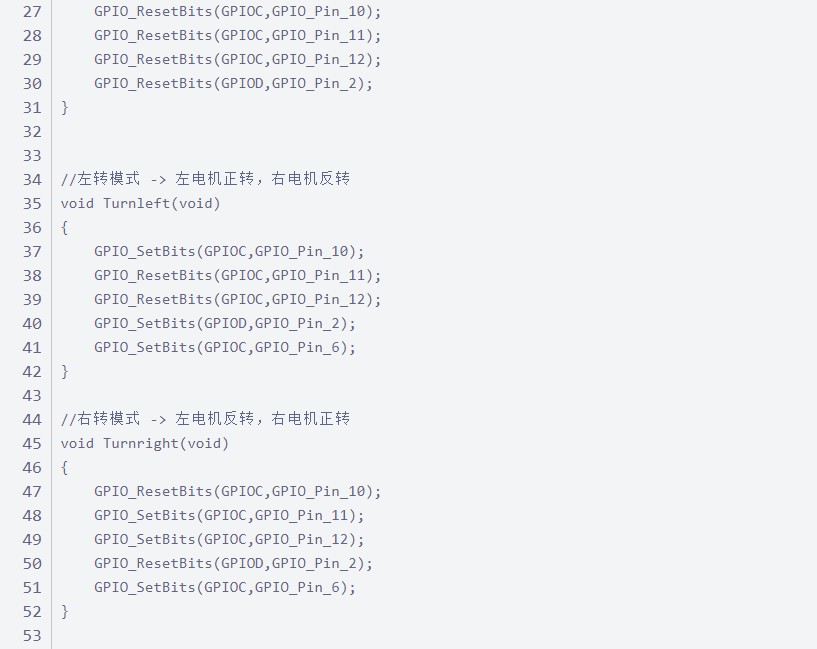
PC10 -》 IN1; PC11 -》 IN2; PC12 -》 IN3; PD2 -》 IN4; 这里芯片上的GPIO口连接是随机的,可以根据自己的方便选择。不过这里要注意的是,IN1和IN2是控制左电机的,IN3和IN4是控制右电机。因为这里我用来驱动电机的是L298N。接线的话左电机接输出A端口,每个孔接一根线,如果要驱动两个左电机的话,也是一样接法,每个孔接一根电机线。右电机接输出B 。
这里要注意的是驱动小车转动需要接外接电源,也就是图片上的12V供电部分。外接电源正极接到12v供电口上,负极接到供电GND上,还有要注意的一点就是还要将开发板上的地接到供电GND上,保证电源和开发板共地。
L298N逻辑电平表
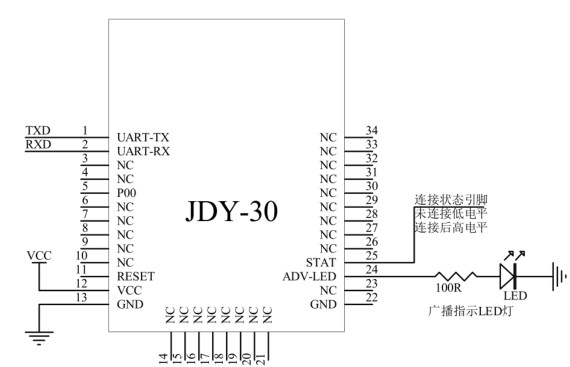
2. JDY 30蓝牙模块
JDY-30 透传模块是基于蓝牙 2.1 协议标准,工作频段为 2.4GHZ 范围,具有信号强、数据传输快、性能稳定等特性。支持蓝牙 SPP 串口协议,内置 PCB 天线,支持 UART 接口,蓝牙 Class 2,数据传输比 BLE 蓝牙快、可达到几十 K 每秒以上的速率。如图3.2所示。
引脚功能说明
1 、 UART-TX 串口输出,接开发板上的UART-Rx,电平为 TTL 电平
2 、 UART-RX 串口输入,接开发板上的UART-Tx,电平为 TTL 电平
3 、 VCC 3.3V 电源
4 、 GND 电源地
Android蓝牙助手已经包含到代码代码里了,直接下载即可。使用手机APP蓝牙连接JDY–30蓝牙模块。
这里的蓝牙助手使用方法要情调一下,可能有些同学不太会,点击右上角的连接按钮,先让手机连上蓝牙模块,一般连上了蓝牙模块上的灯都不会闪烁。以此判断有没有连接上。接着就是编辑键盘的小车的运动方式了,按照下面的来设置就可以了。这里的数字是我代码设置好的,可以按照自己的要求填写。
软件设计:
软件流程图:
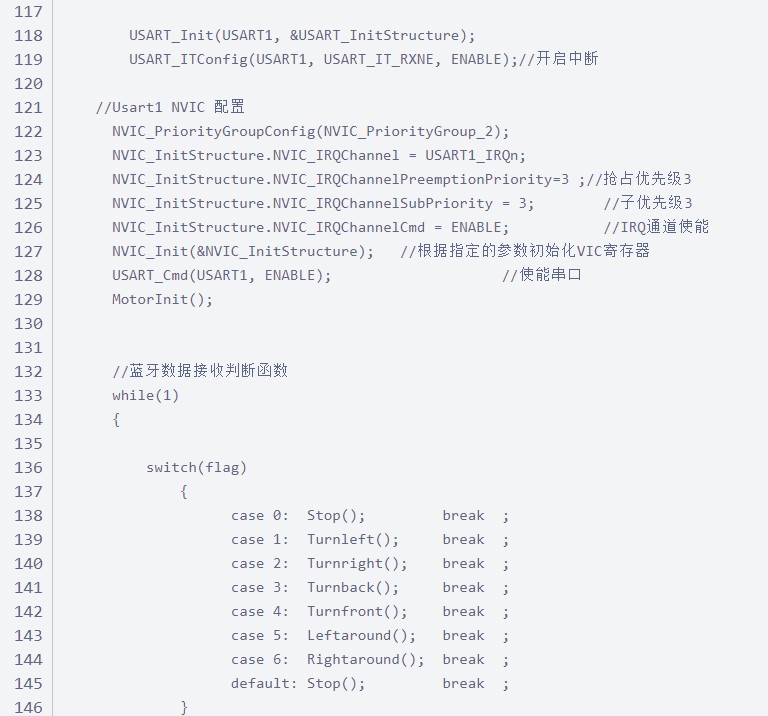
首先对前进,后退,左转,右转,停止进行宏定义,单片机接收到蓝牙串口的相应指令,然后在if语句中进行比较,如果有相对应的,触发相对应的宏定义。流程图如图所示。在串口USART1中接收到的数据进行比较,暂停、前进、后退、左转、右转、原地左转,原地右转。启动字符为 “0”,“1”,“2”,“3”,“4”,“5”,“6”。
代码部分:
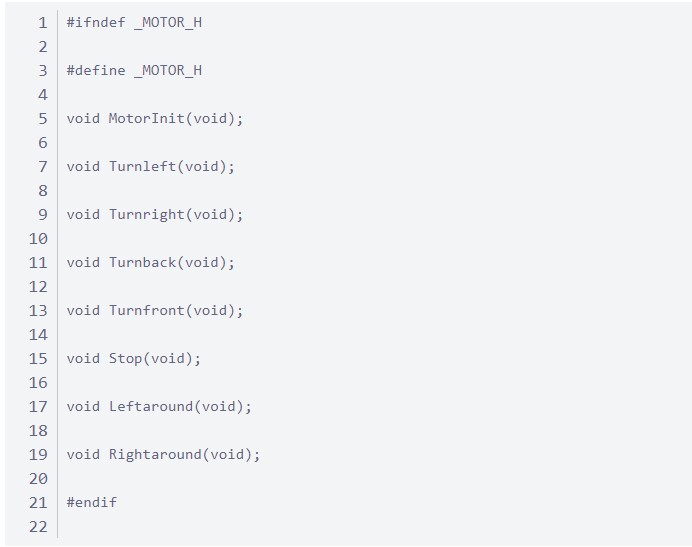
电机驱动代码
1.motor.h
2. motor.c
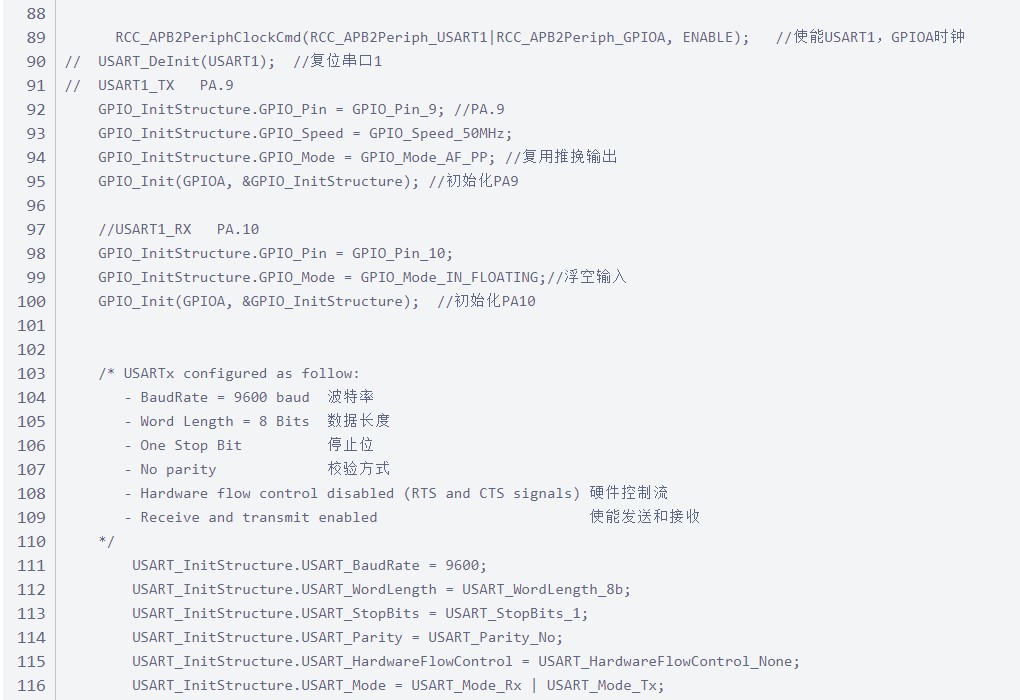
3. main函数
以上就是蓝牙智能小车的全部部分了。
前言:
本文描述了一个由STM32微处理器、步进电机、蓝牙,L298N等模块构成的。该系统采用STM32微处理器为核心,在MDK环境下进行编程,通知控制L298N模块IN1~IN4引脚的高低电平进而控制电机的转动方向,使小车产生不同的转动模式。控制小车的转动模式通过蓝牙模块来实现,利用手机蓝牙助手和蓝牙模块相通,进而控制小车的各种运转模式。
整体框架:
下面的图把核心连接部分都画出来了(其他部分按要求接就可以了,Vcc接电源,GND接地即可),图画的有点丑,希望大家不要介意呀
硬件设计:
使用微控制器为STM32F103RC,其芯片引脚如图所示
芯片上所连接的部分:
PC10 -》 IN1; PC11 -》 IN2; PC12 -》 IN3; PD2 -》 IN4; 这里芯片上的GPIO口连接是随机的,可以根据自己的方便选择。不过这里要注意的是,IN1和IN2是控制左电机的,IN3和IN4是控制右电机。因为这里我用来驱动电机的是L298N。接线的话左电机接输出A端口,每个孔接一根线,如果要驱动两个左电机的话,也是一样接法,每个孔接一根电机线。右电机接输出B 。
这里要注意的是驱动小车转动需要接外接电源,也就是图片上的12V供电部分。外接电源正极接到12v供电口上,负极接到供电GND上,还有要注意的一点就是还要将开发板上的地接到供电GND上,保证电源和开发板共地。
L298N逻辑电平表
2. JDY 30蓝牙模块
JDY-30 透传模块是基于蓝牙 2.1 协议标准,工作频段为 2.4GHZ 范围,具有信号强、数据传输快、性能稳定等特性。支持蓝牙 SPP 串口协议,内置 PCB 天线,支持 UART 接口,蓝牙 Class 2,数据传输比 BLE 蓝牙快、可达到几十 K 每秒以上的速率。如图3.2所示。
引脚功能说明
1 、 UART-TX 串口输出,接开发板上的UART-Rx,电平为 TTL 电平
2 、 UART-RX 串口输入,接开发板上的UART-Tx,电平为 TTL 电平
3 、 VCC 3.3V 电源
4 、 GND 电源地
Android蓝牙助手已经包含到代码代码里了,直接下载即可。使用手机APP蓝牙连接JDY–30蓝牙模块。
这里的蓝牙助手使用方法要情调一下,可能有些同学不太会,点击右上角的连接按钮,先让手机连上蓝牙模块,一般连上了蓝牙模块上的灯都不会闪烁。以此判断有没有连接上。接着就是编辑键盘的小车的运动方式了,按照下面的来设置就可以了。这里的数字是我代码设置好的,可以按照自己的要求填写。
软件设计:
软件流程图:
首先对前进,后退,左转,右转,停止进行宏定义,单片机接收到蓝牙串口的相应指令,然后在if语句中进行比较,如果有相对应的,触发相对应的宏定义。流程图如图所示。在串口USART1中接收到的数据进行比较,暂停、前进、后退、左转、右转、原地左转,原地右转。启动字符为 “0”,“1”,“2”,“3”,“4”,“5”,“6”。
代码部分:
电机驱动代码
1.motor.h
2. motor.c
3. main函数
以上就是蓝牙智能小车的全部部分了。
举报
更多回帖
rotate(-90deg);
回复
相关问答
STM32
智能小车
怎样
去
设计
一种
基于
STM32
的
智能
小车
2021-10-11
1271
怎样
去
设计
一种
基于
STM32
F103芯片的
智能
小车
呢
2021-11-18
1462
怎样
去
设计
一种
基于Arduino
小车
蓝牙
模块的APP
2021-08-18
2315
怎样
去
开发
一种
基于树莓派与
STM32
系统板的
智能
小车
2021-10-09
1318
请问
一下
怎样
去
设计
一种
基于
stm32
f103的数字示波器呢
2021-11-12
1218
怎样
去
设计
一种
基于
STM32
的
智能
循迹
小车
2021-10-19
859
怎样
去
制作
一种
基于
STM32
的
蓝牙
小车
2021-09-29
701
如何
去
实现
一种
基于
STM32
的
蓝牙
小车
设计
2021-09-26
1805
如何
去
实现
一种
基于
stm32
的
智能
小车
设计
2021-09-29
754
怎样
去
设计
一种
基于Arduino Uno单片机的
智能
小车
呢
2022-02-21
914
发帖
登录/注册
20万+
工程师都在用,
免费
PCB检查工具
无需安装、支持浏览器和手机在线查看、实时共享
查看
点击登录
登录更多精彩功能!
首页
论坛版块
小组
免费开发板试用
ebook
直播
搜索
登录
×
20
完善资料,
赚取积分












 举报
举报




