黄工无刷电机学习
登录
直播中
笑过就走
10年用户
991经验值
擅长:可编程逻辑 电源/新能源 MEMS/传感技术
私信
关注
[问答]
位置式PID与增量式PID的区别在哪?
开启该帖子的消息推送
增量式
PID
什么是PID?PID控制器主要有哪些应用?
位置式PID与增量式PID的区别在哪?
位置式PID优缺点有哪些?
增量式PID优缺点有哪些?
回帖
(1)
高志新
2021-7-13 10:56:22
(1)什么是PID:
PID 控制器以各种形式使用超过了 1 世纪,广泛应用在机械设备、气动设备 和电子设备。
在工业应用中PID及其衍生算法是应用最广泛的算法之一,是当之无愧的万能算法。
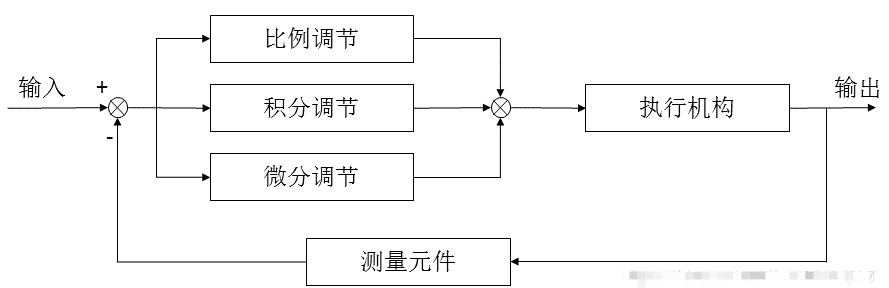
PID 实指“比例 proportional”、“积分 integral”、“微分 derivative”,这三项构 成 PID 基本要素。
每一项完成不同任务,对系统功能产生不同的影响。它的结构简单,参数易 于调整,是控制系统中经常采用的控制算法。
(2)位置式PID与增量式PID
PID控制公式
其中:
u(t) 为控制器输出的控制量;(输出)
e(t)为偏差信号,它等于给定量与输出量之差;(输入)
KP 为比例系数;(对应参数 P)
TI 为积分时间常数;(对应参数I)
TD 为微分时间常数。(对应参数 D)
数字 PID 控制算法通常分为位置式 PID 控制算法和增量式 PID 控制算法。
位置式 PID:
e(k): 用户设定的值(目标值) - 控制对象的当前的状态值
比例P : e(k)
积分I : ∑e(i) 误差的累加
微分D : e(k) - e(k-1) 这次误差-上次误差
也就是位置式PID是当前系统的实际位置,与你想要达到的预期位置的偏差,进行PID控制。因为有误差积分 ∑e(i),一直累加,
也就是当前的输出u(k)与过去的所有状态都有关系,用到了误差的累加值;(误差e会有误差累加),输出的u(k)对应的是执行机构的实际位置,
一旦控制输出出错(控制对象的当前的状态值出现问题 ),u(k)的大幅变化会引起系统的大幅变化。
并且位置式PID在积分项达到饱和时,误差仍然会在积分作用下继续累积,一旦误差开始反向变化,系统需要一定时间从饱和区退出,
所以在u(k)达到最大和最小时,要停止积分作用,并且要有积分限幅和输出限幅。所以在使用位置式PID时,一般我们直接使用PD控制。
增量式 PID:
比例P : e(k)-e(k-1) 这次误差-上次误差 积分I : e(i)
误差 微分D : e(k) - 2e(k-1)+e(k-2) 这次误差-2*上次误差+上上次误差
增量式PID根据公式可以很好地看出,一旦确定了 KP、TI 、TD,只要使用前后三次测量值的偏差, 即可由公式求出控制增量。
而得出的控制量▲u(k)对应的是近几次位置误差的增量,而不是对应与实际位置的偏差 没有误差累加
也就是说,增量式PID中不需要累加。控制增量Δu(k)的确定仅与最近3次的采样值有关,容易通过加权处理获得比较好的控制效果,并且在系统发生问题时,增量式不会严重影响系统的工作
增量型 PID,是对位置型 PID 取增量,这时控制器输出的是相邻两次采样时刻所计算的位置值之差,得到的结果是增量,即在上一次的控制量的基础上需要增加(负值意味减少)控制量。
(3)位置式PID与增量式PID的区别
1: 增量式算法不需要做累加,控制量增量的确定仅与最近几次偏差采样值有关,计算误差对控制 量计算的影响较小。
而位置式算法要用到过去偏差的累加值,容易产生较大的累加误差。
2: 增量式算法得出的是控制量的增量,例如在阀门控制中,只输出阀门开度的变化部分,误动作
影响小,必要时还可通过逻辑判断限制或禁止本次输出,不会严重影响系统的工作。
而位置式的输出直接对应对象的输出,因此对系统影响较大。
3 增量式PID控制输出的是控制量增量,并无积分作用,因此该方法适用于执行机构带积分部件的对象,如步进电机等,
而位置式PID适用于执行机构不带积分部件的对象,如电液伺服阀。
4 在进行PID控制时,位置式PID需要有积分限幅和输出限幅,而增量式PID只需输出限幅
位置式PID优缺点:
优点:
①位置式PID是一种非递推式算法,可直接控制执行机构(如平衡小车),u(k)的值和执行机构的实际位置(如小车当前角度)是一一对应的,因此在执行机构不带积分部件的对象中可以很好应用
缺点:
①每次输出均与过去的状态有关,计算时要对e(k)进行累加,运算工作量大。
增量式PID优缺点:
优点:
①误动作时影响小,必要时可用逻辑判断的方法去掉出错数据。
②手动/自动切换时冲击小,便于实现无扰动切换。当计算机故障时,仍能保持原值。
③算式中不需要累加。控制增量Δu(k)的确定仅与最近3次的采样值有关。
缺点:
①积分截断效应大,有稳态误差;
②溢出的影响大。有的被控对象用增量式则不太好;
(4)位置式PID与增量式PID的代码
```ctypedef struct{ __IO float SetPoint; // 设定目标 Desired Value __IO float SumError; // 误差累计 __IO float Proportion; // 比例常数 Proportional Const __IO float Integral; // 积分常数 Integral Const __IO float Derivative; // 微分常数 Derivative Const __IO float LastError; // Error[-1] __IO float PrevError; // Error[-2]}PID_TypeDef;/* PID结构体 */extern PID_TypeDef cPID,sPID,lPID; // PID参数结构体//位置式PID pwm=Kp*e(k)+Ki*∑e(k)+Kd[e(k)-e(k-1)]static float CurPIDCalc(float NextPoint){ float iError = cPID.SetPoint - NextPoint; //偏差 if((iError 》= -1) && (iError 《= 1)) iError = 0; // 设定闭环死区 |e| 《 mA,不做调整 cPID.SumError += iError; //积分 if( cPID.SumError 》= 5200) cPID.SumError = 5200; if( cPID.SumError 《= -5200) cPID.SumError =-5200; float dError = iError - cPID.LastError; //微分 cPID.LastError = iError; //更新参数 return (float)( cPID.Proportion * (float)iError //比例项 Kp*e(k) + cPID.Integral * (float)cPID.SumError //积分项 ki*∑e(k) + cPID.Derivative * (float)dError ); //微分项 Kd[e(k)-e(k-1)]}//增量式PID inc= Kp[ e(k)-e(k-1)] + Ki*e(k) + Kd*[e(k)-2e(k-1)+e(k-2)]static float LocPIDCalc (float NextPoint){ float iError = lPID.SetPoint - NextPoint; //偏差 float Increase = lPID.Proportion * ( iError - lPID.LastError ) // Kp[ e(k)-e(k-1)] + lPID.Integral * ( iError ) // Ki*e(k) + lPID.Derivative *(iError - 2.0*lPID.LastError + lPID.PrevError ); // Kd*[e(k)-2e(k-1)+e(k-2)] lPID.PrevError=lPID.LastError; lPID.LastError=iError; return Increase;}
(1)什么是PID:
PID 控制器以各种形式使用超过了 1 世纪,广泛应用在机械设备、气动设备 和电子设备。
在工业应用中PID及其衍生算法是应用最广泛的算法之一,是当之无愧的万能算法。
PID 实指“比例 proportional”、“积分 integral”、“微分 derivative”,这三项构 成 PID 基本要素。
每一项完成不同任务,对系统功能产生不同的影响。它的结构简单,参数易 于调整,是控制系统中经常采用的控制算法。
(2)位置式PID与增量式PID
PID控制公式
其中:
u(t) 为控制器输出的控制量;(输出)
e(t)为偏差信号,它等于给定量与输出量之差;(输入)
KP 为比例系数;(对应参数 P)
TI 为积分时间常数;(对应参数I)
TD 为微分时间常数。(对应参数 D)
数字 PID 控制算法通常分为位置式 PID 控制算法和增量式 PID 控制算法。
位置式 PID:
e(k): 用户设定的值(目标值) - 控制对象的当前的状态值
比例P : e(k)
积分I : ∑e(i) 误差的累加
微分D : e(k) - e(k-1) 这次误差-上次误差
也就是位置式PID是当前系统的实际位置,与你想要达到的预期位置的偏差,进行PID控制。因为有误差积分 ∑e(i),一直累加,
也就是当前的输出u(k)与过去的所有状态都有关系,用到了误差的累加值;(误差e会有误差累加),输出的u(k)对应的是执行机构的实际位置,
一旦控制输出出错(控制对象的当前的状态值出现问题 ),u(k)的大幅变化会引起系统的大幅变化。
并且位置式PID在积分项达到饱和时,误差仍然会在积分作用下继续累积,一旦误差开始反向变化,系统需要一定时间从饱和区退出,
所以在u(k)达到最大和最小时,要停止积分作用,并且要有积分限幅和输出限幅。所以在使用位置式PID时,一般我们直接使用PD控制。
增量式 PID:
比例P : e(k)-e(k-1) 这次误差-上次误差 积分I : e(i)
误差 微分D : e(k) - 2e(k-1)+e(k-2) 这次误差-2*上次误差+上上次误差
增量式PID根据公式可以很好地看出,一旦确定了 KP、TI 、TD,只要使用前后三次测量值的偏差, 即可由公式求出控制增量。
而得出的控制量▲u(k)对应的是近几次位置误差的增量,而不是对应与实际位置的偏差 没有误差累加
也就是说,增量式PID中不需要累加。控制增量Δu(k)的确定仅与最近3次的采样值有关,容易通过加权处理获得比较好的控制效果,并且在系统发生问题时,增量式不会严重影响系统的工作
增量型 PID,是对位置型 PID 取增量,这时控制器输出的是相邻两次采样时刻所计算的位置值之差,得到的结果是增量,即在上一次的控制量的基础上需要增加(负值意味减少)控制量。
(3)位置式PID与增量式PID的区别
1: 增量式算法不需要做累加,控制量增量的确定仅与最近几次偏差采样值有关,计算误差对控制 量计算的影响较小。
而位置式算法要用到过去偏差的累加值,容易产生较大的累加误差。
2: 增量式算法得出的是控制量的增量,例如在阀门控制中,只输出阀门开度的变化部分,误动作
影响小,必要时还可通过逻辑判断限制或禁止本次输出,不会严重影响系统的工作。
而位置式的输出直接对应对象的输出,因此对系统影响较大。
3 增量式PID控制输出的是控制量增量,并无积分作用,因此该方法适用于执行机构带积分部件的对象,如步进电机等,
而位置式PID适用于执行机构不带积分部件的对象,如电液伺服阀。
4 在进行PID控制时,位置式PID需要有积分限幅和输出限幅,而增量式PID只需输出限幅
位置式PID优缺点:
优点:
①位置式PID是一种非递推式算法,可直接控制执行机构(如平衡小车),u(k)的值和执行机构的实际位置(如小车当前角度)是一一对应的,因此在执行机构不带积分部件的对象中可以很好应用
缺点:
①每次输出均与过去的状态有关,计算时要对e(k)进行累加,运算工作量大。
增量式PID优缺点:
优点:
①误动作时影响小,必要时可用逻辑判断的方法去掉出错数据。
②手动/自动切换时冲击小,便于实现无扰动切换。当计算机故障时,仍能保持原值。
③算式中不需要累加。控制增量Δu(k)的确定仅与最近3次的采样值有关。
缺点:
①积分截断效应大,有稳态误差;
②溢出的影响大。有的被控对象用增量式则不太好;
(4)位置式PID与增量式PID的代码
```ctypedef struct{ __IO float SetPoint; // 设定目标 Desired Value __IO float SumError; // 误差累计 __IO float Proportion; // 比例常数 Proportional Const __IO float Integral; // 积分常数 Integral Const __IO float Derivative; // 微分常数 Derivative Const __IO float LastError; // Error[-1] __IO float PrevError; // Error[-2]}PID_TypeDef;/* PID结构体 */extern PID_TypeDef cPID,sPID,lPID; // PID参数结构体//位置式PID pwm=Kp*e(k)+Ki*∑e(k)+Kd[e(k)-e(k-1)]static float CurPIDCalc(float NextPoint){ float iError = cPID.SetPoint - NextPoint; //偏差 if((iError 》= -1) && (iError 《= 1)) iError = 0; // 设定闭环死区 |e| 《 mA,不做调整 cPID.SumError += iError; //积分 if( cPID.SumError 》= 5200) cPID.SumError = 5200; if( cPID.SumError 《= -5200) cPID.SumError =-5200; float dError = iError - cPID.LastError; //微分 cPID.LastError = iError; //更新参数 return (float)( cPID.Proportion * (float)iError //比例项 Kp*e(k) + cPID.Integral * (float)cPID.SumError //积分项 ki*∑e(k) + cPID.Derivative * (float)dError ); //微分项 Kd[e(k)-e(k-1)]}//增量式PID inc= Kp[ e(k)-e(k-1)] + Ki*e(k) + Kd*[e(k)-2e(k-1)+e(k-2)]static float LocPIDCalc (float NextPoint){ float iError = lPID.SetPoint - NextPoint; //偏差 float Increase = lPID.Proportion * ( iError - lPID.LastError ) // Kp[ e(k)-e(k-1)] + lPID.Integral * ( iError ) // Ki*e(k) + lPID.Derivative *(iError - 2.0*lPID.LastError + lPID.PrevError ); // Kd*[e(k)-2e(k-1)+e(k-2)] lPID.PrevError=lPID.LastError; lPID.LastError=iError; return Increase;}
举报
更多回帖
rotate(-90deg);
回复
相关问答
增量式
PID
位置
式
PID
和
增量
式
PID
区别
是什么?
2023-10-26
532
请问一下STM MCSDK_v5.3.2的
PID
(PI_Controller() function)是
增量
式
PID
或
位置
式
PID
?
2024-04-22
599
请问如何调节
增量
式
pid
?
2023-11-09
615
PID
控制舵机使平衡杆平衡,是用
位置
式
还是
增量
式
?
2018-10-16
4805
请问是用
位置
式
PID
好还是
增量
式
PID
好?
2019-10-29
11305
如何去实现基于stm32的
PID
算法
增量
式
程序呢
2021-12-02
2276
PID
请教
2017-08-22
1721
串级
PID
比单级
PID
区别在哪
里?
2023-10-16
719
请问Foc中的
PID
用的是
增量
PID
还是
位置
PID
?
2018-07-28
7725
求大佬分享
位置
式
PID
代码
2022-01-21
1138
发帖
登录/注册
20万+
工程师都在用,
免费
PCB检查工具
无需安装、支持浏览器和手机在线查看、实时共享
查看
点击登录
登录更多精彩功能!
首页
论坛版块
小组
免费开发板试用
ebook
直播
搜索
登录
×
20
完善资料,
赚取积分


 举报
举报



