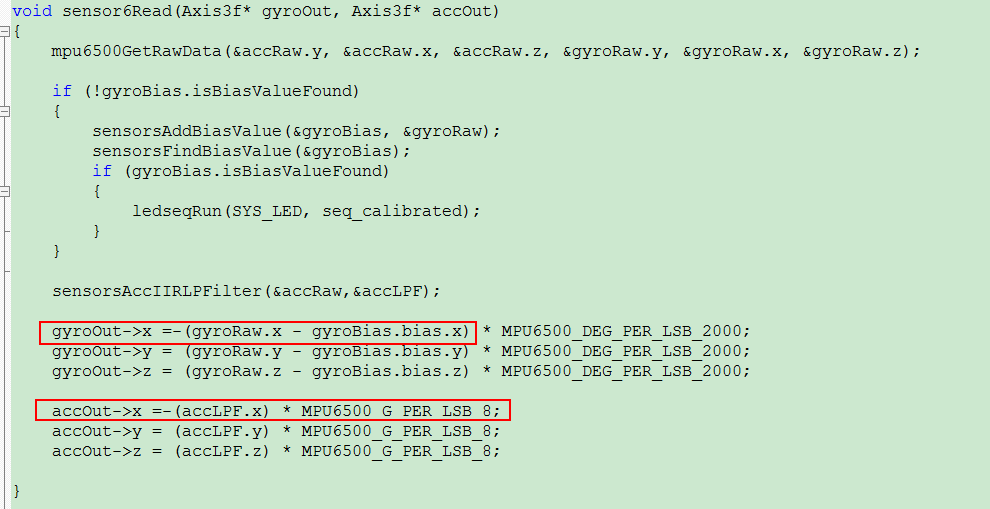
1.看原子的9250读取数据的时候输出的角速度和加速度X轴取反了,这样有什么好处吗?如果是自己做不取反可以吗?2.还有gyroBias.isBiasValueFound没有为它的初始值赋值,意思是初始化后是默认为false吗??
3.对gyro原始数据处理的函数sensorsAddBiasValue(&gyroBias, &gyroRaw);和sensorsFindBiasValue(&gyroBias);是属于什么算法呢???
4.在看方差的求解公式中varOut->x = (sumsq[0] - ((int64_t)sum[0] * sum[0]) / SENSORS_BIAS_SAMPLES;好像并不是方差的公式吧,这个写成数学公式就是(假设3个数据x1,x2,x3)方差S^2=(x1^2+x2^2+x3^2-(x1+x2+x3)*x均值)。但是方差公式应该是S^2=((x1-x均值)^2+(x2x均值-)^2+(x3-x均值)^2)/3。这两个公式还是有很大差别的吧?


 举报
举报



