概述
本篇文章主要介绍如何使用e2studio对瑞萨RA4M2开发板进行串口打印配置。
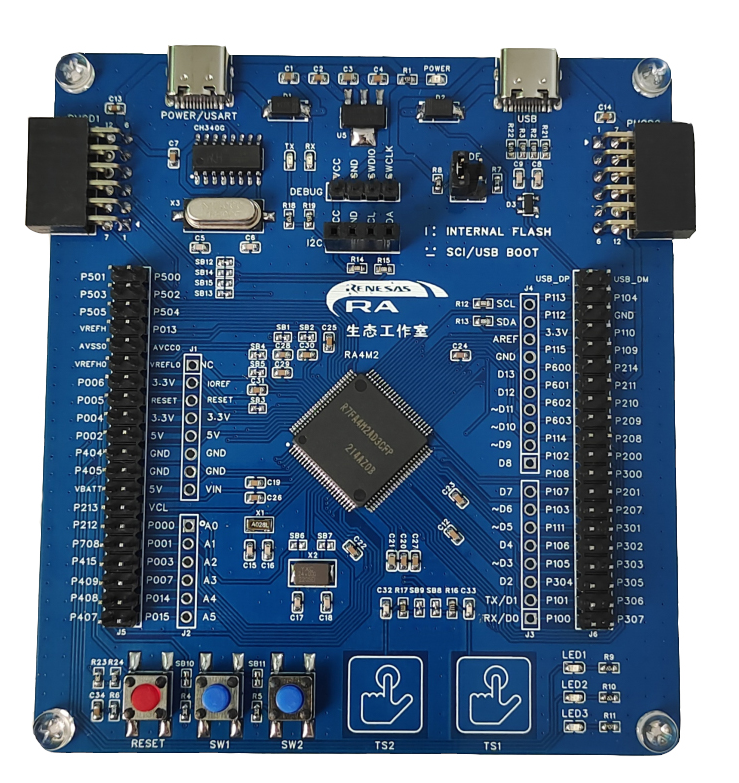
硬件准备
首先需要准备一个开发板,这里我准备的是芯片型号R7FAM2AD3CFP的开发板:
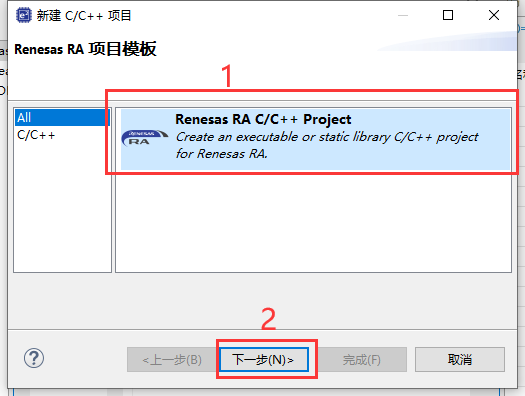
新建工程

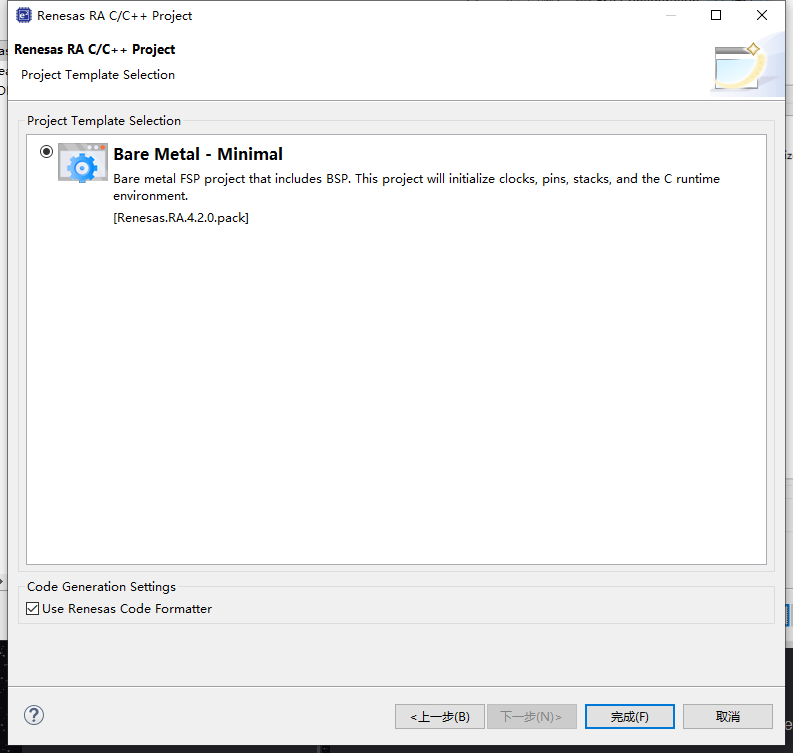
工程模板
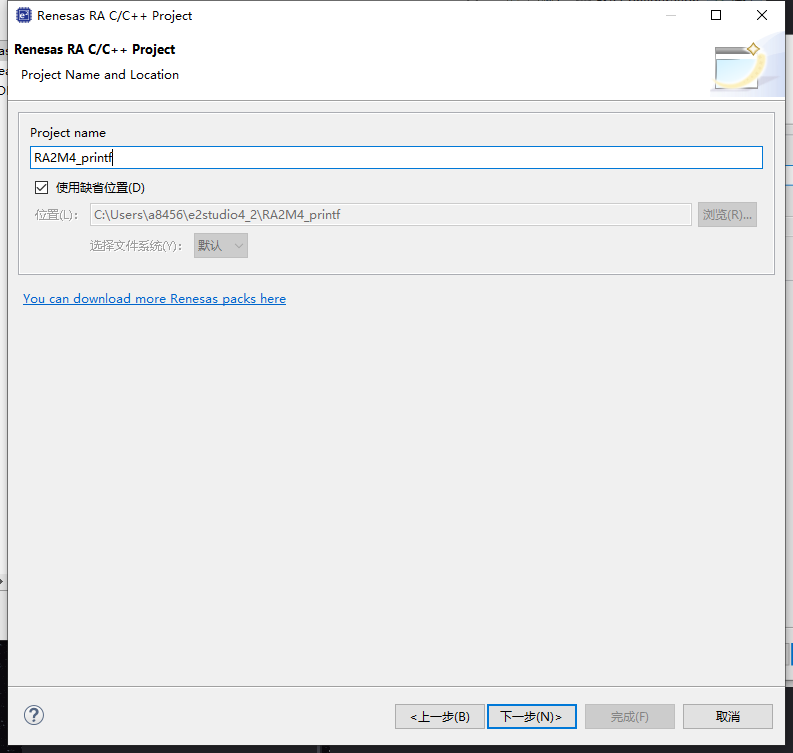
保存工程路径
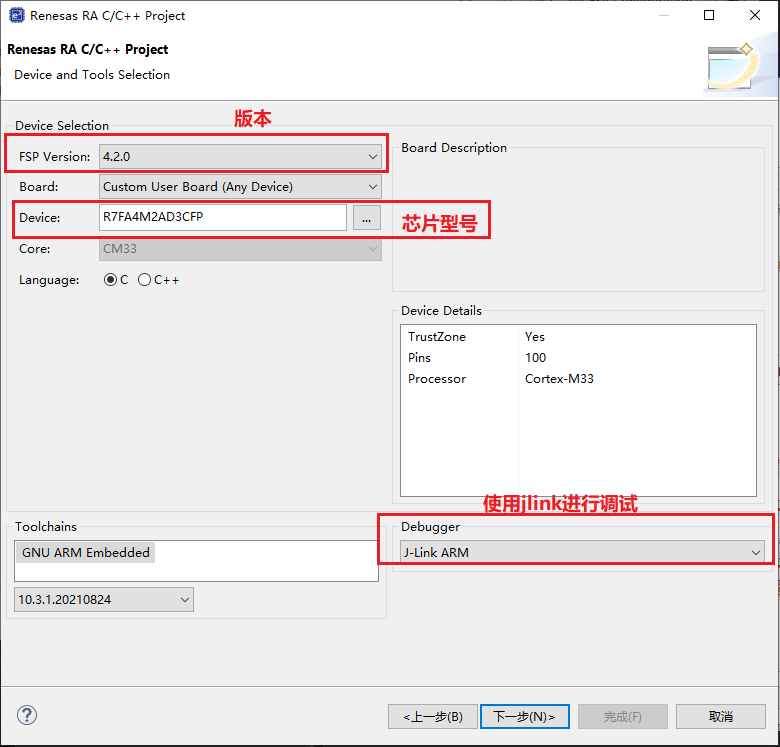
芯片配置
本文中使用R7FA4M2AD3CFP来进行演示。
工程模板选择
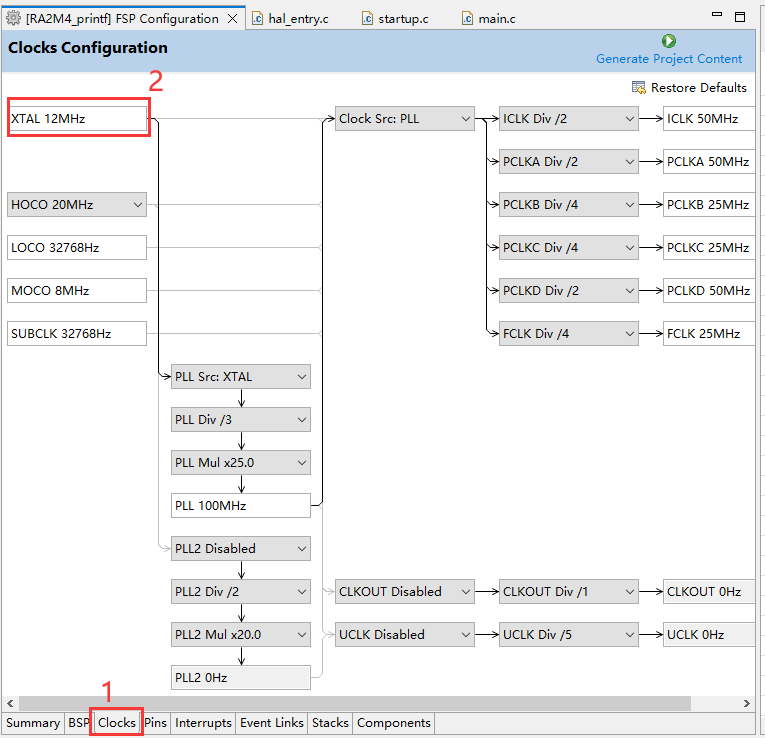
时钟设置
开发板上的外部高速晶振为12M.
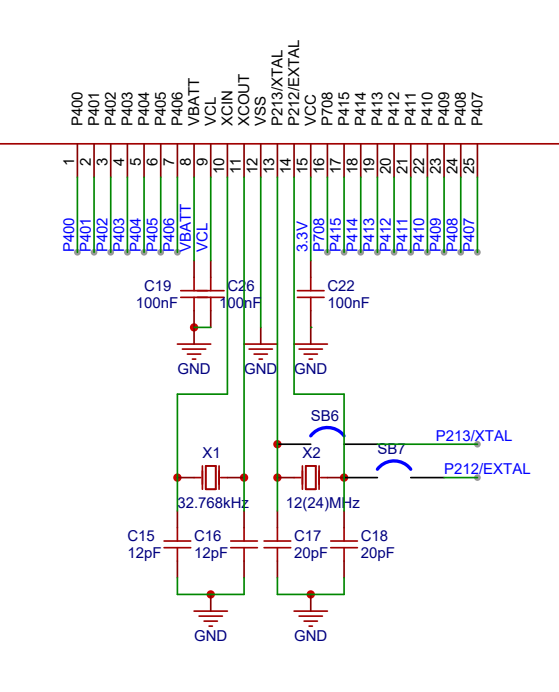
需要修改XTAL为12M。
管脚配置
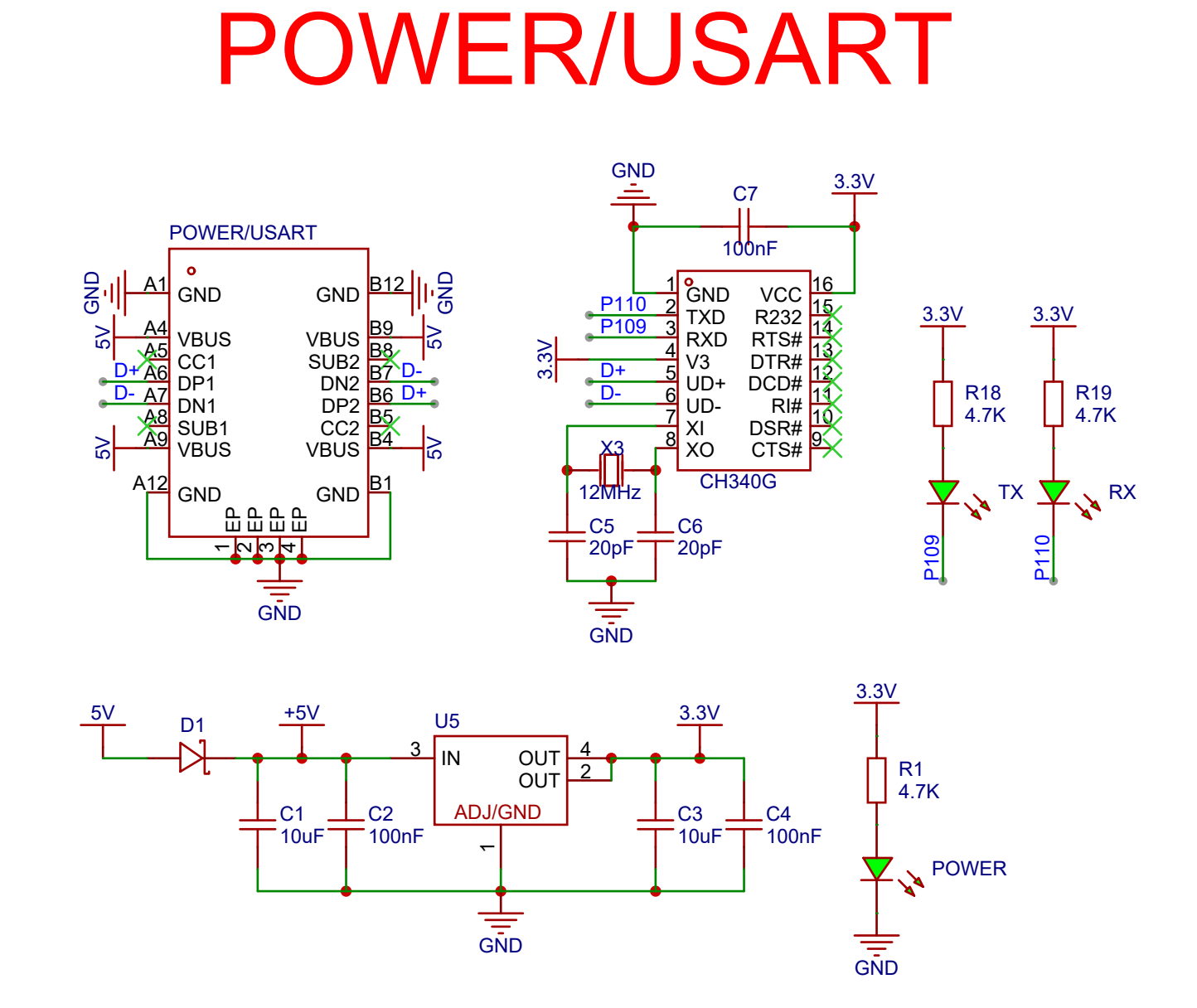
查看原理图可以得知,串口为P109和P110。
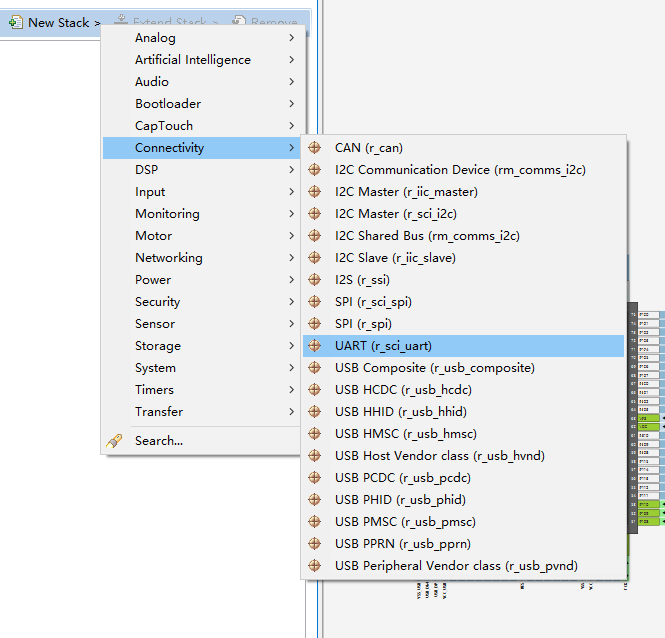
UART配置
点击Stacks->New Stack->Driver->Connectivity -> UART Driver on r_sci_uart。
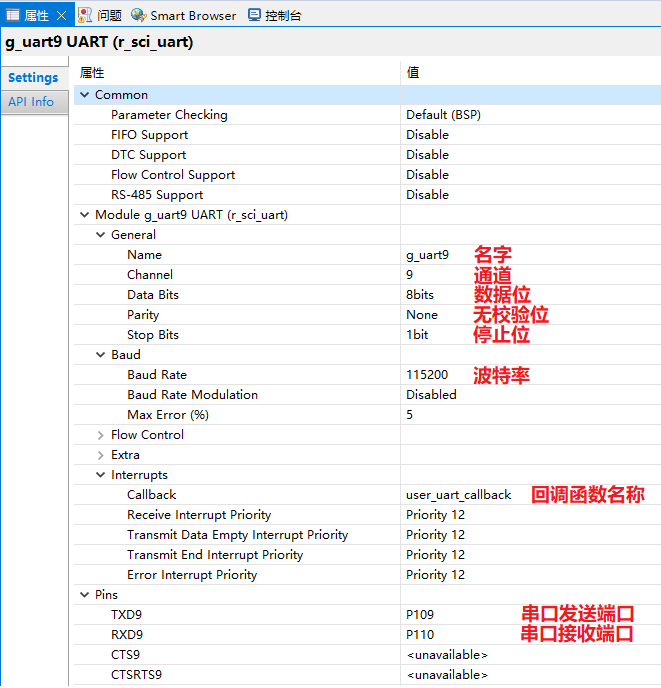
UART属性配置
printf()函数
printf()函数是式样化输出函数, 一般用于向准则输出设备按规定式样输出消息。正在编写步骤时经常会用到此函数。printf()函数的挪用式样为: printf(“<式样化字符串>”,<参数表>);
其中式样化字符串包括两部分内容: 一部分是正常字符, 这些字符将按原样输出;另一部分是式样化规定字符, 以"%“开端, 后跟一个或几个规定字符, 用来确定输出内容式样。 参量表是需求输出的一系列参数, 其个数务必与式样化字符串所阐明的输出参数个数一样多, 各参数之间用英文逗号”,"分开, 且顺序逐一对应, 不然将会出现意想不到的错误。
注意:函数printf从右到左压栈,然后将先读取放到栈底,最后读取的放在栈顶,处理时候是从栈顶开始的,所以我们看见的结果是,从右边开始处理的。
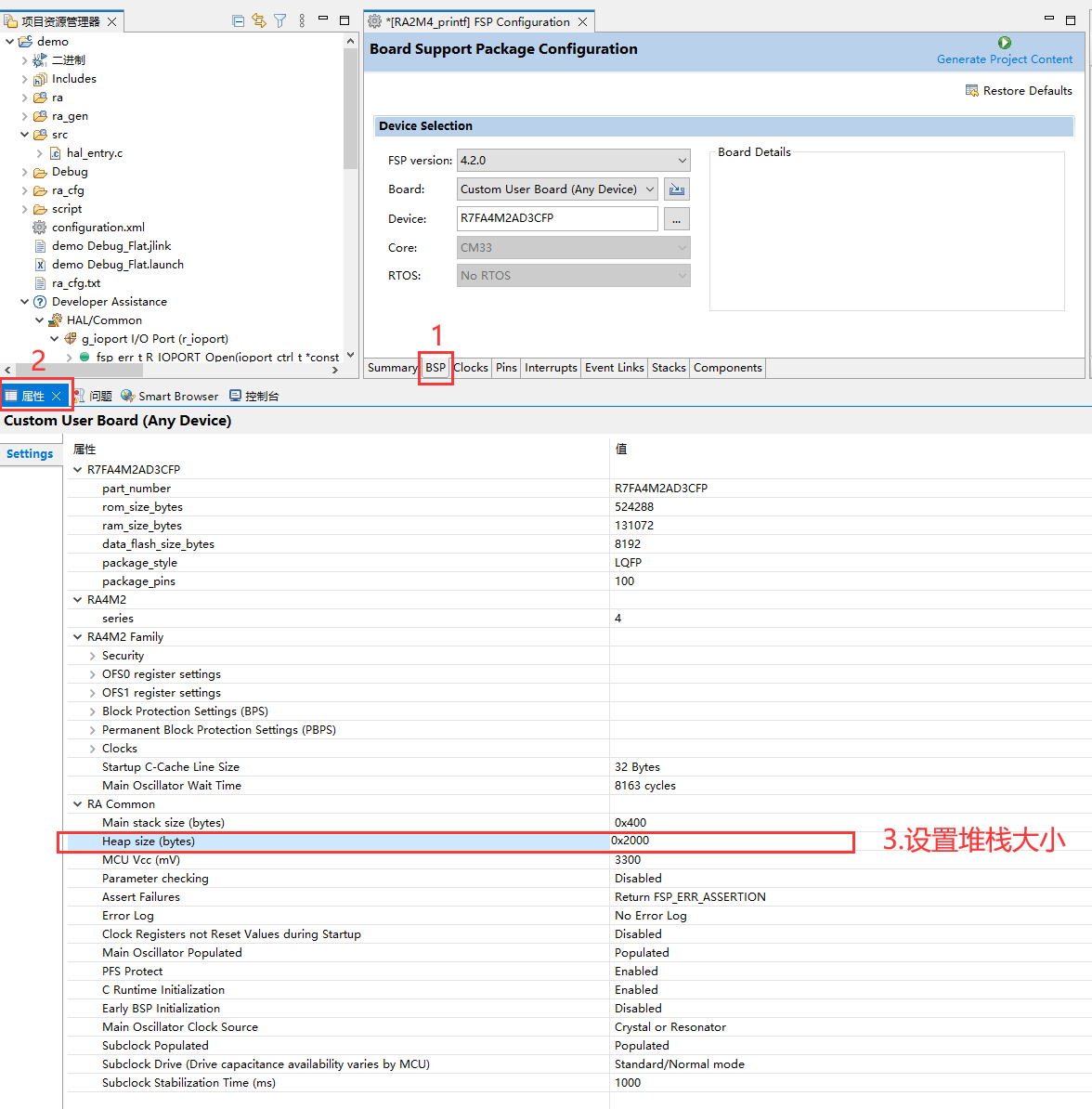
设置e2studio堆栈
printf函数通常需要设置堆栈大小。这是因为printf函数在运行时需要使用栈空间来存储临时变量和函数调用信息。如果堆栈大小不足,可能会导致程序崩溃或不可预期的行为。
printf函数使用了可变参数列表,它会在调用时使用栈来存储参数,在函数调用结束时再清除参数,这需要足够的栈空间。另外printf也会使用一些临时变量,如果栈空间不足,会导致程序崩溃。
因此,为了避免这类问题,应该根据程序的需求来合理设置堆栈大小。
e2studio的重定向printf设置
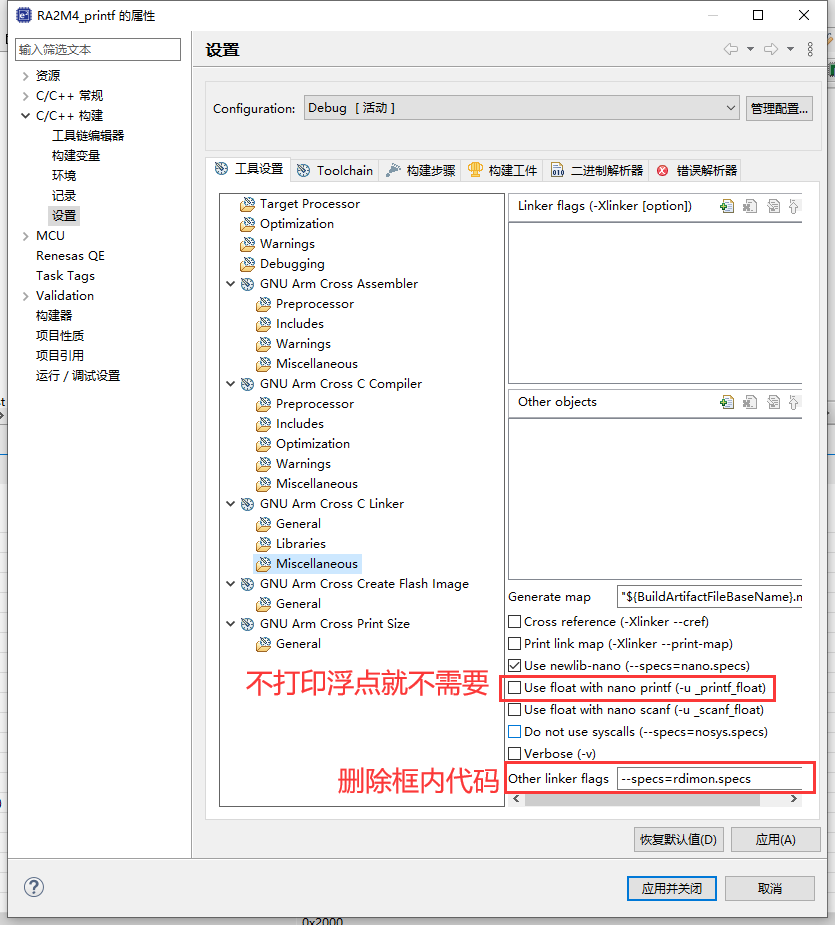
在e2studio中使用printf打印时,如果在链接器脚本文件中使用了--specs=rdimon.specs参数,则编译器会使用rdimon.specs文件中的系统调用函数来实现printf函数。
在这种情况下,printf函数的输出会被重定向到一个固定的地址(通常是RAM中的一段地址),而不是直接输出到控制台或串口。这样就需要在程序中实现一个驱动程序来读取这些输出并将其输出到控制台或串口。
如果希望printf函数的输出直接输出到控制台或串口,那么需要删除--specs=rdimon.specs参数。这样编译器就会使用标准的printf函数实现,输出就会直接输出到控制台或串口。
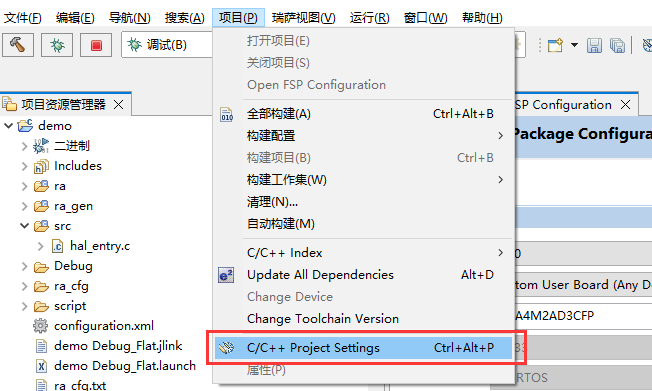
C++ 构建->设置->GNU ARM Cross C Linker->Miscellaneous去掉Other linker flags中的 “--specs=rdimon.specs”
R_SCI_UART_Open()函数原型
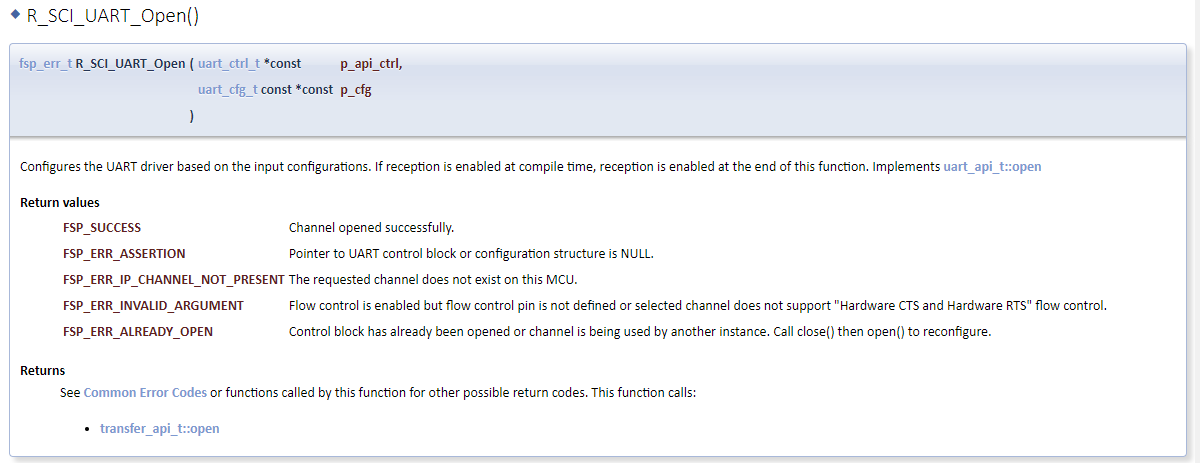
故可以用 R_SCI_UART_Open()函数进行配置,开启和初始化UART。
fsp_err_t err = R_SCI_UART_Open(&g_uart9_ctrl, &g_uart9_cfg);
assert(FSP_SUCCESS == err);
回调函数user_uart_callback ()
当数据发送的时候,可以查看UART_EVENT_TX_COMPLETE来判断是否发送完毕。
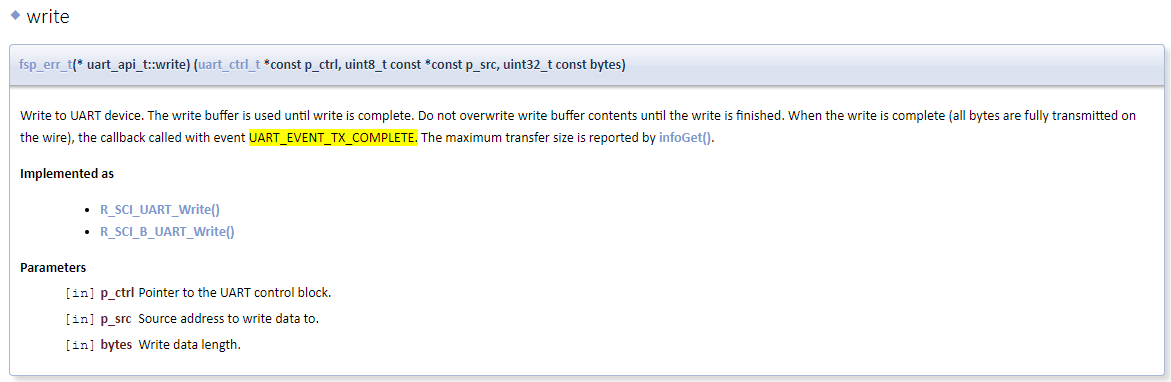
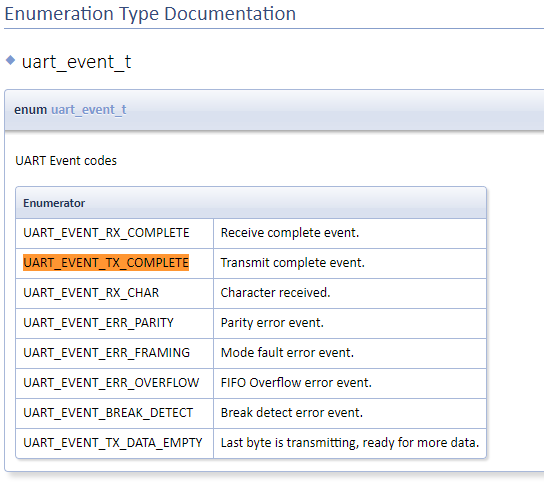
可以检查检查 "p_args" 结构体中的 "event" 字段的值是否等于 "UART_EVENT_TX_COMPLETE"。如果条件为真,那么 if 语句后面的代码块将会执行。
volatile bool uart_send_complete_flag = false;
void user_uart_callback (uart_callback_args_t * p_args)
{
if(p_args->event == UART_EVENT_TX_COMPLETE)
{
uart_send_complete_flag = true;
}
}
printf输出重定向到串口
打印最常用的方法是printf,所以要解决的问题是将printf的输出重定向到串口,然后通过串口将数据发送出去。
注意一定要加上头文件#include <stdio.h>
#ifdef __GNUC__
#define PUTCHAR_PROTOTYPE int __io_putchar(int ch)
#else
#define PUTCHAR_PROTOTYPE int fputc(int ch, FILE *f)
#endif
PUTCHAR_PROTOTYPE
{
err = R_SCI_UART_Write(&g_uart9_ctrl, (uint8_t *)&ch, 1);
if(FSP_SUCCESS != err) __BKPT();
while(uart_send_complete_flag == false){}
uart_send_complete_flag = false;
return ch;
}
int _write(int fd,char *pBuffer,int size)
{
for(int i=0;i<size;i++)
{
__io_putchar(*pBuffer++);
}
return size;
}
完整代码
#include "hal_data.h"
#include <stdio.h>
FSP_CPP_HEADER
void R_BSP_WarmStart(bsp_warm_start_event_t event);
FSP_CPP_FOOTER
fsp_err_t err = FSP_SUCCESS;
volatile bool uart_send_complete_flag = false;
void user_uart_callback(uart_callback_args_t *p_args)
{
if(p_args->event == UART_EVENT_TX_COMPLETE)
{
uart_send_complete_flag = true;
}
}
#ifdef __GNUC__
#define PUTCHAR_PROTOTYPE int __io_putchar(int ch)
#else
#define PUTCHAR_PROTOTYPE int fputc(int ch, FILE *f)
#endif
PUTCHAR_PROTOTYPE
{
err = R_SCI_UART_Write(&g_uart9_ctrl, (uint8_t *)&ch, 1);
if(FSP_SUCCESS != err) __BKPT();
while(uart_send_complete_flag == false){}
uart_send_complete_flag = false;
return ch;
}
int _write(int fd,char *pBuffer,int size)
{
for(int i=0;i<size;i++)
{
__io_putchar(*pBuffer++);
}
return size;
}
void hal_entry(void)
{
err = R_SCI_UART_Open(&g_uart9_ctrl, &g_uart9_cfg);
assert(FSP_SUCCESS == err);
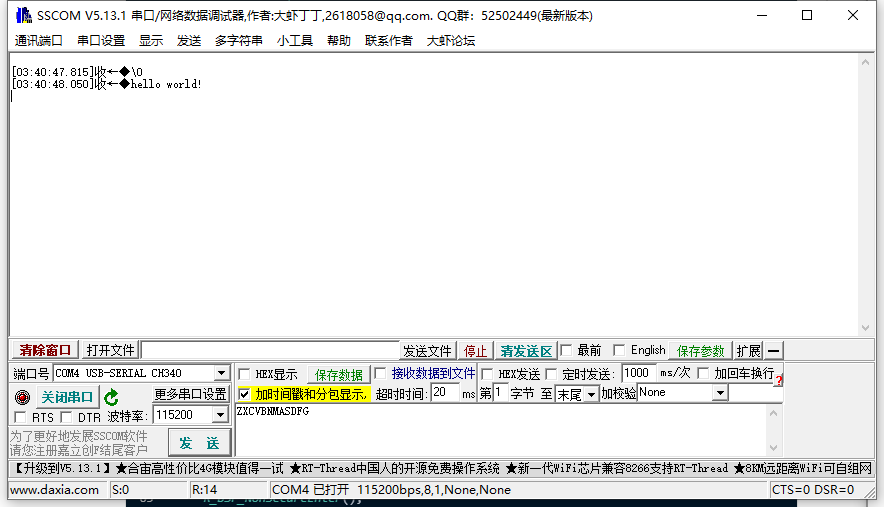
printf("hello world!\n");
#if BSP_TZ_SECURE_BUILD
R_BSP_NonSecureEnter();
#endif
}
实现效果
 电子发烧友论坛
电子发烧友论坛 /9
/9 



 工商网监
湘ICP备2023018690号
工商网监
湘ICP备2023018690号




 18011
18011

















 淘帖
淘帖




