此次发帖描述飞凌嵌入式的OK153-S开发板两路RS485通信测试。
通信测试为使用开发板上的两个RS485结构对接
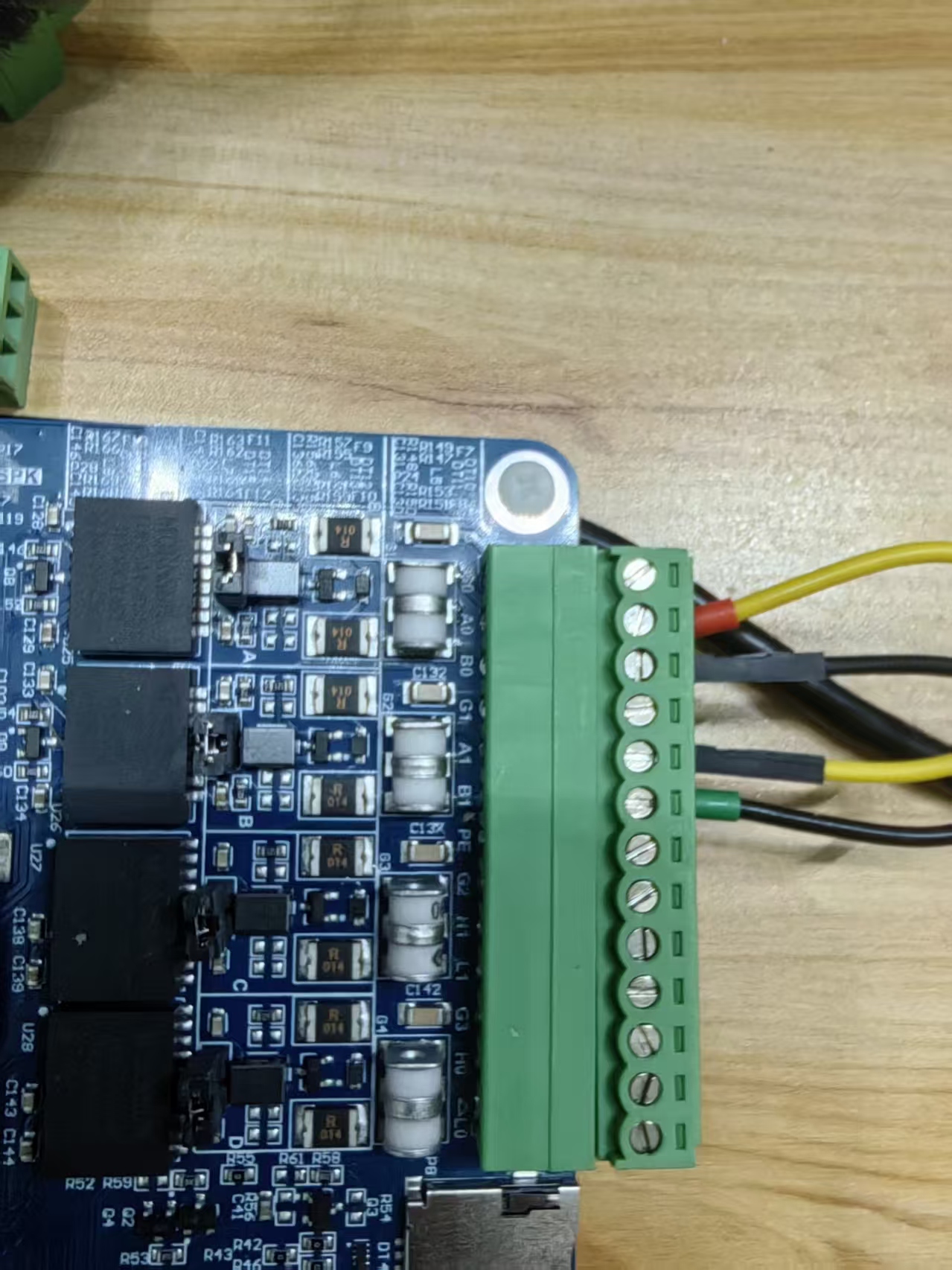
其中一个RS485只负责发送数据,另一个RS485负责接收数据,并将接收的数据原路发送回去。
查看原理图:
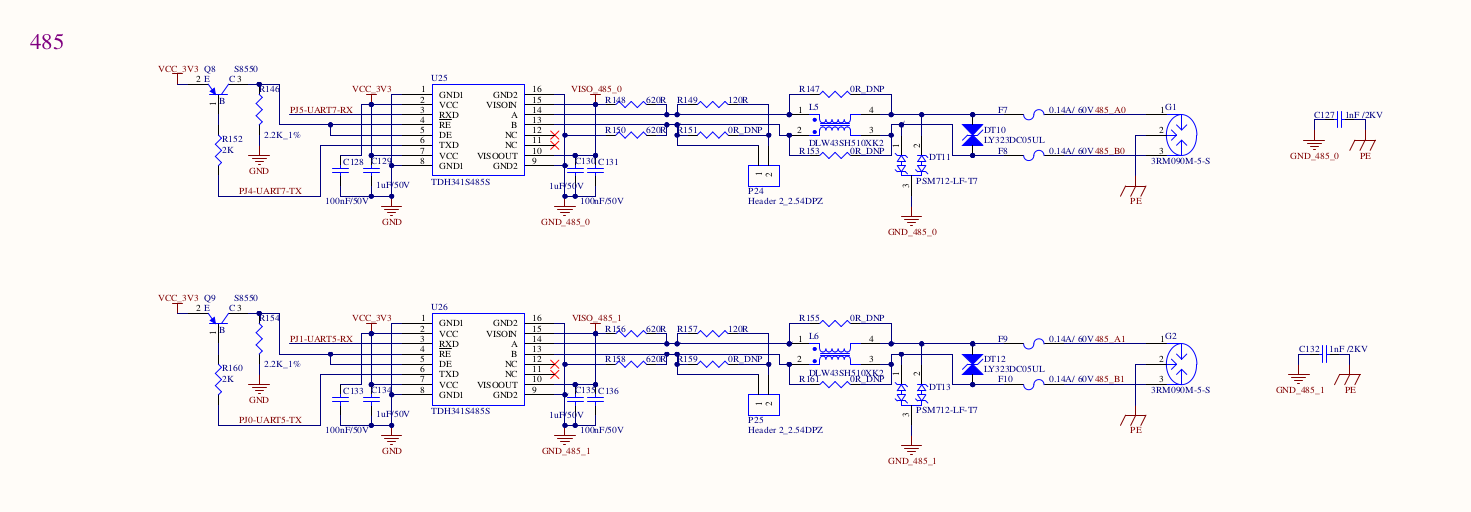
RS485_0 由 uart7导出
RS485_1 由 uart5导出
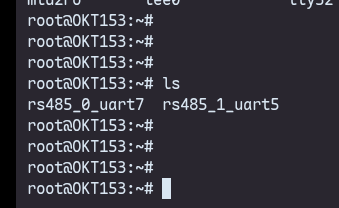
编写两个程序分别打开uart5和uart7,其中uart7导出的RS485_0主动每秒发送数据。uart5导出的RS485_1接收数据,并将接收到的数据发送给RS485_0。
生成的程序如下:
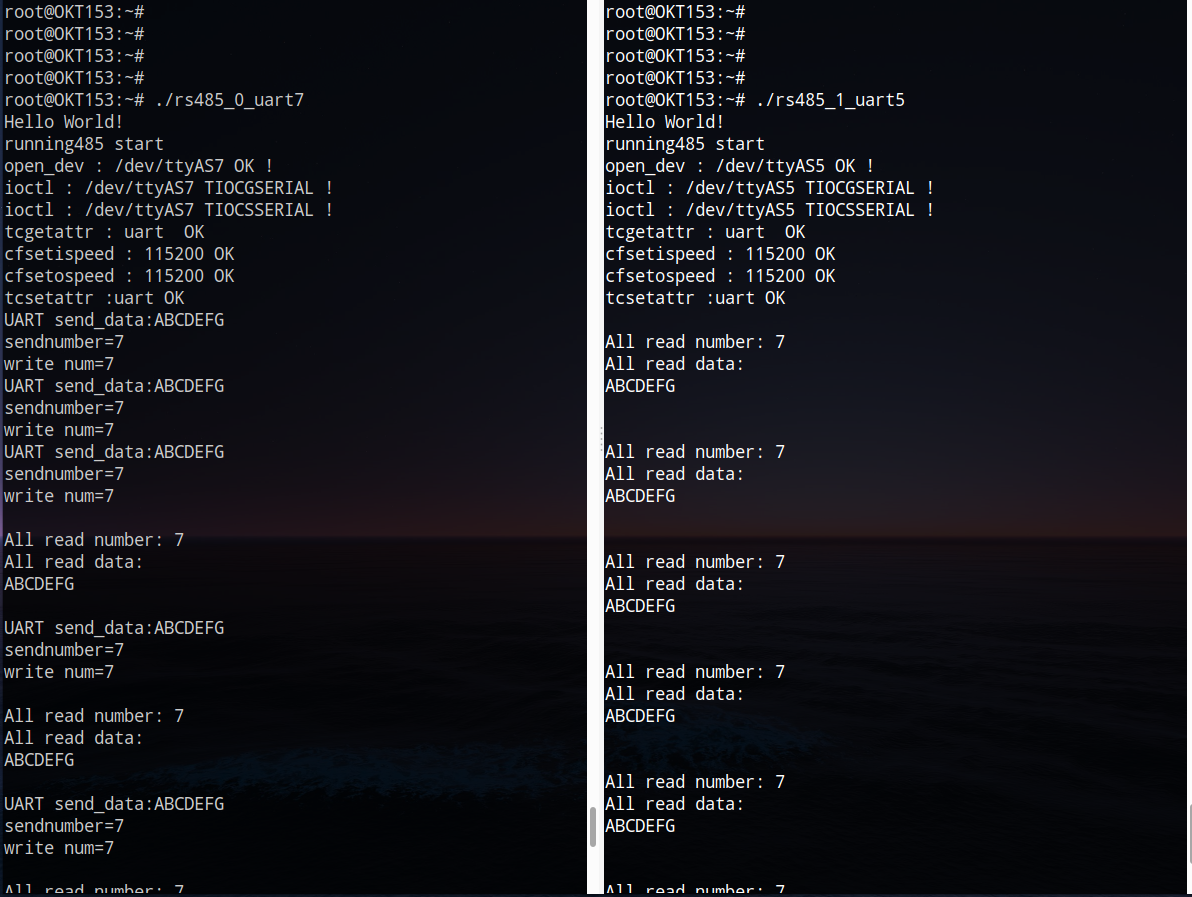
运行结果如下:
下面附上RS485读写代码:
头文件:
#ifndef CLASS_UART_H
#define CLASS_UART_H
#include <iostream>
#include <cstddef>
#include <termios.h>
#include <fcntl.h>
#include <sys/ioctl.h>
#include <linux/serial.h>
#include <wchar.h>
#include <unistd.h>
#include <cstring>
#include <mutex>
#include <sys/epoll.h>
typedef int(*CallBackFunc_ReadData)(char*,int);
using namespace std;
static std::mutex mtx;
class CLASS_UART
{
public:
static CLASS_UART* getClassHandle()
{
mtx.lock();
if(handle == nullptr)
{
handle = new CLASS_UART();
mtx.unlock();
return handle;
}
else
{
mtx.unlock();
return handle;
}
}
~CLASS_UART();
void registerCallBackFunc(CallBackFunc_ReadData func){
func_readdata = func;
}
void stop_thread(){
runUart = -1;
th_work = -1;
}
int set_dev_property(const char* dev);
void run_thread();
int send_data(char* data,int size);
private:
CLASS_UART();
static CLASS_UART* handle;
CallBackFunc_ReadData func_readdata;
char* onceBuffer;
char* allreadBuffer;
char* sendBuffer;
int uartFD,th_work,runUart;
int allreadnumber,sendnumber;
int fdEp;
int eventCount = 0;
int open_dev(const char* dev);
};
#endif
cpp实现文件:
#include "class_device_uart.h"
#include <thread>
#define MAX_EVENTS 10
CLASS_UART* CLASS_UART::handle = nullptr;
CLASS_UART::CLASS_UART() {
th_work = 1;
runUart = -1;
allreadnumber = 0;
fdEp = -1;
uartFD = -1;
sendnumber = 0;
onceBuffer = new char[1024];
for (int r = 0; r < 1024; ++r) {
onceBuffer[r] = '\0';
}
allreadBuffer = new char[8192];
for (int r = 0; r < 8192; ++r) {
allreadBuffer[r] = '\0';
}
sendBuffer = new char[8192];
for (int r = 0; r < 8192; ++r) {
sendBuffer[r] = '\0';
}
}
CLASS_UART::~CLASS_UART(){
th_work = -1;
runUart = -1;
allreadnumber = 0;
sendnumber = 0;
close(uartFD);
close(fdEp);
delete[] onceBuffer;
onceBuffer = nullptr;
delete[] allreadBuffer;
allreadBuffer = nullptr;
delete[] sendBuffer;
sendBuffer = nullptr;
}
int CLASS_UART::open_dev(const char *dev){
uartFD = open(dev, O_RDWR | O_NOCTTY | O_NDELAY);
if (uartFD == -1)
{
cout<<"open_dev : "<<dev<<" faild !"<<endl;
return -1;
}
else {
cout<<"open_dev : "<<dev<<" OK !"<<endl;
struct serial_struct serial;
int ret = ioctl(uartFD, TIOCGSERIAL, &serial);
if (ret != 0) {
close(uartFD);
cout<<"error : "<<dev<<" TIOCGSERIAL !"<<endl;
return -2;
}
cout<<"ioctl : "<<dev<<" TIOCGSERIAL !"<<endl;
serial.xmit_fifo_size = 8192;
ret = ioctl(uartFD, TIOCSSERIAL, &serial);
if(ret != 0) {
close(uartFD);
cout<<"error : "<<dev<<" TIOCSSERIAL !"<<endl;
return -8192;
}
cout<<"ioctl : "<<dev<<" TIOCSSERIAL !"<<endl;
}
fdEp = -1;
fdEp = epoll_create(MAX_EVENTS);
epoll_event eve;
eve.data.fd = uartFD;
eve.events = EPOLLIN ;
func_readdata = nullptr;
int ret = epoll_ctl(fdEp, EPOLL_CTL_ADD, uartFD, &eve);
if(ret == -1) {
close(uartFD);
cout<<"epoll_ctl ERROR:EPOLL_CTL_ADD"<<std::endl<<std::flush;
fdEp = -1;
}
else{
runUart = 1;
return 1;
}
return -1;
}
int CLASS_UART::set_dev_property(const char* dev ){
int speed=115200;
if(open_dev(dev) < 0){
return -1;
}
struct termios options;
if(tcgetattr(uartFD, &options) != 0){
std::cout<<"tcgetattr :uart ERROR"<<std::endl;
close(uartFD);
return -1;
}
else{
std::cout<<"tcgetattr : uart OK"<<std::endl;
}
if(cfsetispeed(&options, B115200) == 0){
std::cout<<"cfsetispeed : "<<speed<<" OK"<<std::endl;
}
else{
std::cout<<"cfsetispeed : "<<speed<<" ERROR"<<std::endl;
close(uartFD);
return -1;
}
if(cfsetospeed(&options, B115200) == 0){
std::cout<<"cfsetospeed : "<<speed<<" OK"<<std::endl;
}
else{
std::cout<<"cfsetospeed : "<<speed<<" ERROR"<<std::endl;
close(uartFD);
return -1;
}
options.c_cflag |= (CLOCAL | CREAD);
cfmakeraw(&options);
options.c_cflag &= ~CSIZE;
options.c_cflag |= CS8;
options.c_cflag &= ~CSTOPB;
options.c_cflag &= ~CRTSCTS;
options.c_cflag &= ~PARENB;
options.c_cc[VTIME] = 0;
options.c_cc[VMIN] = 1;
tcflush(uartFD, TCIOFLUSH);
if(tcsetattr(uartFD, TCSANOW, &options) == 0){
std::cout<<"tcsetattr :uart OK"<<std::endl;
runUart = 1;
return 1;
}
else {
perror("tcsetattr fd");
close(uartFD);
return -1;
}
return -1;
}
void CLASS_UART::run_thread(){
th_work = 1;
while(th_work > 0){
if(runUart < 0){
std::this_thread::sleep_for(std::chrono::milliseconds(50));
}
else{
int packetIndex = 0;
epoll_event events[MAX_EVENTS];
memset(events, 0, sizeof(events));
while (runUart > 0) {
eventCount = epoll_wait(fdEp, events, MAX_EVENTS,5);
if (eventCount == -1) {
cout << "exit : eventCount == -1 "<<std::endl<<std::flush;
stop_thread();
break;
}else if (eventCount == 0) {
if(sendnumber > 0){
int w = write(uartFD,sendBuffer,sendnumber);
cout <<"sendnumber="<<sendnumber<<std::endl;
cout <<"write num="<<w<<std::endl;
sendnumber = 0;
}
if(packetIndex > 0){
cout <<" "<<endl;
std::cout << "All read number: " << allreadnumber << std::endl;
std::cout << "All read data: "<<endl;
std::cout << allreadBuffer << std::endl;
packetIndex = write(uartFD,allreadBuffer,allreadnumber);
allreadnumber = 0;
packetIndex = 0;
for (int r = 0; r < 8192; ++r) {
allreadBuffer[r] = '\0';
}
std::cout << endl;
}
}else{
for (int i = 0; i < eventCount; i++) {
if (events[i].data.fd == uartFD) {
if(events[i].events & EPOLLIN){
for (int r = 0; r < 1024; ++r) {
onceBuffer[r] = '\0';
}
int readnumber = read(uartFD,onceBuffer,1024);
if (readnumber < 0) {
perror("read");
break;
} else if (readnumber == 0) {
continue;
} else {
if(packetIndex > 0){
int s = 0;
for (int r = allreadnumber; r < allreadnumber+readnumber; ++r) {
allreadBuffer[r] = onceBuffer[s];
s++;
}
allreadnumber += readnumber;
packetIndex++;
}
else{
for (int r = 0; r < readnumber; ++r) {
allreadBuffer[r] = onceBuffer[r];
}
allreadnumber += readnumber;
packetIndex++;
}
}
}
else if(events[i].events & EPOLLERR){
}
}
}
if(sendnumber > 0){
int w = write(uartFD,sendBuffer,sendnumber);
cout <<"sendnumber="<<sendnumber<<std::endl;
cout <<"write num="<<w<<std::endl;
sendnumber = 0;
}
}
}
struct epoll_event event;
event.events = EPOLLIN;
event.data.fd = uartFD;
event.events = 0;
if (epoll_ctl(fdEp, EPOLL_CTL_DEL,uartFD, &event) == -1) {
std::cerr << "Failed to remove file uartFD from epoll" << std::endl;
}
close(fdEp);
close(uartFD);
}
}
}
int CLASS_UART::send_data(char *data, int size) {
cout << "UART send_data:"<<data<<std::endl;
sendnumber = size;
for (int r = 0; r < 8192; ++r) {
sendBuffer[r] = '\0';
}
for (int r = 0; r < size; ++r) {
sendBuffer[r] = data[r];
}
return sendnumber;
}
 电子发烧友论坛
电子发烧友论坛 /9
/9 



 工商网监
湘ICP备2023018690号
工商网监
湘ICP备2023018690号




 淘帖
淘帖 702
702






