IR
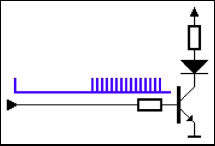
红外是一种电磁波,可以实现数据的无线传输,由发送和接收两个部分组成。发送端对红外信号进行脉冲编码,接收端完成对红外信号的脉冲解码。红外遥控协议有多种,如 NEC、SIRC、 RC-5 等,这些协议都比较简单,基本都是以脉冲宽度或脉冲间隔来编码。当遥控器按下按键时,遥控器逻辑单元会产生一个完整的脉冲波形,包含遥控指令的信息,即红外传输的基带信号。这个波形被送到遥控器的调制单元,经调制单元调制成高频红外电磁波信号,由发光二极管发射出去,如下图所示。
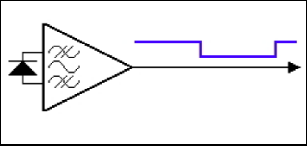
红外电磁波信号一般使用一体化接收头接收,同时完成信号的解调和放大,其输出信号就是红外的基带脉冲信号。解调后的信号可直接送入信号处理单元,由处理单元对脉冲波形进行解码,典型红外接收电路如下图所示。
相对应的,IR RX 模块属于INPUT 输入设备,支持红外遥控器的按键遥控。具体规格如下所示:
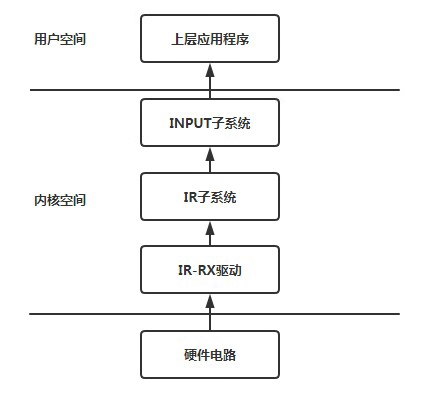
整个系统框架流程如上图所示:当用户按下遥控器的时候,会触发一个中断。IR 驱动会进入中断,然后解析遥控器发送的键值,然后对该电压值进行解码,然后将该事件上报给INPUT 子系统。INPUT 子系统找到相应的事件处理程序之后,会将该按键事件上报给用户空间,等待用户程序对该按键信息的读取与处理。
IR TX 发送 (CIR_TX)
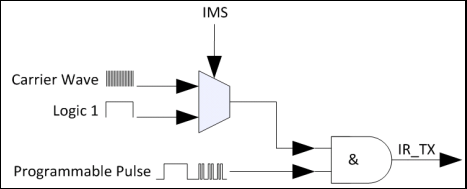
模块内部调制原理
内部调制原理如下图所示。其中 IMS(Internal Modulation Select),为选择使用内部调制或不调制。软件需设置使用IMS。
载波频率设置
载波频率计算公式为:
Fc = Fclk / [(RFMC + 1) * (DRMC + 2)] (公式1)
其中
- Fc为载波频率;
- Fclk为Sunxi IR-TX时钟源,目前配置为12MHz;
- RFMC为载波分频系数,由MCR寄存器(0x04)bit[7:0]设定;
- DRMC为载波占空比设置,由GLR寄存器(0x00)bit[6:5]设定,可配置1/2、1/3或1/4。
通常,载波占空比DRMC 和载波频率 Fc 由应用层设定,因此设置载波占空比即转换为设置GLR bit[6:5],设置载波频率即转换成设置MCR bit[7:0],由公式1 变换得计算RFMC 的公式为:
RFMC = Fclk / [Fc *(DRMC + 2)] - 1 (公式2)
数据发送流程
CIR-TX 驱动数据发送流程如下图所示:
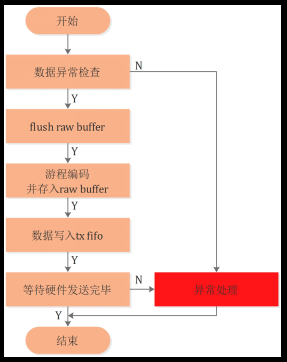
设置载波占空比
由于硬件只支持1/4、1/3 和1/2 三挡占空比设置,因此Sunxi IR-TX 驱动设置载波占空比的流
程比较简单:上层传递一个0~100 的数值,如果该数值小于30,则设定占空比为1/4;如果该
数值大于30 且小于40,则设定占空比为1/3;如果该数值大于40,则设定占空比为1/2。最后
更新硬件配置。
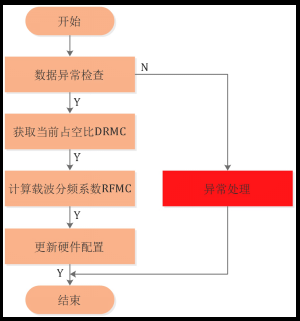
设置载波频率
IR-TX 驱动设置载波频率流程如下图所示:
模块配置介绍
IR_TX 在 menuconfig 中配置如下
模块源码结构
CIR_TX 模块源码结构如下所示:
rtos-hal/
|--hal/source/cir_tx/hal_cir_tx
|--include/hal/sunxi_hal_cir_tx.h
模块接口说明
头文件
#include <sunxi_hal_cir_tx.h>
IRTX 初始化
IRTX 模块初始化,主要完成clk 初始化
函数原型:
cir_tx_status_t hal_cir_tx_init(struct sunxi_cir_tx_t *cir_tx);
参数:
返回值:
IRTX 设置载波占空比
配置 IRTX 模块占空比
函数原型:
void hal_cir_tx_set_duty_cycle(int duty_cycle);
参数:
返回值:
IRTX 设置载波频率
设置载波频率
函数原型:
void hal_cir_tx_set_carrier(int carrier_freq);
参数:
返回值:
IRTX 使能发送
发送IRTX 数据
函数原型:
void hal_cir_tx_xmit(unsigned int *txbuf, unsigned int count);
参数:
txbuf: 代表数据 bufcount: 代表数据长度
返回值:
模块使用范例
#include <stdint.h>
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <unistd.h>
#include <hal_cmd.h>
#include "sunxi_hal_cir_tx.h"
#define NS_TO_US(nsec) ((nsec) / 1000)
#define NEC_NBITS 32
#define NEC_UNIT 562500
#define NEC_HEADER_PULSE \
(16 * NEC_UNIT)
#define NEC_HEADER_SPACE (8 * NEC_UNIT)
#define NEC_BIT_PULSE (1 * NEC_UNIT)
#define NEC_BIT_0_SPACE (1 * NEC_UNIT)
#define NEC_BIT_1_SPACE (3 * NEC_UNIT)
#define NEC_TRAILER_PULSE (1 * NEC_UNIT)
#define NEC_TRAILER_SPACE (10 * NEC_UNIT)
#define GPIO_IR_RAW_BUF_SIZE 128
#define DEFAULT_DUTY_CYCLE 33
#define DEFAULT_CARRIER_FREQ 38000
#define LIRC_MODE2_PULSE 0x01000000
#define LIRC_MODE2_SPACE 0x00000000
#define LIRC_VALUE_MASK 0x00FFFFFF
#define LIRC_MODE2_MASK 0xFF000000
#define LIRC_PULSE(val) (((val)&LIRC_VALUE_MASK) | LIRC_MODE2_PULSE)
#define LIRC_SPACE(val) (((val)&LIRC_VALUE_MASK) | LIRC_MODE2_SPACE)
uint32_t tx_raw_buf[GPIO_IR_RAW_BUF_SIZE];
static int nec_modulation_byte(uint32_t *buf, uint8_t code) {
int i = 0;
uint8_t mask = 0x01;
while (mask) {
if (code & mask) {
*(buf + i) = LIRC_PULSE(NS_TO_US(NEC_BIT_PULSE));
*(buf + i + 1) = LIRC_SPACE(NS_TO_US(NEC_BIT_1_SPACE));
} else {
*(buf + i) = LIRC_PULSE(NS_TO_US(NEC_BIT_PULSE));
*(buf + i + 1) = LIRC_SPACE(NS_TO_US(NEC_BIT_0_SPACE));
}
mask <<= 1;
i += 2;
}
return i;
}
static int ir_lirc_transmit_ir(uint32_t *raw_buf, size_t n) {
int ret, count;
count = n / sizeof(unsigned int);
if (count > 1024 || count % 2 == 0) {
return -1;
}
}
static int nec_ir_encode(uint32_t *raw_buf, uint32_t key_code) {
uint8_t address, reverse_address, command, reverse_command;
uint32_t *head_p, *data_p, *stop_p;
address = (key_code >> 24) & 0xff;
reverse_address = (key_code >> 16) & 0xff;
command = (key_code >> 8) & 0xff;
reverse_command = (key_code >> 0) & 0xff;
head_p = raw_buf;
*(head_p) = LIRC_PULSE(NS_TO_US(NEC_HEADER_PULSE));
*(head_p + 1) = LIRC_PULSE(NS_TO_US(NEC_HEADER_SPACE));
data_p = raw_buf + 2;
nec_modulation_byte(data_p, address);
data_p += 16;
nec_modulation_byte(data_p, reverse_address);
data_p += 16;
nec_modulation_byte(data_p, command);
data_p += 16;
nec_modulation_byte(data_p, reverse_command);
stop_p = data_p + 16;
*(stop_p) = LIRC_PULSE(NS_TO_US(NEC_TRAILER_PULSE));
*(stop_p + 1) = LIRC_PULSE(NS_TO_US(NEC_TRAILER_SPACE));
return ((NEC_NBITS + 2) * 2 - 1);
}
int cmd_test_cir_tx(int argc, char **argv) {
int key_code = 0x04fb13ec;
int i, size;
int count = 67;
struct sunxi_cir_tx_t *cir_tx;
hal_cir_tx_init(cir_tx);
hal_cir_tx_set_duty_cycle(DEFAULT_DUTY_CYCLE);
hal_cir_tx_set_carrier(DEFAULT_CARRIER_FREQ);
size = nec_ir_encode(tx_raw_buf, key_code);
for (i = 0; i < size; i++) {
printf("%d ", *(tx_raw_buf + i) & 0x00FFFFFF);
if ((i + 1) % 8 == 0) {
printf("\n");
}
}
printf("\n");
for (i = 0; i < size; i++) tx_raw_buf[i] = (tx_raw_buf[i] & 0x00FFFFFF);
hal_cir_tx_xmit(tx_raw_buf, count);
printf("end test!\n");
return 0;
}
IR RX 接收(CIR)
模块配置介绍
IR 在 menuconfig 中配置如下
模块源码结构
CIR 模块源码结构如下所示:
rtos-hal/
|--hal/source/cir/hal_cir.c
|--include/hal/sunxi_hal_cir.h
模块返回值定义
| 返回值 |
枚举 |
定义 |
|---|
| -4 |
CIR_PIN_ERR |
配置的 CIR 引脚错误 |
| -3 |
CIR_CLK_ERR |
配置的 CIR 模块时钟错误 |
| -2 |
CIR_IRQ_ERR |
中断配置错误 |
| -1 |
CIR_PORT_ERR |
配置 CIR 端口错误 |
| 0 |
CIR_OK |
成功 |
typedef enum {
CIR_PIN_ERR = -4,
CIR_CLK_ERR = -3,
CIR_IRQ_ERR = -2,
CIR_PORT_ERR = -1,
CIR_OK = 0,
} cir_status_t;
模块接口说明
头文件
#include <sunxi_hal_cir.h>
IR 初始化接口
IR 模块初始化,主要初始化采样率、通道选择及注册中断等
函数原型:
cir_status_t sunxi_cir_init(cir_port_t port);
参数:
返回值:
IR 注册回调接口
向应用层提供注册回调接口的功能
函数原型:
void sunxi_cir_callback_register(cir_port_t port, cir_callback_t callback);
参数:
port :CIR 通道callback:应用层回调接口
返回值:
IR 去初始化接口
函数原型:
void sunxi_cir_deinit(cir_port_t port);
参数:
返回值:
模块使用范例
#include <stdint.h>
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <unistd.h>
#include <hal_cmd.h>
#include <hal_log.h>
#include "sunxi_hal_cir.h"
static cir_callback_t cir_irq_callback(uint32_t data_type, uint32_t data) {
printf("reg_val:0x%u\n", data);
return 0;
}
int cmd_test_cir(int argc, char **argv) {
cir_port_t port;
int ret = -1;
int timeout_sec = 15;
TickType_t start_ticks, current_ticks;
printf("Run ir test\n");
if (argc < 2) {
hal_log_err("usage: hal_ir channel\n");
return -1;
}
port = strtol(argv[1], NULL, 0);
ret = sunxi_cir_init(port);
if (ret) {
hal_log_err("cir init failed!\n");
return -1;
}
sunxi_cir_callback_register(port, cir_irq_callback);
start_ticks = xTaskGetTickCount();
printf("start_ticks: %u\n", start_ticks);
while (1) {
current_ticks = xTaskGetTickCount();
if ((current_ticks - start_ticks) * portTICK_PERIOD_MS >=
timeout_sec * 1000) {
printf("current_ticks: %u\n", current_ticks);
break;
}
}
sunxi_cir_deinit(port);
return 0;
}
 电子发烧友论坛
电子发烧友论坛 /9
/9 



 工商网监
湘ICP备2023018690号
工商网监
湘ICP备2023018690号












 淘帖
淘帖 1333
1333






