本次主要利用Banana PI Leaf S3开发板 驱动 SSD1306的OLED屏幕。
一、硬件
(一)Banana PI Leaf S3开发板
BPI-Leaf-S3开发板上标记了与芯片对应的所有IO管脚,且IO管脚顺序与Espressif ESP32-S3-DevKitC-1开发板一致,可根据实际需求,可将DevKitC-1支持的外围设备添加到BPI-Leaf-S3上,也可将开发板插在面包板上使用。

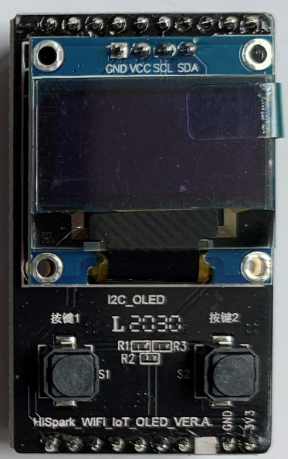
(二)OLED屏幕
板载1个0.96寸 4pin OLED显示屏模块,内部驱动芯片是SSD1306。
二、 驱动OLED
(一)接线
OLED提供I2C接口,线序如下:
ESP32 OLED
3.3V 3.3V
GND GND
13 SDA
14 SCL
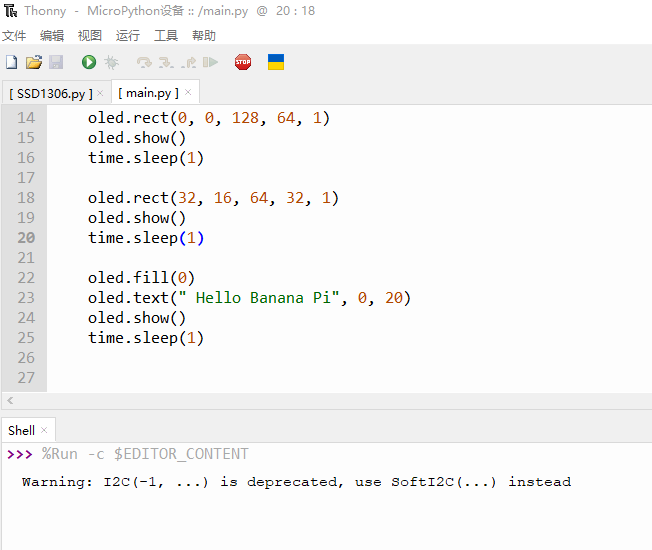
(二)程序
程序基于MicroPython的I2C库, 主要用到了scan(), readfrom(), write()几个函数。
具体实现代码按功能分成2部分,SSD1306.py具体负责OLED的初始化,并提供基础接口供业务使用:
from micropython import const
import framebuf
SET_CONTRAST = const(0x81)
SET_ENTIRE_ON = const(0xA4)
SET_NORM_INV = const(0xA6)
SET_DISP = const(0xAE)
SET_MEM_ADDR = const(0x20)
SET_COL_ADDR = const(0x21)
SET_PAGE_ADDR = const(0x22)
SET_DISP_START_LINE = const(0x40)
SET_SEG_REMAP = const(0xA0)
SET_MUX_RATIO = const(0xA8)
SET_COM_OUT_DIR = const(0xC0)
SET_DISP_OFFSET = const(0xD3)
SET_COM_PIN_CFG = const(0xDA)
SET_DISP_CLK_DIV = const(0xD5)
SET_PRECHARGE = const(0xD9)
SET_VCOM_DESEL = const(0xDB)
SET_CHARGE_PUMP = const(0x8D)
class SSD1306(framebuf.FrameBuffer):
def __init__(self, width, height, external_vcc):
self.width = width
self.height = height
self.external_vcc = external_vcc
self.pages = self.height // 8
self.buffer = bytearray(self.pages * self.width)
super().__init__(self.buffer, self.width, self.height, framebuf.MONO_VLSB)
self.init_display()
def init_display(self):
for cmd in (
SET_DISP,
SET_MEM_ADDR,
0x00,
SET_DISP_START_LINE,
SET_SEG_REMAP | 0x01,
SET_MUX_RATIO,
self.height - 1,
SET_COM_OUT_DIR | 0x08,
SET_DISP_OFFSET,
0x00,
SET_COM_PIN_CFG,
0x02 if self.width > 2 * self.height else 0x12,
SET_DISP_CLK_DIV,
0x80,
SET_PRECHARGE,
0x22 if self.external_vcc else 0xF1,
SET_VCOM_DESEL,
0x30,
SET_CONTRAST,
0xFF,
SET_ENTIRE_ON,
SET_NORM_INV,
SET_CHARGE_PUMP,
0x10 if self.external_vcc else 0x14,
SET_DISP | 0x01,
):
self.write_cmd(cmd)
self.fill(0)
self.show()
def poweroff(self):
self.write_cmd(SET_DISP)
def poweron(self):
self.write_cmd(SET_DISP | 0x01)
def contrast(self, contrast):
self.write_cmd(SET_CONTRAST)
self.write_cmd(contrast)
def invert(self, invert):
self.write_cmd(SET_NORM_INV | (invert & 1))
def rotate(self, rotate):
self.write_cmd(SET_COM_OUT_DIR | ((rotate & 1) << 3))
self.write_cmd(SET_SEG_REMAP | (rotate & 1))
def show(self):
x0 = 0
x1 = self.width - 1
if self.width == 64:
x0 += 32
x1 += 32
self.write_cmd(SET_COL_ADDR)
self.write_cmd(x0)
self.write_cmd(x1)
self.write_cmd(SET_PAGE_ADDR)
self.write_cmd(0)
self.write_cmd(self.pages - 1)
self.write_data(self.buffer)
class SSD1306_I2C(SSD1306):
def __init__(self, width, height, i2c, addr=0x3C, external_vcc=False):
self.i2c = i2c
self.addr = addr
self.temp = bytearray(2)
self.write_list = [b"\x40", None]
super().__init__(width, height, external_vcc)
def write_cmd(self, cmd):
self.temp[0] = 0x80
self.temp[1] = cmd
self.i2c.writeto(self.addr, self.temp)
def write_data(self, buf):
self.write_list[1] = buf
self.i2c.writevto(self.addr, self.write_list)
class SSD1306_SPI(SSD1306):
def __init__(self, width, height, spi, dc, res, cs, external_vcc=False):
self.rate = 10 * 1024 * 1024
dc.init(dc.OUT, value=0)
res.init(res.OUT, value=0)
cs.init(cs.OUT, value=1)
self.spi = spi
self.dc = dc
self.res = res
self.cs = cs
import time
self.res(1)
time.sleep_ms(1)
self.res(0)
time.sleep_ms(10)
self.res(1)
super().__init__(width, height, external_vcc)
def write_cmd(self, cmd):
self.spi.init(baudrate=self.rate, polarity=0, phase=0)
self.cs(1)
self.dc(0)
self.cs(0)
self.spi.write(bytearray([cmd]))
self.cs(1)
def write_data(self, buf):
self.spi.init(baudrate=self.rate, polarity=0, phase=0)
self.cs(1)
self.dc(1)
self.cs(0)
self.spi.write(buf)
self.cs(1)
main.py主要负责业务逻辑。
from machine import I2C,Pin
from SSD1306 import SSD1306_I2C
import time
i2c = I2C(sda=Pin(13), scl=Pin(14))
oled = SSD1306_I2C(128, 64, i2c, addr=0x3c)
while True:
oled.fill(0)
oled.show()
time.sleep(1)
oled.rect(0, 0, 128, 64, 1)
oled.show()
time.sleep(1)
oled.rect(32, 16, 64, 32, 1)
oled.show()
time.sleep(1)
oled.fill(0)
oled.text(" Hello Banana Pi", 0, 20)
oled.show()
time.sleep(1)
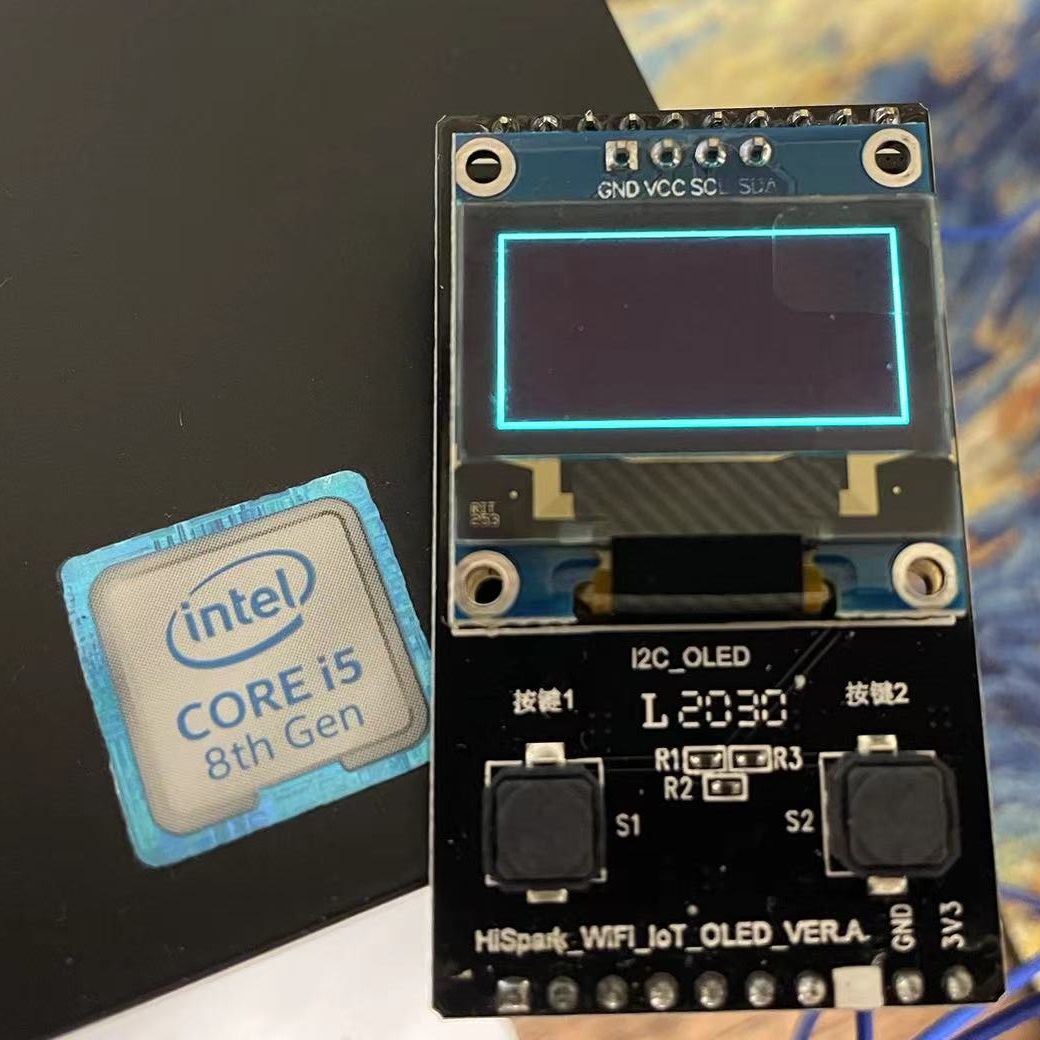
三、运行
将SSD1306.py和main.py通过Thonny上传至Banana Pi,直接执行。
可以看到程序已经执行,具体显示如下图。

最后来个视频,感谢阅读。
 /9
/9 



 工商网监
湘ICP备2023018690号
工商网监
湘ICP备2023018690号





 12926
12926





 淘帖
淘帖 显身卡
显身卡




