URM04简介:
- URM04采用了RS485串行通信总线的架构,支持多传感器的并行工作,有着两个RS-485接口,最多支持32个超声波的并联,
- 内置温度传感器辅助校正距离值,同时支持温度的测量
- 应用场合:移动机器人,停车场,安全检测,超声波空间定位。
性能描述:
- 工作电源:+5V
- 接口方式:RS485 RS485总线通讯,
- 超声波距离测量:
- 最大距离4cm―500cm
- 测量范围角度: 60度
- 芯片型号:Atmel公司的ATmega8芯片 MAX202 MAX485 ST温度测量芯片
测量流程:
1触发超声波与温度测量指令
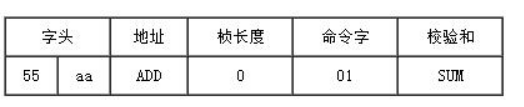 发送指令后,超声波开始测量,温度开始测量,无返回值
2延时30MS
发送指令后,超声波开始测量,温度开始测量,无返回值
2延时30MS
超声波最大测距5米,反射路径10米,声速度331米/秒) 10/331=0.03021 //30MS
3超声波测距读取指令
 测量完一次之后,数据会被存储在ATmega8芯片中,只有发送读取指令,才会有数据返回
返回值:
测量完一次之后,数据会被存储在ATmega8芯片中,只有发送读取指令,才会有数据返回
返回值:
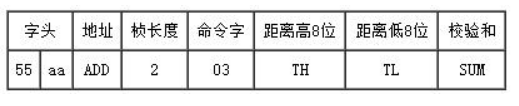
 测量成功返回16位距离数据,两字节0XFF表示测量失败
4温度读取指令:
测量成功返回16位距离数据,两字节0XFF表示测量失败
4温度读取指令:
 与超声波只有命令字节不同
返回值:
与超声波只有命令字节不同
返回值:
调试经验:
1注意超声波要接的是5V,不是3.3V,使用下载器时一般都是3.3V供电,这就导致在线调试没有数据,应该给板子供上电,下载器不供电,超声波接到5V电源口,并且检测下是不是5V.
2.测距时不要距离太近,会导致数据不准确 PS: 太近超声波会有回波干扰
3.超声波测距的性能与被测物表面材料有很大关系,如毛料、布料对超声波 的反射率很小,会严重影响测量结果。
4.测距等待一定的时间,如果超时后依然没有数据返回,就放弃,而进行下一次测量。
4.URM04 V2.0 如果与主板有数据交流,其上的LED灯会一闪一闪的
5.URM04 V2.0 的波特率为固定值19200。或115200
关于这个找了半天发现是在10年七月之后买的都是19200 之前买的都是115200,
 6 UATR接收数据的中断要改!!可以自己根据返回的数据特征做相应处理,或者接受8个字节直接退出
话不多说我们直接看代码:
6 UATR接收数据的中断要改!!可以自己根据返回的数据特征做相应处理,或者接受8个字节直接退出
话不多说我们直接看代码:
超声波数据测量
/*!
* @brief 超声波数据测量
* @since v1.0
* @param device 超声波地址
* @author Z小旋
*/
void MeasureDistance(u8 device) {
int i = 0;
u8 Scmd[6]={0x55,0xaa,0x00,0x00,0x01,0x00}; //触发超声波与温度测量指令
u8 Tcmd[6]={0x55,0xaa,0x00,0x00,0x02,0x00}; //超声波测距读取指令
//SUM效验和
Scmd[2] = device;
Tcmd[2] = device;
Scmd[5] = Scmd[0]+Scmd[1]+Scmd[2]+Scmd[3]+Scmd[4]; //SUM校验和
Tcmd[5] = Tcmd[0]+Tcmd[1]+Tcmd[2]+Tcmd[3]+Tcmd[4]; //SUM校验和
// 触发距离测量。
for(i=0; i<6; i++)
{
USART_SendData(USART1, Scmd
);
while(USART_GetFlagStatus(USART1,USART_FLAG_TC)!=SET);//等待发送结束
}
delay_ms(30); //延时30ms
// 发送命令读取测量距离
for(i=0; i<6; i++)
{
USART_SendData(USART1, Tcmd);
while(USART_GetFlagStatus(USART1,USART_FLAG_TC)!=SET);//等待发送结束
}
delay_ms(3);
}
发送温度就是将Tcmd[4]改为0x03 自行修改即可
超声波ID改变
/*!
* @brief 超声地址改变
* @since v1.0
* @param device 超声波地址
* @return 1 表示成功 0表示失败
* @author Z小旋
*/
int ID_Change(u8 device) {
int i = 0;
u8 data[8];
u8 Scmd[7]={0x55,0xaa,0xAB,0x01,0x55,0x11,0x00}; //触发超声波与温度测量指令
Scmd[5] = device;
for(i=0; i<7; i++)
{
USART_SendData(USART1, Scmd);
while(USART_GetFlagStatus(USART1,USART_FLAG_TC)!=SET);//等待发送结束
Scmd[6] += Scmd;
}
delay_ms(20);
for(i=0; i<10; i++) //获取十位返回数据,检测是否含有0x01
{
if(USART_RX_BUF==0x01)
{
return 1;
}
}
return 0;
}
超声波接收数据
/
/*!
* @brief URM04v2超声波传感器返回测量的距离或温度
* @since v1.0
* @param None
* @return 测量距离 -1表示上次测量超出范围或不成功
* @author Z小旋
*/
int ReadDistance()
{
u8 data[8];
unsigned int temp;
int counter = 0;
int result = -1;
int i = 0,j = 0;
for(i=0;i<200;i++) //数据缓存区最大为200 我们就循环200次
{
if(USART_RX_BUF==0x55&&USART_RX_BUF[i+1]==0xAA) //检测到回复的字头
{
for(j=0; j<8; j++)
{
data[j] = USART_RX_BUF; //获取返回数据
i++;
}
if(data[3] == 2 && data[4] == 2) //如果为距离 桢长度为2 命令字为2
{
// result = (((unsigned int)data[5])<<8))|data[6]; 数据合并 如果需要测到255以上用这个
result = data[6]; //返回所测距离 最大255
}
if(data[3] == 2 && data[4] == 3) //如果为温度 桢长度为2 命令字为3
{
if(data[5]>=0xf0) //高四位都为1 温度为正
{
// result= ((data[5]-0xf0)*256-data[6])/10; //返回所测温度
result= ((unsigned int)(data[5]-0xf0)+data[6])/10; //返回所测温度
}
else 温度为负
{
//result= ((data[5])*256-data[6])/10; //返回所测温度
result= ((unsigned int)(data[5]<<4))|data[6]; //返回所测温度
}
}
USART_RX_STA=0;
return result;
}
else
{
delay_us(250);
counter++;
if(counter==200) //如果50ms还没有数据返回,退出测量并返回-1
{
return result;
}
}
}
}
这里只接收低八位,保证最大能到2.55米 ,如果需要测得远用注释的那行就行,还有很多事,本来想写一套完整库,但是没很多时间,就到这里吧,没有心情去继续完善这个了,万分抱歉,很您可以参考一下,希望能有一点用 ,不足的就是接收数据,需要修改UATR的接收中断的数据处理,我改的不满意,就不上传了
您可以自行修改,还有要注意检测不到数据需要及时退出,不要死等,单片机里最好不要有可能是死循环的存在
void distance()
{
int Distance=0;
MeasureDistance(0x11);
Distance = ReadDistance();
delay_ms(1000);
}
直接调用即可。
URM04简介:
- URM04采用了RS485串行通信总线的架构,支持多传感器的并行工作,有着两个RS-485接口,最多支持32个超声波的并联,
- 内置温度传感器辅助校正距离值,同时支持温度的测量
- 应用场合:移动机器人,停车场,安全检测,超声波空间定位。
性能描述:
- 工作电源:+5V
- 接口方式:RS485 RS485总线通讯,
- 超声波距离测量:
- 最大距离4cm―500cm
- 测量范围角度: 60度
- 芯片型号:Atmel公司的ATmega8芯片 MAX202 MAX485 ST温度测量芯片
测量流程:
1触发超声波与温度测量指令
发送指令后,超声波开始测量,温度开始测量,无返回值
2延时30MS
超声波最大测距5米,反射路径10米,声速度331米/秒) 10/331=0.03021 //30MS
3超声波测距读取指令
测量完一次之后,数据会被存储在ATmega8芯片中,只有发送读取指令,才会有数据返回
返回值:
测量成功返回16位距离数据,两字节0XFF表示测量失败
4温度读取指令:
与超声波只有命令字节不同
返回值:
调试经验:
1注意超声波要接的是5V,不是3.3V,使用下载器时一般都是3.3V供电,这就导致在线调试没有数据,应该给板子供上电,下载器不供电,超声波接到5V电源口,并且检测下是不是5V.
2.测距时不要距离太近,会导致数据不准确 PS: 太近超声波会有回波干扰
3.超声波测距的性能与被测物表面材料有很大关系,如毛料、布料对超声波 的反射率很小,会严重影响测量结果。
4.测距等待一定的时间,如果超时后依然没有数据返回,就放弃,而进行下一次测量。
4.URM04 V2.0 如果与主板有数据交流,其上的LED灯会一闪一闪的
5.URM04 V2.0 的波特率为固定值19200。或115200
关于这个找了半天发现是在10年七月之后买的都是19200 之前买的都是115200,
6 UATR接收数据的中断要改!!可以自己根据返回的数据特征做相应处理,或者接受8个字节直接退出
话不多说我们直接看代码:
超声波数据测量
/*!
* @brief 超声波数据测量
* @since v1.0
* @param device 超声波地址
* @author Z小旋
*/
void MeasureDistance(u8 device) {
int i = 0;
u8 Scmd[6]={0x55,0xaa,0x00,0x00,0x01,0x00}; //触发超声波与温度测量指令
u8 Tcmd[6]={0x55,0xaa,0x00,0x00,0x02,0x00}; //超声波测距读取指令
//SUM效验和
Scmd[2] = device;
Tcmd[2] = device;
Scmd[5] = Scmd[0]+Scmd[1]+Scmd[2]+Scmd[3]+Scmd[4]; //SUM校验和
Tcmd[5] = Tcmd[0]+Tcmd[1]+Tcmd[2]+Tcmd[3]+Tcmd[4]; //SUM校验和
// 触发距离测量。
for(i=0; i<6; i++)
{
USART_SendData(USART1, Scmd
);
while(USART_GetFlagStatus(USART1,USART_FLAG_TC)!=SET);//等待发送结束
}
delay_ms(30); //延时30ms
// 发送命令读取测量距离
for(i=0; i<6; i++)
{
USART_SendData(USART1, Tcmd);
while(USART_GetFlagStatus(USART1,USART_FLAG_TC)!=SET);//等待发送结束
}
delay_ms(3);
}
发送温度就是将Tcmd[4]改为0x03 自行修改即可
超声波ID改变
/*!
* @brief 超声地址改变
* @since v1.0
* @param device 超声波地址
* @return 1 表示成功 0表示失败
* @author Z小旋
*/
int ID_Change(u8 device) {
int i = 0;
u8 data[8];
u8 Scmd[7]={0x55,0xaa,0xAB,0x01,0x55,0x11,0x00}; //触发超声波与温度测量指令
Scmd[5] = device;
for(i=0; i<7; i++)
{
USART_SendData(USART1, Scmd);
while(USART_GetFlagStatus(USART1,USART_FLAG_TC)!=SET);//等待发送结束
Scmd[6] += Scmd;
}
delay_ms(20);
for(i=0; i<10; i++) //获取十位返回数据,检测是否含有0x01
{
if(USART_RX_BUF==0x01)
{
return 1;
}
}
return 0;
}
超声波接收数据
/
/*!
* @brief URM04v2超声波传感器返回测量的距离或温度
* @since v1.0
* @param None
* @return 测量距离 -1表示上次测量超出范围或不成功
* @author Z小旋
*/
int ReadDistance()
{
u8 data[8];
unsigned int temp;
int counter = 0;
int result = -1;
int i = 0,j = 0;
for(i=0;i<200;i++) //数据缓存区最大为200 我们就循环200次
{
if(USART_RX_BUF==0x55&&USART_RX_BUF[i+1]==0xAA) //检测到回复的字头
{
for(j=0; j<8; j++)
{
data[j] = USART_RX_BUF; //获取返回数据
i++;
}
if(data[3] == 2 && data[4] == 2) //如果为距离 桢长度为2 命令字为2
{
// result = (((unsigned int)data[5])<<8))|data[6]; 数据合并 如果需要测到255以上用这个
result = data[6]; //返回所测距离 最大255
}
if(data[3] == 2 && data[4] == 3) //如果为温度 桢长度为2 命令字为3
{
if(data[5]>=0xf0) //高四位都为1 温度为正
{
// result= ((data[5]-0xf0)*256-data[6])/10; //返回所测温度
result= ((unsigned int)(data[5]-0xf0)+data[6])/10; //返回所测温度
}
else 温度为负
{
//result= ((data[5])*256-data[6])/10; //返回所测温度
result= ((unsigned int)(data[5]<<4))|data[6]; //返回所测温度
}
}
USART_RX_STA=0;
return result;
}
else
{
delay_us(250);
counter++;
if(counter==200) //如果50ms还没有数据返回,退出测量并返回-1
{
return result;
}
}
}
}
这里只接收低八位,保证最大能到2.55米 ,如果需要测得远用注释的那行就行,还有很多事,本来想写一套完整库,但是没很多时间,就到这里吧,没有心情去继续完善这个了,万分抱歉,很您可以参考一下,希望能有一点用 ,不足的就是接收数据,需要修改UATR的接收中断的数据处理,我改的不满意,就不上传了
您可以自行修改,还有要注意检测不到数据需要及时退出,不要死等,单片机里最好不要有可能是死循环的存在
void distance()
{
int Distance=0;
MeasureDistance(0x11);
Distance = ReadDistance();
delay_ms(1000);
}
直接调用即可。

 举报
举报




