搭建标准系统环境
系统要求
- Windows系统要求:Windows10 64位系统。
- Ubuntu系统要求:Ubuntu18.04~21.10版本,内存推荐16 GB及以上。
- Windows系统和Ubuntu系统的用户名不能包含中文字符。
- Windows和Ubuntu上安装的DevEco Device Tool为3.0 Release版本。
安装必要的库和工具
编译OpenHarmony需要一些库和工具,可以通过以下步骤进行安装。
相应操作在Ubuntu环境中进行。
-
使用如下apt-get命令安装后续操作所需的库和工具:
sudo apt-get update && sudo apt-get install binutils binutils-dev git git-lfs gnupg flex bison gperf build-essential zip curl zlib1g-dev gcc-multilib g++-multilib gcc-arm-linux-gnueabi libc6-dev-i386 libc6-dev-amd64 lib32ncurses5-dev x11proto-core-dev libx11-dev lib32z1-dev ccache libgl1-mesa-dev libxml2-utils xsltproc unzip m4 bc gnutls-bin python3.8 python3-pip ruby genext2fs device-tree-compiler make libffi-dev e2fsprogs pkg-config perl openssl libssl-dev libelf-dev libdwarf-dev u-boot-tools mtd-utils cpio doxygen liblz4-tool openjdk-8-jre gcc g++ texinfo dosfstools mtools default-jre default-jdk libncurses5 apt-utils wget scons python3.8-distutils tar rsync git-core libxml2-dev lib32z-dev grsync xxd libglib2.0-dev libpixman-1-dev kmod jfsutils reiserfsprogs xfsprogs squashfs-tools pcmciautils quota ppp libtinfo-dev libtinfo5 libncurses5-dev libncursesw5 libstdc++6 gcc-arm-none-eabi vim ssh locales
 说明: 说明:
以上安装命令适用于Ubuntu18.04,其他版本请根据安装包名称采用对应的安装命令。其中:
- Python要求安装Python 3.8及以上版本,此处以Python 3.8为例。
- Java要求java8及以上版本,此处以java8为例。
-
将python 3.8设置为默认python版本。
查看python 3.8的位置:
which python3.8
将python和python3切换为python3.8:
sudo update-alternatives --install /usr/bin/python python {python3.8 路径} 1 #{python3.8 路径}为上一步查看的python3.8的位置
sudo update-alternatives --install /usr/bin/python3 python3 {python3.8 路径} 1 #{python3.8 路径}为上一步查看的python3.8的位置
安装DevEco Device Tool
通过Windows系统远程访问Ubuntu环境进行烧录等操作,需要先在Windows和Ubuntu下分别安装DevEco Device Tool。
说明:
DevEco Device Tool是OpenHarmony的一站式开发工具,支持源码开发、编译、烧录,调测等,本文主要用其远端链接Ubuntu环境进行烧录和运行。
安装Window版本DevEco Device Tool
-
下载DevEco Device Tool 3.0 Release Windows版。
-
解压DevEco Device Tool压缩包,双击安装包程序,点击Next进行安装。
-
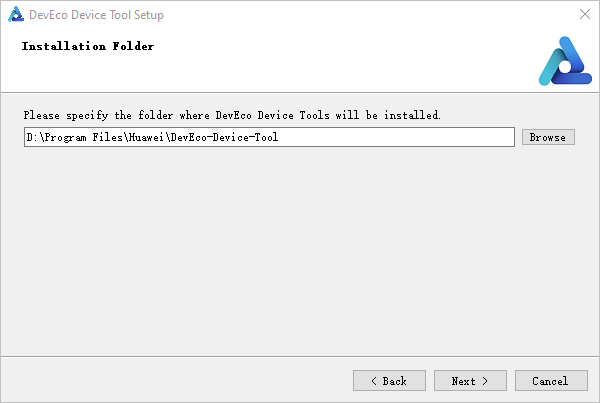
设置DevEco Device Tool的安装路径,请注意安装路径不能包含中文字符,同时建议安装到非系统盘符,点击 Next 。
说明:
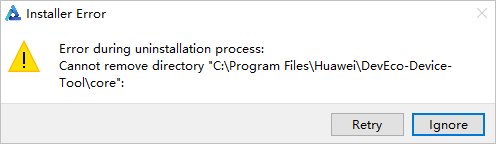
如果您已安装DevEco Device Tool 3.0 Beta2及以前的版本,则在安装新版本时,会先卸载旧版本,卸载过程中出现如下错误提示时,请点击“Ignore”继续安装,该错误不影响新版本的安装。
-
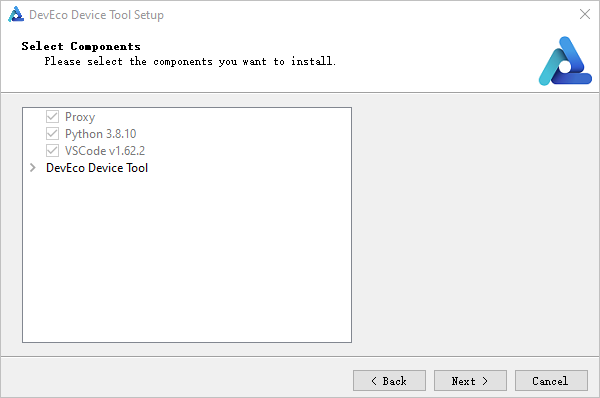
根据安装向导提示,勾选要自动安装的软件。
-
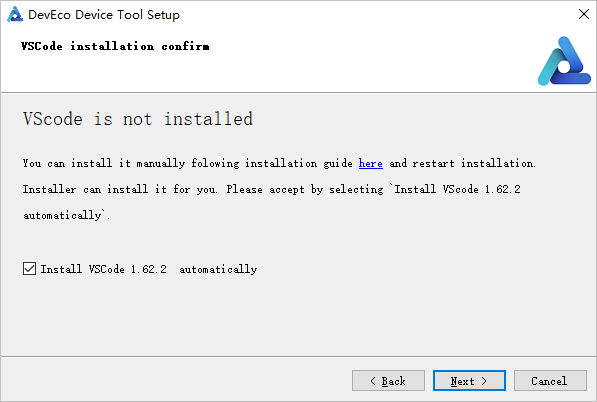
在弹出VSCode installation confirm页面,勾选“Install VScode 1.62.2automatically”,点击 Next 。
说明:
如果检测到Visual Studio Code已安装,且版本为1.62及以上,则会跳过该步骤。
-
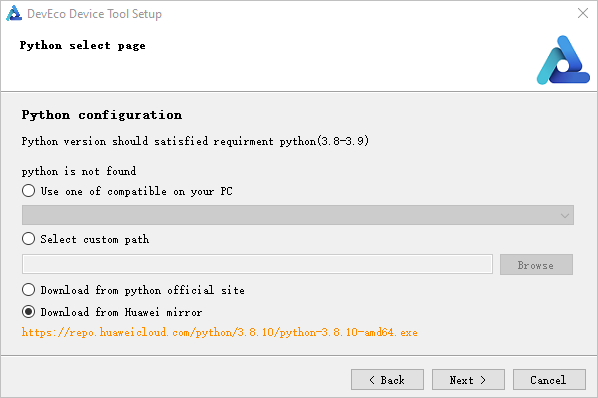
在弹出的Python select page选择“Download from Huawei mirror”,点击 Next 。
说明:
如果系统已安装可兼容的Python版本(Python 3.8~3.9版本),可选择“Use one of compatible on your PC”。
-
在以下界面点击 Next 。
-
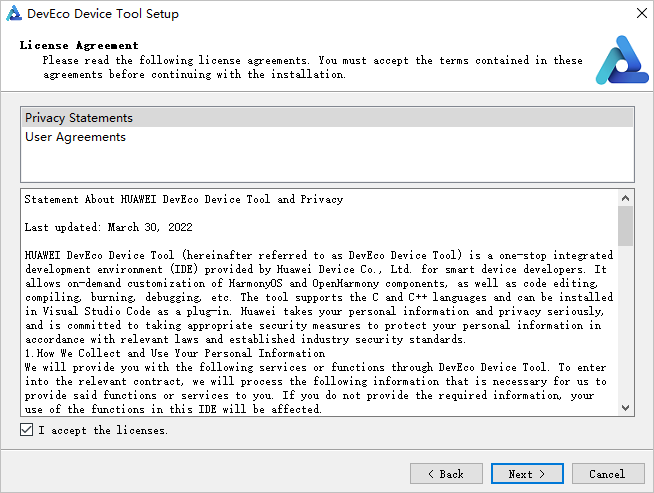
请详细阅读以下界面的用户协议和隐私声明,这里须勾选"I accept the licenses",然后点击Next,安装向导才会继续进行软件下载和安装。
-
继续等待DevEco Device Tool安装向导自动安装DevEco Device Tool插件,直至安装完成,点击 Finish ,关闭DevEco Device Tool安装向导。
-
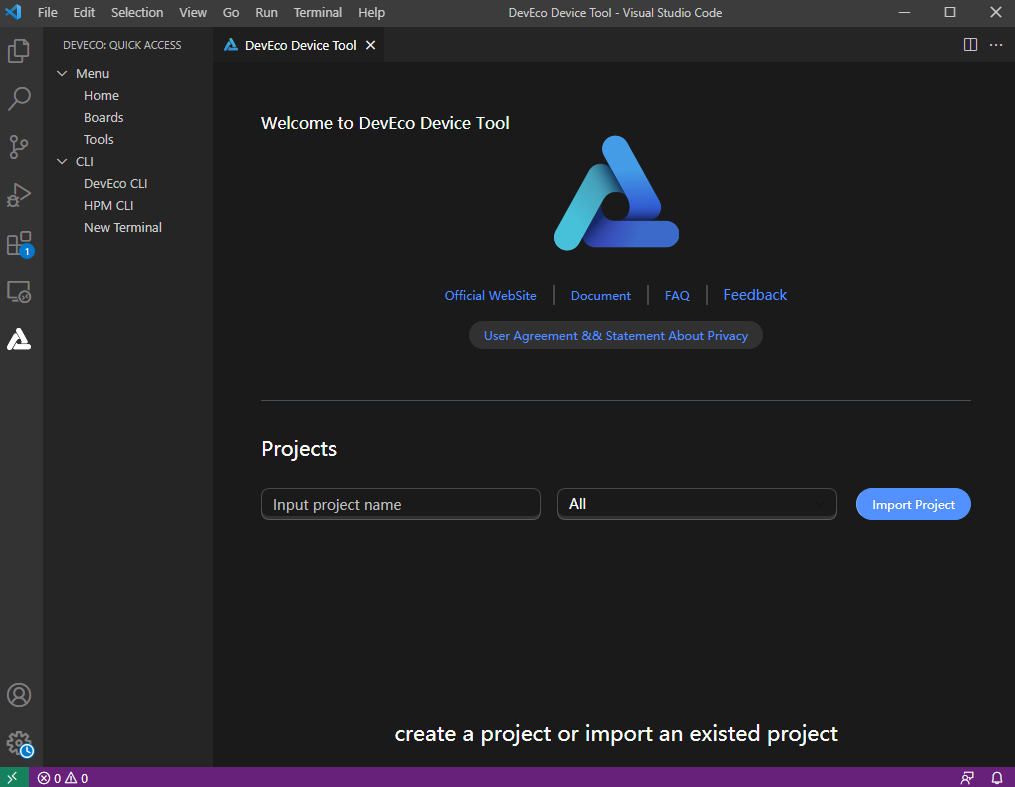
打开Visual Studio Code,进入DevEco Device Tool工具界面。至此,DevEco Device Tool Windows开发环境安装完成。
安装Ubuntu版本DevEco Device Tool
说明:
如果没有Ubuntu系统,可在Windows系统中通过虚拟机方式搭建Ubuntu系统,具体请参考Ubuntu系统安装指导。Ubuntu系统安装完成后,请根据指导完成Ubuntu基础环境配置,然后再根据本章节进行DevEco Device Tool工具的安装。
-
将Ubuntu Shell环境修改为bash。
-
执行如下命令,确认输出结果为bash。如果输出结果不是bash,请根据步骤2,将Ubuntu shell修改为bash。
ls -l /bin/sh

-
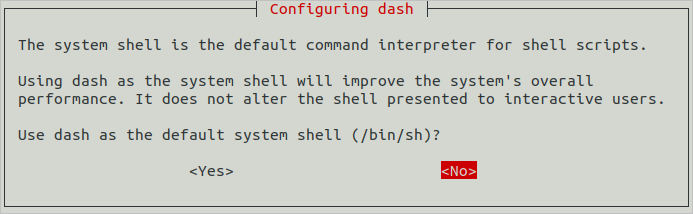
打开终端工具,执行如下命令,输入密码,然后选择 No ,将Ubuntu shell由dash修改为bash。
sudo dpkg-reconfigure dash
-
下载DevEco Device Tool 3.0 Release Linux版本。
-
解压DevEco Device Tool软件包并对解压后的文件夹进行赋权。
-
进入DevEco Device Tool软件包目录,执行如下命令解压软件包,其中devicetool-linux-tool-3.0.0.401.zip为软件包名称,请根据实际进行修改。
unzip devicetool-linux-tool-3.0.0.401.zip
-
进入解压后的文件夹,执行如下命令,赋予安装文件可执行权限,其中devicetool-linux-tool-3.0.0.401.sh请根据实际进行修改。
chmod u+x devicetool-linux-tool-3.0.0.401.sh
-
执行如下命令,安装DevEco Device Tool,其中devicetool-linux-tool-3.0.0.401.sh请根据实际进行修改。
sudo ./devicetool-linux-tool-3.0.0.401.sh
-
在用户协议和隐私声明签署界面,请详细阅读用户协议和隐私声明,需签署同意用户协议和隐私声明才能进行下一步的安装。
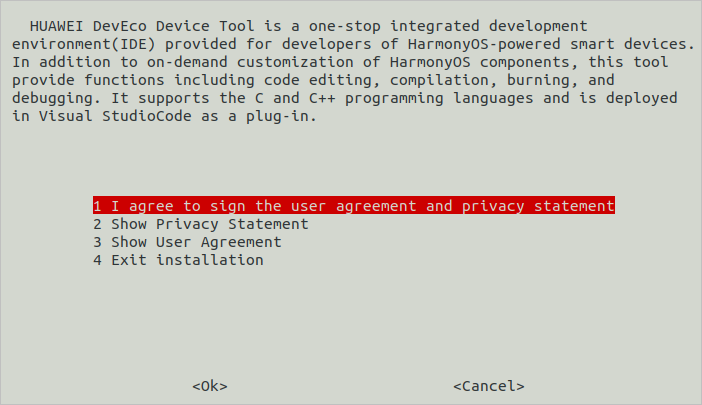
安装完成后,当界面输出“Deveco Device Tool successfully installed.”时,表示DevEco Device Tool安装成功。

配置Windows远程访问Ubuntu环境
安装SSH服务并获取远程访问的IP地址
-
在Ubuntu系统中,打开终端工具,执行如下命令安装SSH服务。
说明:
如果执行该命令失败,提示openssh-server和openssh-client依赖版本不同,请根据CLI界面提示信息,安装openssh-client相应版本后(例如:sudo
apt-get install openssh-client=1:8.2p1-4),再重新执行该命令安装openssh-server。
sudo apt-get install openssh-server
-
执行如下命令,启动SSH服务。
sudo systemctl start ssh
-
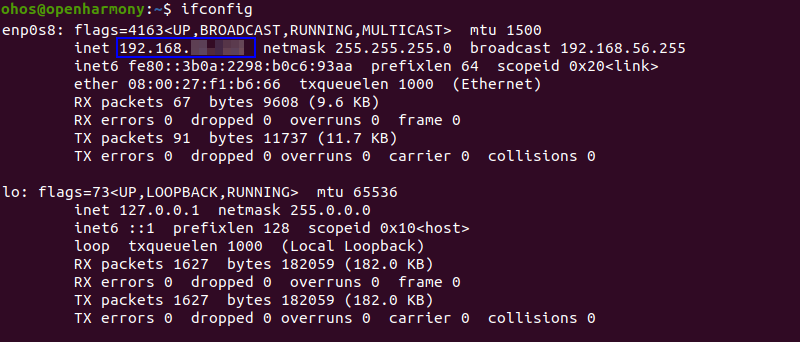
执行如下命令,获取当前用户的IP地址,用于Windows系统远程访问Ubuntu环境。
ifconfig
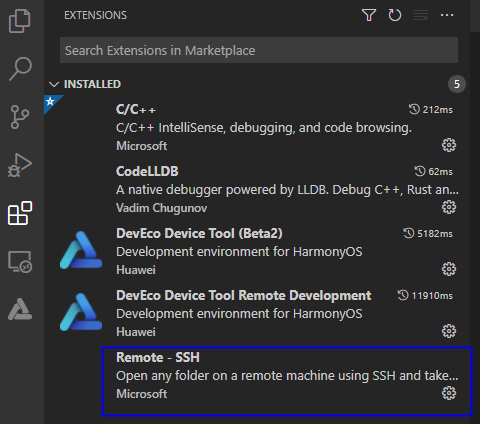
安装Remote SSH
- 打开Windows系统下的Visual Studio Code,点击
 ,在插件市场的搜索输入框中输入“remote-ssh”。 ,在插件市场的搜索输入框中输入“remote-ssh”。
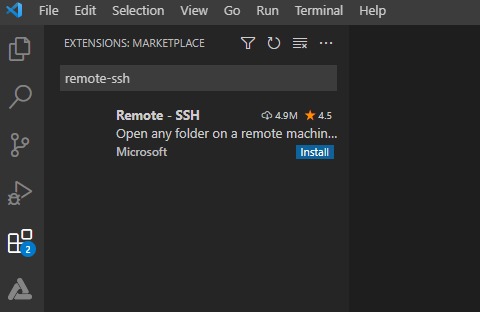
- 点击Remote-SSH的Install按钮,安装Remote-SSH。安装成功后,在INSTALLED下可以看到已安装Remote-SSH。
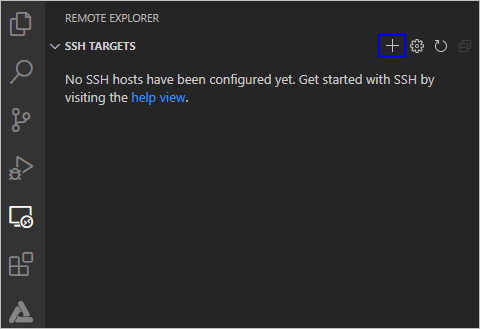
远程连接Ubuntu环境
-
打开Windows系统的Visual Studio Code,点击 ,在REMOTE EXOPLORER页面点击+按钮。 ,在REMOTE EXOPLORER页面点击+按钮。
-
在弹出的SSH连接命令输入框中输入“ssh username @ ip_address ”,其中ip_address为要连接的远程计算机的IP地址,username为登录远程计算机的帐号。

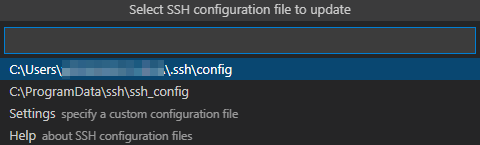
-
在弹出的输入框中,选择SSH configuration文件,选择默认的第一选项即可。
-
在SSH TARGETS中,找到远程计算机,点击 ,打开远程计算机。 ,打开远程计算机。
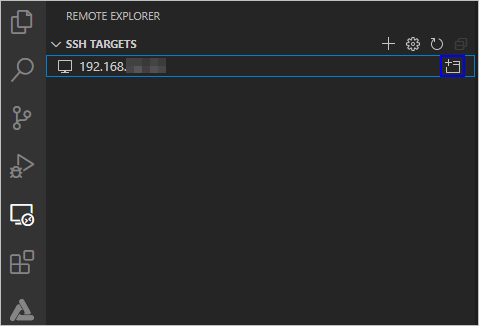
-
在弹出的输入框中,选择 Linux ,然后在选择 Continue ,然后输入登录远程计算机的密码,连接远程计算机 。
说明:
在Windows系统远程访问Ubuntu过程中,需要频繁的输入密码进行连接,为解决该问题,您可以使用SSH公钥来进行设置,设置方法请参考注册远程访问Ubuntu环境的公钥。

连接成功后,等待在远程计算机.vscode-server文件夹下自动安装插件,安装完成后,根据界面提示在Windows系统下重新加载Visual
Studio Code,便可以在Windows的DevEco Device Tool界面进行源码开发、编译、烧录等操作。
获取源码
在Ubuntu环境下通过以下步骤获取OpenHarmony源码。
准备工作
-
注册码云gitee帐号。
-
注册码云SSH公钥,请参考码云帮助中心。
-
安装git客户端和git-lfs。(上述工具已在安装必要的库和工具小节安装。如已安装,请忽略)
更新软件源:
sudo apt-get update
通过以下命令安装:
sudo apt-get install git git-lfs
-
配置用户信息。
git config
git config
git config
-
执行如下命令安装码云repo工具。
下述命令中的安装路径以"~/bin"为例,请用户自行创建所需目录。
mkdir ~/bin
curl https://gitee.com/oschina/repo/raw/fork_flow/repo-py3 -o ~/bin/repo
chmod a+x ~/bin/repo
pip3 install -i https://repo.huaweicloud.com/repository/pypi/simple requests
-
将repo添加到环境变量。
vim ~/.bashrc
export PATH=~/bin:$PATH
source ~/.bashrc
获取方式
说明:
Master主干为开发分支,开发者可通过Master主干获取最新特性。发布分支代码相对比较稳定,开发者可基于发布分支代码进行商用功能开发。
-
OpenHarmony主干代码获取
方式一(推荐):通过repo + ssh下载(需注册公钥,请参考码云帮助中心)。
repo init -u git@gitee.com:openharmony/manifest.git -b master --no-repo-verify
repo sync -c
repo forall -c 'git lfs pull'
方式二:通过repo + https下载。
repo init -u https://gitee.com/openharmony/manifest.git -b master --no-repo-verify
repo sync -c
repo forall -c 'git lfs pull'
-
OpenHarmony发布分支代码获取
OpenHarmony各个版本发布分支的源码获取方式请参考Release-Notes。
执行prebuilts
在源码根目录下执行prebuilts脚本,安装编译器及二进制工具。
bash build/prebuilts_download.sh
安装编译工具
hb是OpenHarmony的编译工具,可通过以下步骤在Ubuntu下进行安装。想要详细了解OpenHarmony编译构建模块功能的开发者可参考编译构建指南。
说明:
如需安装代理,请参考配置代理。
-
运行如下命令安装hb并更新至最新版本
pip3 install --user build/lite
-
设置环境变量
vim ~/.bashrc
将以下命令拷贝到.bashrc文件的最后一行,保存并退出。
export PATH=~/.local/bin:$PATH
执行如下命令更新环境变量。
source ~/.bashrc
-
在源码目录执行"hb -h",界面打印以下信息即表示安装成功:
usage: hb
OHOS build system
positional arguments:
{build,set,env,clean}
build Build source code
set OHOS build settings
env Show OHOS build env
clean Clean output
optional arguments:
-h, --help show this help message and exit
 须知: 须知:
|  /9
/9 



 工商网监
湘ICP备2023018690号
工商网监
湘ICP备2023018690号






 5558
5558 说明:
说明:












 ,在插件市场的搜索输入框中输入“remote-ssh”。
,在插件市场的搜索输入框中输入“remote-ssh”。

 ,在REMOTE EXOPLORER页面点击+按钮。
,在REMOTE EXOPLORER页面点击+按钮。


 ,打开远程计算机。
,打开远程计算机。

 须知:
须知: 淘帖
淘帖 显身卡
显身卡




