TWI
模块介绍
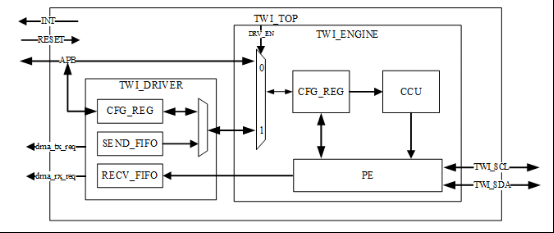
TWI 控制器的框图如上所示,该控制器支持的标准通信速率为 100Kbps,最高通信速率可以达到 400Kbps。其中 CPUX 域的 TWI 控制器时钟源来自于 APB2,CPUS 域的 S‑TWI 时钟源来自于APBS。
TWI 传输数据的方式包括包传输和 DMA 运输。
模块配置
模块配置在 menuconfig 位于如下位置
Kernel Setup --->
Drivers Setup --->
SoC HAL Drivers --->
TWI devices --->
[*] enable twi driver
TWI 模块寄存器的基本配置位于 common_twi.h 文件里面,包括每个 TWI 的寄存器地址和中断号,部分配置如下:
#define TWI_ADDR_REG (0x00)
#define TWI_XADDR_REG (0x04)
#define TWI_DATA_REG (0x08)
#define TWI_CTL_REG (0x0C)
#define TWI_STAT_REG (0x10)
#define TWI_CLK_REG (0x14)
#define TWI_SRST_REG (0x18)
#define TWI_EFR_REG (0x1C)
#define TWI_LCR_REG (0x20)
#define TWI_DVFS_REG (0x24)
#define TWI_DRIVER_CTRL (0x200)
...
TWI 模块对于不同平台的区分位于 platform\twi_sun20iw3.h 中。包括基地址以及平台相关参数
#ifdef CONFIG_ARCH_SUN20IW3
#define SUNXI_GIC_START 16
#else
#define SUNXI_GIC_START 0
#endif
#define SUNXI_TWI0_PBASE 0x02502000
#define SUNXI_IRQ_TWI0 (41 - SUNXI_GIC_START)
#define TWI0_SCK GPIOA(16)
#define TWI0_SDA GPIOA(17)
#define TWI0_PIN_MUXSEL 4
#define SUNXI_TWI1_PBASE 0x02502400
#define SUNXI_IRQ_TWI1 (42 - SUNXI_GIC_START)
#define TWI1_SCK GPIOA(6)
#define TWI1_SDA GPIOA(7)
#define TWI1_PIN_MUXSEL 4
...
源码结构
rtos‑hal/
|‑‑hal/source/twi/hal_twi.c
|‑‑include/hal/sunxi_hal_twi.h
模块接口说明
头文件:
#include <sunxi_hal_twi.h>
TWI 端口号 twi_port_t
该数据结构主要用来表明 TWI 的编号,用户可以用来调用 TWI 的控制器。具体定义如下:
typedef enum
{
TWI_MASTER_0,
TWI_MASTER_1,
TWI_MASTER_2,
TWI_MASTER_3,
TWI_MASTER_4,
TWI_MASTER_5,
S_TWI_MASTER_0,
S_TWI_MASTER_1,
S_TWI_MASTER_2,
TWI_MASTER_MAX
} twi_port_t;
TWI 消息结构体 twi_msg_t
该数据结构是 TWI 通信时的消息结构,定义每个通信数据的格式:
typedef struct twi_msg
{
uint16_t addr;
uint16_t flags;
#define TWI_M_RD 0x0001
#define TWI_M_TEN 0x0010
uint16_t len;
uint8_t *buf;
} twi_msg_t;
TWI 控制结构体 hal_twi_transfer_cmd_t
该数据接口储存了一些用户在调用 twi_control 的时候可以用到的一些参数,具体如下:
typedef enum
{
I2C_SLAVE = 0,
I2C_SLAVE_FORCE = 1,
I2C_TENBIT = 2,
I2C_RDWR = 3
} hal_twi_transfer_cmd_t;
TWI 频率结构体 twi_frequency_t
typedef enum
{
TWI_FREQUENCY_100K = 100000,
TWI_FREQUENCY_200K = 200000,
TWI_FREQUENCY_400K = 400000,
} twi_frequency_t;
TWi 返回值结构体
typedef enum
{
TWI_STATUS_ERROR = -4,
TWI_STATUS_ERROR_BUSY = -3,
TWI_STATUS_INVALID_PORT_NUMBER = -2,
TWI_STATUS_INVALID_PARAMETER = -1,
TWI_STATUS_OK = 0
} twi_status_t;
TWI 初始化接口
TWI 模块初始化,主要初始化时钟,中断以及引脚配置等
函数原型:
twi_status_t hal_twi_init(twi_port_t port)
参数:
返回值:
TWI 控制接口
更改 TWI 的一些配置,包括从设备地址以及读写数据等
函数原型:
twi_status_t hal_twi_control(twi_port_t port, hal_twi_transfer_cmd_t cmd, void *args)
参数:
- port:端口号
- cmd:控制参数
- args:传入的配置数据
返回值:
TWI 数据发送接口
函数原型:
twi_status_t hal_twi_write(twi_port_t port, unsigned long pos, const void *buf, uint32_t size)
参数:
- port:通道号
- pos:偏移量(目前支持 1 个字节大小)
- buf:待发送数据
- size:发送数据大小,不包括偏移量
返回值:
TWI 数据接收接口
函数原型:
twi_status_t hal_twi_write(twi_port_t port, unsigned long pos, const void *buf, uint32_t size)
参数:
- port:通道号
- pos:偏移量(目前支持 1 个字节大小)
- buf:接收的数据
- size:接收数据大小,不包括偏移量
返回值:
TWI 去初始化接口
函数原型:
twi_status_t hal_twi_deinit(twi_port_t port)
参数:
返回值:
模块使用范例
#include <stdio.h>
#include <stdlib.h>
#include <stdint.h>
#include <string.h>
#include <unistd.h>
#include <hal_log.h>
#include <hal_cmd.h>
#include <sunxi_hal_twi.h>
#define TEST_READ 0
#define TEST_WRITE 1
static int cmd_test_twi(int argc, const char **argv)
{
twi_msg_t msg;
twi_port_t port;
uint16_t addr;
char reg_addr, reg_val = 0, rw = TEST_READ;
int c;
if (argc < 5)
{
hal_log_info("Usage:");
hal_log_info("\ttwi [port] [slave_addr] [reg] -r");
hal_log_info("\t -w [val]");
return -1;
}
port = strtol(argv[1], NULL, 0);
addr = strtol(argv[2], NULL, 0);
reg_addr = strtol(argv[3], NULL, 0);
if (argv[5])
{
reg_val = strtol(argv[5], NULL, 0);
}
while ((c = getopt(argc, (char *const *)argv, "rw")) != -1)
{
switch (c)
{
case 'r':
hal_log_info("twi read test");
rw = TEST_READ;
break;
case 'w':
hal_log_info("twi write test");
rw = TEST_WRITE;
break;
default:
hal_log_err("invalid param!");
}
}
hal_twi_init(port);
hal_twi_control(port, TWI_SLAVE, &addr);
if (rw == TEST_READ)
{
hal_twi_read(port, reg_addr, ®_val, 1);
hal_log_info("reg_val: 0x%x", reg_val);
}
else if (rw == TEST_WRITE)
{
uint8_t buf[2];
buf[0] = reg_addr;
buf[1] = reg_val;
msg.flags = 0;
msg.addr = addr;
msg.len = 2;
msg.buf = buf;
hal_twi_control(port, TWI_RDWR, &msg);
}
hal_twi_uninit(port);
return 0;
}
 电子发烧友论坛
电子发烧友论坛 /9
/9 



 工商网监
湘ICP备2023018690号
工商网监
湘ICP备2023018690号





 淘帖
淘帖 2326
2326






