本文的主角:
内部主板布局 硬件资源:
两个自动回中摇杆、数个微动开关、一个震动马达、一个喇叭、一块锂电(带保护板)、两个蓝牙模块和一个2.4G无线模块,其中两个蓝牙模块的型号分别为BK3431SMA-V2和BK2451,2.4G无线模块型号为BK2425 (封装TSSOP-16),没找到任何资料,问了淘宝上仅有的卖这块芯片三个卖家都说没有资料,有大神找到资料的话希望分享分享。有资料的话可以不改硬件改造成自己的航模遥控器。
线路:
主控是GD32F130C6T6,据说和STM32是pin to pin兼容。粗略测出引脚连接情况如下:
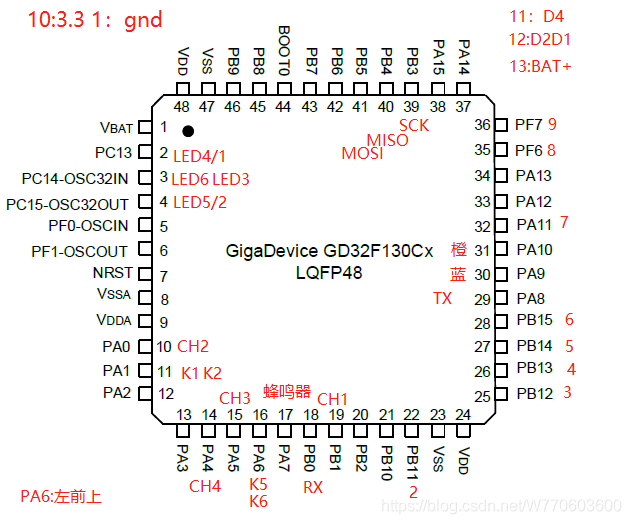 主要用的是摇杆的四个引脚和SPI通讯的引脚,有些引脚不止控制一个元件,需要使用的话要自己测量外部电路,纯数字的标号连接的是CON9的,最左边的1是GND,左往右第10是3.3V。板载3.3V稳压,长得和1117一个样,引脚定义也一样,就当是1117了,按照1117的标准来说BAT+的输入电压要大于3.3+1.5=4.8V,测试过5v可以开机。开机的话可以用原机自带下方的板长按开机,也可以短接CON9的12、13脚开机。
程序烧录
我用ST-LINK V2烧录调试,可以用GD32官方的GDLINK也可以用Jlink。这里以stlink为例,注意SWDAT就是SWDIO。
3.3V————VDD GND————BAT- SWCLK————SWCLK SWDIO————SWDAT
用Keil编程时需要到GD32的官网下载芯片包,建议同时下载数据手册,用库开发的话下载固件库,目前固件库最新的版本是3.1.0。初次烧录程序需要stm32 st-link utility工具解除ReadOutProtection,先点击Connect to the target然后再选择Target->Option Bytes,Read Out Protection选择Level0,Read Out Protection解除,之后可以直接用keil烧录程序了。
摇杆ADC采集
摇杆四个电位器的连接情况:
CH1————PB1 CH2————PA0 CH3————PA5 CH4————PA4
主要用的是摇杆的四个引脚和SPI通讯的引脚,有些引脚不止控制一个元件,需要使用的话要自己测量外部电路,纯数字的标号连接的是CON9的,最左边的1是GND,左往右第10是3.3V。板载3.3V稳压,长得和1117一个样,引脚定义也一样,就当是1117了,按照1117的标准来说BAT+的输入电压要大于3.3+1.5=4.8V,测试过5v可以开机。开机的话可以用原机自带下方的板长按开机,也可以短接CON9的12、13脚开机。
程序烧录
我用ST-LINK V2烧录调试,可以用GD32官方的GDLINK也可以用Jlink。这里以stlink为例,注意SWDAT就是SWDIO。
3.3V————VDD GND————BAT- SWCLK————SWCLK SWDIO————SWDAT
用Keil编程时需要到GD32的官网下载芯片包,建议同时下载数据手册,用库开发的话下载固件库,目前固件库最新的版本是3.1.0。初次烧录程序需要stm32 st-link utility工具解除ReadOutProtection,先点击Connect to the target然后再选择Target->Option Bytes,Read Out Protection选择Level0,Read Out Protection解除,之后可以直接用keil烧录程序了。
摇杆ADC采集
摇杆四个电位器的连接情况:
CH1————PB1 CH2————PA0 CH3————PA5 CH4————PA4
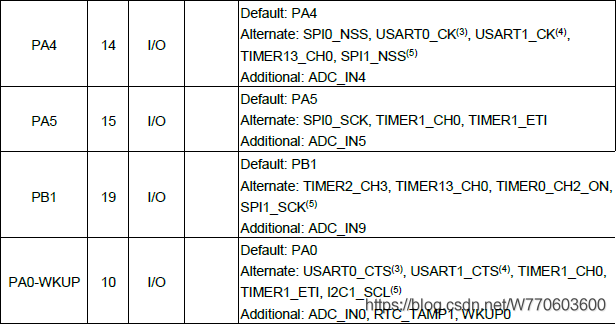 查询数据手册得到对应的ADC通道,要注意的是数据手册的版本要和使用的库的版本要一致,不同版本的内容会有差异。具体代码如下:
查询数据手册得到对应的ADC通道,要注意的是数据手册的版本要和使用的库的版本要一致,不同版本的内容会有差异。具体代码如下:
void ADC_init(void)
{
GPIO_InitPara GPIO_InitStructure;
ADC_InitPara ADC_InitStructure;
DMA_InitPara DMA_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_PIN_1 ;
GPIO_InitStructure.GPIO_Speed = GPIO_SPEED_50MHZ;
GPIO_InitStructure.GPIO_Mode = GPIO_MODE_AN;
GPIO_InitStructure.GPIO_PuPd = GPIO_PUPD_NOPULL;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = (GPIO_PIN_0|GPIO_PIN_4|GPIO_PIN_5);
GPIO_Init(GPIOA, &GPIO_InitStructure);
RCC_AHBPeriphClock_Enable(RCC_AHBPERIPH_DMA1,ENABLE);
RCC_APB2PeriphClock_Enable(RCC_APB2PERIPH_ADC1,ENABLE);
RCC_ADCCLKConfig(RCC_ADCCLK_APB2_DIV6);
DMA_DeInit(DMA1_CHANNEL1);
DMA_InitStructure.DMA_PeripheralBaseAddr = ADC_RDTR_Address;
DMA_InitStructure.DMA_MemoryBaseAddr = (uint32_t)ADC_ConvertedValue;
DMA_InitStructure.DMA_DIR = DMA_DIR_PERIPHERALSRC;
DMA_InitStructure.DMA_BufferSize = 4;
DMA_InitStructure.DMA_PeripheralInc = DMA_PERIPHERALINC_DISABLE;
DMA_InitStructure.DMA_MemoryInc = DMA_MEMORYINC_ENABLE;
DMA_InitStructure.DMA_PeripheralDataSize = DMA_PERIPHERALDATASIZE_HALFWORD;
DMA_InitStructure.DMA_MemoryDataSize = DMA_MEMORYDATASIZE_HALFWORD;
DMA_InitStructure.DMA_Mode = DMA_MODE_CIRCULAR;
DMA_InitStructure.DMA_Priority = DMA_PRIORITY_HIGH;
DMA_InitStructure.DMA_MTOM = DMA_MEMTOMEM_DISABLE;
DMA_Init(DMA1_CHANNEL1, &DMA_InitStructure);
/* Enable DMA1 channel1 */
DMA_Enable(DMA1_CHANNEL1, ENABLE);
ADC_DeInit(&ADC_InitStructure);
ADC_InitStructure.ADC_Mode_Scan = ENABLE;
ADC_InitStructure.ADC_Mode_Continuous = DISABLE;
ADC_InitStructure.ADC_Trig_External = ADC_EXTERNAL_TRIGGER_MODE_NONE;
ADC_InitStructure.ADC_Data_Align = ADC_DATAALIGN_RIGHT;
ADC_InitStructure.ADC_Channel_Number = 4;
ADC_Init(&ADC_InitStructure);
/* ADC regular channels configuration */
ADC_RegularChannel_Config(ADC_CHANNEL_4, 1, ADC_SAMPLETIME_239POINT5);
ADC_RegularChannel_Config(ADC_CHANNEL_5, 2, ADC_SAMPLETIME_239POINT5);
ADC_RegularChannel_Config(ADC_CHANNEL_0, 3, ADC_SAMPLETIME_239POINT5);
ADC_RegularChannel_Config(ADC_CHANNEL_9, 4, ADC_SAMPLETIME_239POINT5);
/* Enable ADC DMA */
ADC_DMA_Enable(ENABLE);
/* Enable ADC */
ADC_Enable(ENABLE);
ADC_Calibration();
/* Start ADC Software Conversion */
ADC_SoftwareStartConv_Enable(ENABLE);
}
串口
板子上有两个串口的四个测试点,分别为UART1和UART3,其中UART3连接到了板载的蓝牙模块,UART1可以用于调试。具体代码如下:
void Usart_Init(void)
{
RCC_AHBPeriphClock_Enable( RCC_AHBPERIPH_GPIOA , ENABLE );
/* Enable USART1 APB clock */
RCC_APB2PeriphClock_Enable( RCC_APB2PERIPH_USART1 , ENABLE );
/* USART1 Pins configuration **************************************************/
GPIO_DeInit( GPIOA );
{
/* Configure the GPIO ports */
GPIO_InitPara GPIO_InitStructure;
/* Connect pin to Periph */
GPIO_PinAFConfig( GPIOA , GPIO_PINSOURCE9, GPIO_AF_1 );
GPIO_PinAFConfig( GPIOA , GPIO_PINSOURCE10, GPIO_AF_1 );
/* Configure pins as AF pushpull */
GPIO_InitStructure.GPIO_Pin = GPIO_PIN_9 | GPIO_PIN_10;
GPIO_InitStructure.GPIO_Mode = GPIO_MODE_AF;
GPIO_InitStructure.GPIO_Speed = GPIO_SPEED_50MHZ;
GPIO_InitStructure.GPIO_OType = GPIO_OTYPE_PP;
GPIO_InitStructure.GPIO_PuPd = GPIO_PUPD_NOPULL;
GPIO_Init( GPIOA , &GPIO_InitStructure);
}
{
USART_InitPara USART_InitStructure;
USART_DeInit( USART1 );
USART_InitStructure.USART_BRR = 115200;
USART_InitStructure.USART_WL = USART_WL_8B;
USART_InitStructure.USART_STBits = USART_STBITS_1;
USART_InitStructure.USART_Parity = USART_PARITY_RESET;
USART_InitStructure.USART_HardwareFlowControl = USART_HARDWAREFLOWCONTROL_NONE;
USART_InitStructure.USART_RxorTx = USART_RXORTX_RX | USART_RXORTX_TX;
USART_Init(USART1, &USART_InitStructure);
}
/* USART enable */
USART_Enable(USART1, ENABLE);
}
void Usart_SendByte(USART_TypeDef * pUSARTx,uint8_t data)
{
USART_DataSend(pUSARTx,data);
while(USART_GetBitState(pUSARTx,USART_FLAG_TBE)==RESET);
}
void Usart_SendString(USART_TypeDef * pUSART,char *str)
{
unsigned int k=0;
do
{
Usart_SendByte(USART1, *(str+k));
k++;
}while(*(str+k)!='�');
while(USART_GetBitState(pUSART,USART_FLAG_TC)==RESET);
}
int fputc(int ch,FILE *f) //重定向之后可以直接用printf函数打印
{
USART_DataSend(USART1,(uint8_t) ch);
while(USART_GetBitState(USART1,USART_FLAG_TBE)==RESET);
return(ch);
}
无线传输SPI
板子上集成了一块BK2425,连接到了MCU的一个硬件SPI上淘宝上说和NRF24L01兼容,不过没有资料,利用不了,如果用的是硬件SPI的话可以推测出三个脚的定义。为了连接NRF24L01,我用了CON9的部分针脚连接,这样不用焊接,较为方便。
用PB13、PB14、PB15对应的硬件SPI,初始化代码如下。
void SPI1_Init(void)
{
/* Initialization GPIO and SPI */
GPIO_InitPara GPIO_InitStructure;
SPI_InitPara SPI_InitStructure;
/* Enable Peripheral clock */
RCC_AHBPeriphClock_Enable( RCC_AHBPERIPH_GPIOA | RCC_AHBPERIPH_GPIOB | RCC_AHBPERIPH_GPIOC , ENABLE);
RCC_APB1PeriphClock_Enable(RCC_APB1PERIPH_SPI2 ,ENABLE);
/* Configure SPI2 pins: */
GPIO_PinAFConfig( GPIOB , GPIO_PINSOURCE13, GPIO_AF_0 );
GPIO_PinAFConfig( GPIOB, GPIO_PINSOURCE14, GPIO_AF_0 );
GPIO_PinAFConfig( GPIOB, GPIO_PINSOURCE15, GPIO_AF_0 );
GPIO_InitStructure.GPIO_Pin = GPIO_PIN_13| GPIO_PIN_14 | GPIO_PIN_15 ;
GPIO_InitStructure.GPIO_Speed = GPIO_SPEED_10MHZ;
GPIO_InitStructure.GPIO_Mode = GPIO_MODE_AF;
GPIO_InitStructure.GPIO_OType = GPIO_OTYPE_PP;
GPIO_InitStructure.GPIO_PuPd = GPIO_PUPD_PULLUP ;
GPIO_Init(GPIOB, &GPIO_InitStructure);
NRF_CSN_HIGH();
/*配置SPI_NRF_SPI的CE引脚,和SPI_NRF_SPI的 CSN 引脚*/
GPIO_InitStructure.GPIO_Pin = NRF_CSN_PIN;
GPIO_InitStructure.GPIO_Speed = GPIO_SPEED_10MHZ;
GPIO_InitStructure.GPIO_OType = GPIO_OTYPE_PP;
GPIO_InitStructure.GPIO_Mode = GPIO_MODE_OUT;
GPIO_InitStructure.GPIO_PuPd = GPIO_PUPD_PULLUP ;
GPIO_Init(NRF_CSN_GPIO_PORT, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = NRF_CE_PIN;
GPIO_InitStructure.GPIO_Speed = GPIO_SPEED_10MHZ;
GPIO_InitStructure.GPIO_OType = GPIO_OTYPE_PP;
GPIO_InitStructure.GPIO_Mode = GPIO_MODE_OUT;
GPIO_InitStructure.GPIO_PuPd = GPIO_PUPD_PULLUP ;
GPIO_Init(NRF_CE_GPIO_PORT, &GPIO_InitStructure);
/* SPI2 configuration */
SPI_InitStructure.SPI_TransType = SPI_TRANSTYPE_FULLDUPLEX;
SPI_InitStructure.SPI_Mode = SPI_MODE_MASTER;;
SPI_InitStructure.SPI_FrameFormat = SPI_FRAMEFORMAT_8BIT;;
SPI_InitStructure.SPI_SCKPL = SPI_SCKPL_LOW ;
SPI_InitStructure.SPI_SCKPH = SPI_SCKPH_1EDGE ;
SPI_InitStructure.SPI_SWNSSEN= SPI_SWNSS_SOFT;
SPI_InitStructure.SPI_PSC = SPI_PSC_8 ;
SPI_InitStructure.SPI_FirstBit = SPI_FIRSTBIT_MSB;;
SPI_InitStructure.SPI_CRCPOL = 7;
SPI_Init(SPI2, &SPI_InitStructure);
SPI_Enable(SPI2,ENABLE);
}
OLED显示屏
可以利用引出的串口两个引脚复用为硬件IIC连接OLED。具体代码可以看整个工程的源码。
存在的问题
到这里ADC和SPI已经能正常使用了,一个四通道的遥控器已经完事了。可以用上顶上的四个微动开关增加通道。存在的问题是MCU一直在复位,我试过将NRST直接接到3.3V,确实不会再复位,但是swd复位不了了,一开始以为是复位电路的问题,折腾了好久断开了复位电路问题依旧。网上查资料说用STLINK烧录都会有这个问题,解决了再更。
本文的主角:
内部主板布局 硬件资源:
两个自动回中摇杆、数个微动开关、一个震动马达、一个喇叭、一块锂电(带保护板)、两个蓝牙模块和一个2.4G无线模块,其中两个蓝牙模块的型号分别为BK3431SMA-V2和BK2451,2.4G无线模块型号为BK2425 (封装TSSOP-16),没找到任何资料,问了淘宝上仅有的卖这块芯片三个卖家都说没有资料,有大神找到资料的话希望分享分享。有资料的话可以不改硬件改造成自己的航模遥控器。
线路:
主控是GD32F130C6T6,据说和STM32是pin to pin兼容。粗略测出引脚连接情况如下:
主要用的是摇杆的四个引脚和SPI通讯的引脚,有些引脚不止控制一个元件,需要使用的话要自己测量外部电路,纯数字的标号连接的是CON9的,最左边的1是GND,左往右第10是3.3V。板载3.3V稳压,长得和1117一个样,引脚定义也一样,就当是1117了,按照1117的标准来说BAT+的输入电压要大于3.3+1.5=4.8V,测试过5v可以开机。开机的话可以用原机自带下方的板长按开机,也可以短接CON9的12、13脚开机。
程序烧录
我用ST-LINK V2烧录调试,可以用GD32官方的GDLINK也可以用Jlink。这里以stlink为例,注意SWDAT就是SWDIO。
3.3V————VDD GND————BAT- SWCLK————SWCLK SWDIO————SWDAT
用Keil编程时需要到GD32的官网下载芯片包,建议同时下载数据手册,用库开发的话下载固件库,目前固件库最新的版本是3.1.0。初次烧录程序需要stm32 st-link utility工具解除ReadOutProtection,先点击Connect to the target然后再选择Target->Option Bytes,Read Out Protection选择Level0,Read Out Protection解除,之后可以直接用keil烧录程序了。
摇杆ADC采集
摇杆四个电位器的连接情况:
CH1————PB1 CH2————PA0 CH3————PA5 CH4————PA4
查询数据手册得到对应的ADC通道,要注意的是数据手册的版本要和使用的库的版本要一致,不同版本的内容会有差异。具体代码如下:
void ADC_init(void)
{
GPIO_InitPara GPIO_InitStructure;
ADC_InitPara ADC_InitStructure;
DMA_InitPara DMA_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_PIN_1 ;
GPIO_InitStructure.GPIO_Speed = GPIO_SPEED_50MHZ;
GPIO_InitStructure.GPIO_Mode = GPIO_MODE_AN;
GPIO_InitStructure.GPIO_PuPd = GPIO_PUPD_NOPULL;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = (GPIO_PIN_0|GPIO_PIN_4|GPIO_PIN_5);
GPIO_Init(GPIOA, &GPIO_InitStructure);
RCC_AHBPeriphClock_Enable(RCC_AHBPERIPH_DMA1,ENABLE);
RCC_APB2PeriphClock_Enable(RCC_APB2PERIPH_ADC1,ENABLE);
RCC_ADCCLKConfig(RCC_ADCCLK_APB2_DIV6);
DMA_DeInit(DMA1_CHANNEL1);
DMA_InitStructure.DMA_PeripheralBaseAddr = ADC_RDTR_Address;
DMA_InitStructure.DMA_MemoryBaseAddr = (uint32_t)ADC_ConvertedValue;
DMA_InitStructure.DMA_DIR = DMA_DIR_PERIPHERALSRC;
DMA_InitStructure.DMA_BufferSize = 4;
DMA_InitStructure.DMA_PeripheralInc = DMA_PERIPHERALINC_DISABLE;
DMA_InitStructure.DMA_MemoryInc = DMA_MEMORYINC_ENABLE;
DMA_InitStructure.DMA_PeripheralDataSize = DMA_PERIPHERALDATASIZE_HALFWORD;
DMA_InitStructure.DMA_MemoryDataSize = DMA_MEMORYDATASIZE_HALFWORD;
DMA_InitStructure.DMA_Mode = DMA_MODE_CIRCULAR;
DMA_InitStructure.DMA_Priority = DMA_PRIORITY_HIGH;
DMA_InitStructure.DMA_MTOM = DMA_MEMTOMEM_DISABLE;
DMA_Init(DMA1_CHANNEL1, &DMA_InitStructure);
/* Enable DMA1 channel1 */
DMA_Enable(DMA1_CHANNEL1, ENABLE);
ADC_DeInit(&ADC_InitStructure);
ADC_InitStructure.ADC_Mode_Scan = ENABLE;
ADC_InitStructure.ADC_Mode_Continuous = DISABLE;
ADC_InitStructure.ADC_Trig_External = ADC_EXTERNAL_TRIGGER_MODE_NONE;
ADC_InitStructure.ADC_Data_Align = ADC_DATAALIGN_RIGHT;
ADC_InitStructure.ADC_Channel_Number = 4;
ADC_Init(&ADC_InitStructure);
/* ADC regular channels configuration */
ADC_RegularChannel_Config(ADC_CHANNEL_4, 1, ADC_SAMPLETIME_239POINT5);
ADC_RegularChannel_Config(ADC_CHANNEL_5, 2, ADC_SAMPLETIME_239POINT5);
ADC_RegularChannel_Config(ADC_CHANNEL_0, 3, ADC_SAMPLETIME_239POINT5);
ADC_RegularChannel_Config(ADC_CHANNEL_9, 4, ADC_SAMPLETIME_239POINT5);
/* Enable ADC DMA */
ADC_DMA_Enable(ENABLE);
/* Enable ADC */
ADC_Enable(ENABLE);
ADC_Calibration();
/* Start ADC Software Conversion */
ADC_SoftwareStartConv_Enable(ENABLE);
}
串口
板子上有两个串口的四个测试点,分别为UART1和UART3,其中UART3连接到了板载的蓝牙模块,UART1可以用于调试。具体代码如下:
void Usart_Init(void)
{
RCC_AHBPeriphClock_Enable( RCC_AHBPERIPH_GPIOA , ENABLE );
/* Enable USART1 APB clock */
RCC_APB2PeriphClock_Enable( RCC_APB2PERIPH_USART1 , ENABLE );
/* USART1 Pins configuration **************************************************/
GPIO_DeInit( GPIOA );
{
/* Configure the GPIO ports */
GPIO_InitPara GPIO_InitStructure;
/* Connect pin to Periph */
GPIO_PinAFConfig( GPIOA , GPIO_PINSOURCE9, GPIO_AF_1 );
GPIO_PinAFConfig( GPIOA , GPIO_PINSOURCE10, GPIO_AF_1 );
/* Configure pins as AF pushpull */
GPIO_InitStructure.GPIO_Pin = GPIO_PIN_9 | GPIO_PIN_10;
GPIO_InitStructure.GPIO_Mode = GPIO_MODE_AF;
GPIO_InitStructure.GPIO_Speed = GPIO_SPEED_50MHZ;
GPIO_InitStructure.GPIO_OType = GPIO_OTYPE_PP;
GPIO_InitStructure.GPIO_PuPd = GPIO_PUPD_NOPULL;
GPIO_Init( GPIOA , &GPIO_InitStructure);
}
{
USART_InitPara USART_InitStructure;
USART_DeInit( USART1 );
USART_InitStructure.USART_BRR = 115200;
USART_InitStructure.USART_WL = USART_WL_8B;
USART_InitStructure.USART_STBits = USART_STBITS_1;
USART_InitStructure.USART_Parity = USART_PARITY_RESET;
USART_InitStructure.USART_HardwareFlowControl = USART_HARDWAREFLOWCONTROL_NONE;
USART_InitStructure.USART_RxorTx = USART_RXORTX_RX | USART_RXORTX_TX;
USART_Init(USART1, &USART_InitStructure);
}
/* USART enable */
USART_Enable(USART1, ENABLE);
}
void Usart_SendByte(USART_TypeDef * pUSARTx,uint8_t data)
{
USART_DataSend(pUSARTx,data);
while(USART_GetBitState(pUSARTx,USART_FLAG_TBE)==RESET);
}
void Usart_SendString(USART_TypeDef * pUSART,char *str)
{
unsigned int k=0;
do
{
Usart_SendByte(USART1, *(str+k));
k++;
}while(*(str+k)!='�');
while(USART_GetBitState(pUSART,USART_FLAG_TC)==RESET);
}
int fputc(int ch,FILE *f) //重定向之后可以直接用printf函数打印
{
USART_DataSend(USART1,(uint8_t) ch);
while(USART_GetBitState(USART1,USART_FLAG_TBE)==RESET);
return(ch);
}
无线传输SPI
板子上集成了一块BK2425,连接到了MCU的一个硬件SPI上淘宝上说和NRF24L01兼容,不过没有资料,利用不了,如果用的是硬件SPI的话可以推测出三个脚的定义。为了连接NRF24L01,我用了CON9的部分针脚连接,这样不用焊接,较为方便。
用PB13、PB14、PB15对应的硬件SPI,初始化代码如下。
void SPI1_Init(void)
{
/* Initialization GPIO and SPI */
GPIO_InitPara GPIO_InitStructure;
SPI_InitPara SPI_InitStructure;
/* Enable Peripheral clock */
RCC_AHBPeriphClock_Enable( RCC_AHBPERIPH_GPIOA | RCC_AHBPERIPH_GPIOB | RCC_AHBPERIPH_GPIOC , ENABLE);
RCC_APB1PeriphClock_Enable(RCC_APB1PERIPH_SPI2 ,ENABLE);
/* Configure SPI2 pins: */
GPIO_PinAFConfig( GPIOB , GPIO_PINSOURCE13, GPIO_AF_0 );
GPIO_PinAFConfig( GPIOB, GPIO_PINSOURCE14, GPIO_AF_0 );
GPIO_PinAFConfig( GPIOB, GPIO_PINSOURCE15, GPIO_AF_0 );
GPIO_InitStructure.GPIO_Pin = GPIO_PIN_13| GPIO_PIN_14 | GPIO_PIN_15 ;
GPIO_InitStructure.GPIO_Speed = GPIO_SPEED_10MHZ;
GPIO_InitStructure.GPIO_Mode = GPIO_MODE_AF;
GPIO_InitStructure.GPIO_OType = GPIO_OTYPE_PP;
GPIO_InitStructure.GPIO_PuPd = GPIO_PUPD_PULLUP ;
GPIO_Init(GPIOB, &GPIO_InitStructure);
NRF_CSN_HIGH();
/*配置SPI_NRF_SPI的CE引脚,和SPI_NRF_SPI的 CSN 引脚*/
GPIO_InitStructure.GPIO_Pin = NRF_CSN_PIN;
GPIO_InitStructure.GPIO_Speed = GPIO_SPEED_10MHZ;
GPIO_InitStructure.GPIO_OType = GPIO_OTYPE_PP;
GPIO_InitStructure.GPIO_Mode = GPIO_MODE_OUT;
GPIO_InitStructure.GPIO_PuPd = GPIO_PUPD_PULLUP ;
GPIO_Init(NRF_CSN_GPIO_PORT, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = NRF_CE_PIN;
GPIO_InitStructure.GPIO_Speed = GPIO_SPEED_10MHZ;
GPIO_InitStructure.GPIO_OType = GPIO_OTYPE_PP;
GPIO_InitStructure.GPIO_Mode = GPIO_MODE_OUT;
GPIO_InitStructure.GPIO_PuPd = GPIO_PUPD_PULLUP ;
GPIO_Init(NRF_CE_GPIO_PORT, &GPIO_InitStructure);
/* SPI2 configuration */
SPI_InitStructure.SPI_TransType = SPI_TRANSTYPE_FULLDUPLEX;
SPI_InitStructure.SPI_Mode = SPI_MODE_MASTER;;
SPI_InitStructure.SPI_FrameFormat = SPI_FRAMEFORMAT_8BIT;;
SPI_InitStructure.SPI_SCKPL = SPI_SCKPL_LOW ;
SPI_InitStructure.SPI_SCKPH = SPI_SCKPH_1EDGE ;
SPI_InitStructure.SPI_SWNSSEN= SPI_SWNSS_SOFT;
SPI_InitStructure.SPI_PSC = SPI_PSC_8 ;
SPI_InitStructure.SPI_FirstBit = SPI_FIRSTBIT_MSB;;
SPI_InitStructure.SPI_CRCPOL = 7;
SPI_Init(SPI2, &SPI_InitStructure);
SPI_Enable(SPI2,ENABLE);
}
OLED显示屏
可以利用引出的串口两个引脚复用为硬件IIC连接OLED。具体代码可以看整个工程的源码。
存在的问题
到这里ADC和SPI已经能正常使用了,一个四通道的遥控器已经完事了。可以用上顶上的四个微动开关增加通道。存在的问题是MCU一直在复位,我试过将NRST直接接到3.3V,确实不会再复位,但是swd复位不了了,一开始以为是复位电路的问题,折腾了好久断开了复位电路问题依旧。网上查资料说用STLINK烧录都会有这个问题,解决了再更。

 举报
举报




