实验材料
TPYBoard开发板1块(能跑python语言的开发板,小车的大脑。)
四路红外感应探头(小车的眼睛)。
数据线一根。
充电宝一个(给整个系统供电)。
智能小车底盘(包括驱动模块)。
杜邦线若干。
实验目的和实验材料准备齐了,先来介绍一下各个主要部件。
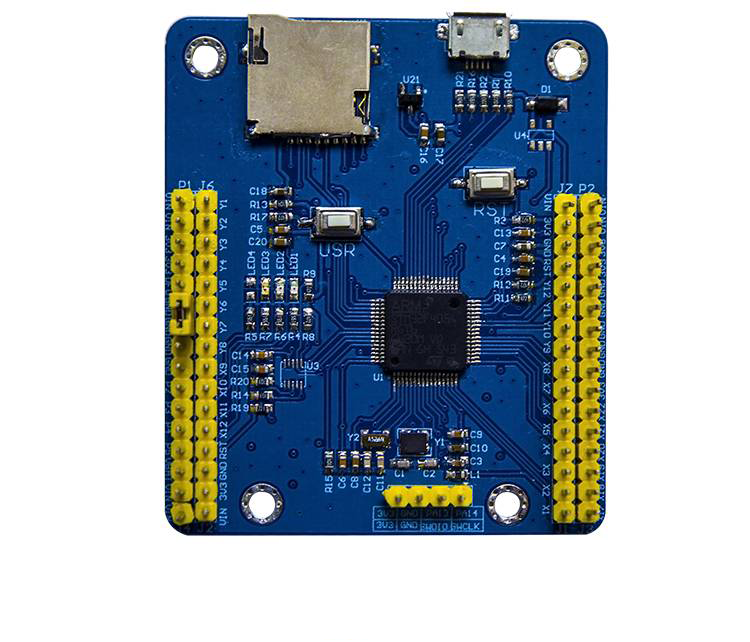
2.1PYBoard开发板
MicroPython是在单片机上可以跑的Python,也就是说,你可以通过Python脚本语言开发单片机程序。由剑桥大学的理论物理学家乔治·达明设计。和Arduino类似,但MicroPython更强大。MicroPython开发板让你可以通过Python代码轻松控制微控制器的各种外设,比如LED等,读取管脚电压,播放歌曲,和其他设备联网等等。TPYBoard是TurnipSmart公司制作的一款MicroPython开发板,这款开发板运行很流畅,关键是价格很便宜。
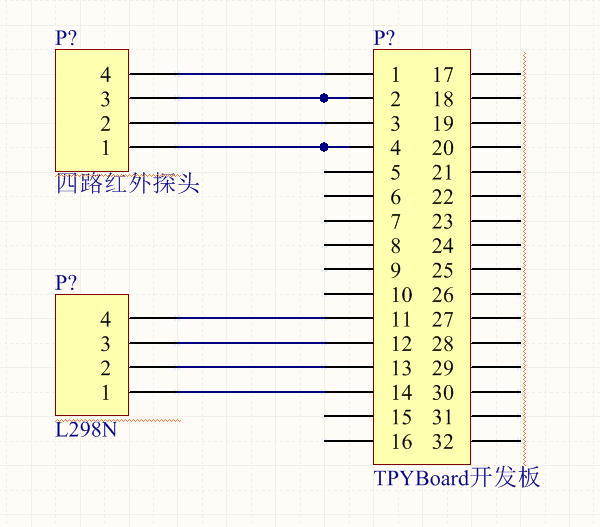
2.2四路红外感应探头
1、当模块检测到前方障碍物信号时,电路板上红色指示灯点亮,同时OUT端口持续输出低电平信号,该模块检测距离2~60cm,检测角度35°,检测距离可以通过电位器进行调节,顺时针调电位器,检测距离增加;逆时针调电位器,检测距离减少。
2、传感器属于红外线反射探测,因此目标的反射率和形状是探测距离的关键。其中黑色探测距离最小,白色最大;小面积物体距离小,大面积距离大。
3、传感器模块输出端口OUT可直接与单片机IO口连接即可,也可以直接驱动一个5V继电器模块或者蜂鸣器模块;连接方式:VCC-VCC;GND-GND;OUT-IO
4、比较器采用LM339,工作稳定;
5、可采用3.3V-5V直流电源对模块进行供电。当电源接通时,绿色电源指示灯点亮。
2.3智能小车底盘
双电机驱动,万向轮改变方向。这是实验中最常用到的小车底盘,使用差速的方法进行转弯。配合使用L298N电机驱动模块,使用方法很简单,不多做介绍。
实验材料
TPYBoard开发板1块(能跑python语言的开发板,小车的大脑。)
四路红外感应探头(小车的眼睛)。
数据线一根。
充电宝一个(给整个系统供电)。
智能小车底盘(包括驱动模块)。
杜邦线若干。
实验目的和实验材料准备齐了,先来介绍一下各个主要部件。
2.1PYBoard开发板
MicroPython是在单片机上可以跑的Python,也就是说,你可以通过Python脚本语言开发单片机程序。由剑桥大学的理论物理学家乔治·达明设计。和Arduino类似,但MicroPython更强大。MicroPython开发板让你可以通过Python代码轻松控制微控制器的各种外设,比如LED等,读取管脚电压,播放歌曲,和其他设备联网等等。TPYBoard是TurnipSmart公司制作的一款MicroPython开发板,这款开发板运行很流畅,关键是价格很便宜。
2.2四路红外感应探头
1、当模块检测到前方障碍物信号时,电路板上红色指示灯点亮,同时OUT端口持续输出低电平信号,该模块检测距离2~60cm,检测角度35°,检测距离可以通过电位器进行调节,顺时针调电位器,检测距离增加;逆时针调电位器,检测距离减少。
2、传感器属于红外线反射探测,因此目标的反射率和形状是探测距离的关键。其中黑色探测距离最小,白色最大;小面积物体距离小,大面积距离大。
3、传感器模块输出端口OUT可直接与单片机IO口连接即可,也可以直接驱动一个5V继电器模块或者蜂鸣器模块;连接方式:VCC-VCC;GND-GND;OUT-IO
4、比较器采用LM339,工作稳定;
5、可采用3.3V-5V直流电源对模块进行供电。当电源接通时,绿色电源指示灯点亮。
2.3智能小车底盘
双电机驱动,万向轮改变方向。这是实验中最常用到的小车底盘,使用差速的方法进行转弯。配合使用L298N电机驱动模块,使用方法很简单,不多做介绍。

 举报
举报