我使用的是Stm32F411CEU6,最近在搞多个麦克风接收数据,使用的是I2S1和I2S2两个系统,然后开启各自的DMA接收数据然后统一在I2S回调函数中处理。
但是做了测试,比如2对麦克风,我都没放上去,那么四个声道的数据都是0,这是正常的;但是一旦我放上一个麦克风,比如I2S1的左声道,那么I2S2的左声道也会有时候间歇性出现数据,而且I2S1左声道的数据时不时会出现一些0,不过右声道都是0这正常。
另外,如果我单独只开一个I2S系统,那么就是正常的,但是如果同时开就会出现上面的问题。
麦克风是INMP441,网上有资料下面也有原理图
我怀疑是否是DMA出了问题,但是DMA应该是独立的,不过确实是数据不知为何互相干扰了,接下来放出我的配置以及关键代码。下面这个代码是main.c 回调函数和关键的都在里面了。
#include"main.h"
#include"dios_ssp_api.h"
#include"malloc.h"
#define Number 512
int M = 0;
uint32_t DMA[Number];
uint32_t DMADMA[Number];
uint32_t leftValue24[Number/4];
uint32_t rightValue24[Number/4];
int leftValue32[Number/4];
int rightValue32[Number/4];
int micBuf[Number/2];
int micBufBuf[Number/2];
bool isI2S2Over = false;
bool isI2S1Over = false;
int micNumber = 2;
float mic_coord[6] = {-0.05,0,0,0.05,0,0};
float loc_phi = 0;
I2S_HandleTypeDef hi2s1;
I2S_HandleTypeDef hi2s2;
DMA_HandleTypeDef hdma_spi1_rx;
DMA_HandleTypeDef hdma_spi2_rx;
UART_HandleTypeDef huart1;
voidSystemClock_Config(void);
voidPeriphCommonClock_Config(void);
staticvoidMX_GPIO_Init(void);
staticvoidMX_DMA_Init(void);
staticvoidMX_I2S2_Init(void);
staticvoidMX_USART1_UART_Init(void);
staticvoidMX_I2S1_Init(void);
voidHAL_I2S_RxCpltCallback(I2S_HandleTypeDef *hi2s)
{
if(hi2s==&hi2s2)
{
if(isI2S2Over == false)
{
for(int i = 0;i<Number/4;i++)
{
leftValue24[i] = (DMA[4*i]<<8)+(DMA[4*i+1]>>8);
rightValue24[i] = (DMA[4*i+2]<<8)+(DMA[4*i+3]>>8);
if(leftValue24[i] & 0x800000)
{
leftValue32[i]=0xff000000 | leftValue24[i];
}
else
{
leftValue32[i]= leftValue24[i];
}
if(rightValue24[i] & 0x800000)
{
rightValue32[i]=0xff000000 | rightValue24[i];
}
else
{
rightValue32[i]= rightValue24[i];
}
printf("%d %d\r\n",leftValue32[i],rightValue32[i]);
micBuf[i] = rightValue32[i];
micBuf[Number/4+i] = leftValue32[i];
}
isI2S2Over = true;
}
}
if(hi2s == &hi2s1)
{
if(isI2S1Over == false)
{
for(int i = 0;i<Number/4;i++)
{
leftValue24[i] = (DMADMA[4*i]<<8)+(DMADMA[4*i+1]>>8);
rightValue24[i] = (DMADMA[4*i+2]<<8)+(DMADMA[4*i+3]>>8);
if(leftValue24[i] & 0x800000)
{
leftValue32[i]=0xff000000 | leftValue24[i];
}
else
{
leftValue32[i]= leftValue24[i];
}
if(rightValue24[i] & 0x800000)
{
rightValue32[i]=0xff000000 | rightValue24[i];
}
else
{
rightValue32[i]= rightValue24[i];
}
printf("hi2s1:%d %d\r\n",leftValue32[i],rightValue32[i]);
micBufBuf[i] = rightValue32[i];
micBufBuf[Number/4+i] = leftValue32[i];
}
isI2S1Over = true;
}
}
}
#if 1
#include<stdio.h>
int_write(int fd, char *ptr, int len)
{
HAL_UART_Transmit(&huart1, (uint8_t*)ptr, len, 0xFFFF);
return len;
}
#endif
intmain(void)
{
HAL_Init();
void* st1;
void* dios_ssp_init_api(int mic_num,float loc_phi,float *mic_coord);
st1 = dios_ssp_init_api(micNumber,loc_phi,mic_coord);
SystemClock_Config();
PeriphCommonClock_Config();
MX_GPIO_Init();
MX_DMA_Init();
MX_I2S2_Init();
MX_USART1_UART_Init();
MX_I2S1_Init();
HAL_I2S_Receive_DMA(&hi2s2,(uint16_t*)DMA,Number);
HAL_I2S_Receive_DMA(&hi2s1,(uint16_t*)DMADMA,Number);
while (1)
{
if(isI2S1Over == true && isI2S2Over == true)
{
dios_ssp_processDouble_api(st1,micBufBuf);
printf("angle2:%f\r\n",shitAngle);
dios_ssp_process_api(st1,micBuf);
printf("angle1:%f\r\n\r\n",shitAngle);
isI2S2Over = false;
isI2S1Over = false;
}
}
}
voidSystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
__HAL_RCC_PWR_CLK_ENABLE();
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1);
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLM = 12;
RCC_OscInitStruct.PLL.PLLN = 96;
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;
RCC_OscInitStruct.PLL.PLLQ = 4;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_3) != HAL_OK)
{
Error_Handler();
}
}
voidPeriphCommonClock_Config(void)
{
RCC_PeriphCLKInitTypeDef PeriphClkInitStruct = {0};
PeriphClkInitStruct.PeriphClockSelection = RCC_PERIPHCLK_I2S;
PeriphClkInitStruct.PLLI2S.PLLI2SN = 192;
PeriphClkInitStruct.PLLI2S.PLLI2SM = 16;
PeriphClkInitStruct.PLLI2S.PLLI2SR = 3;
if (HAL_RCCEx_PeriphCLKConfig(&PeriphClkInitStruct) != HAL_OK)
{
Error_Handler();
}
}
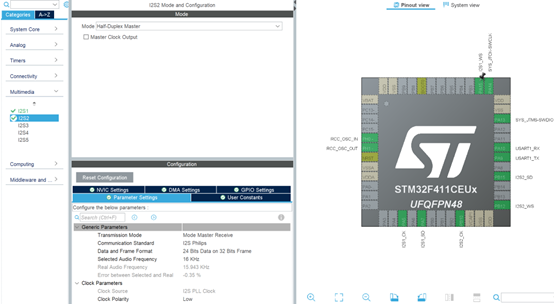
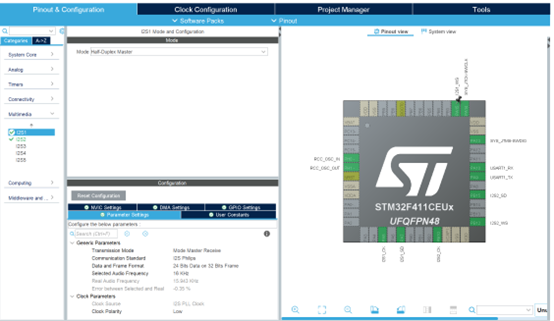
staticvoidMX_I2S1_Init(void)
{
hi2s1.Instance = SPI1;
hi2s1.Init.Mode = I2S_MODE_MASTER_RX;
hi2s1.Init.Standard = I2S_STANDARD_PHILIPS;
hi2s1.Init.DataFormat = I2S_DATAFORMAT_24B;
hi2s1.Init.MCLKOutput = I2S_MCLKOUTPUT_DISABLE;
hi2s1.Init.AudioFreq = I2S_AUDIOFREQ_16K;
hi2s1.Init.CPOL = I2S_CPOL_LOW;
hi2s1.Init.ClockSource = I2S_CLOCK_PLL;
hi2s1.Init.FullDuplexMode = I2S_FULLDUPLEXMODE_DISABLE;
if (HAL_I2S_Init(&hi2s1) != HAL_OK)
{
Error_Handler();
}
}
staticvoidMX_I2S2_Init(void)
{
hi2s2.Instance = SPI2;
hi2s2.Init.Mode = I2S_MODE_MASTER_RX;
hi2s2.Init.Standard = I2S_STANDARD_PHILIPS;
hi2s2.Init.DataFormat = I2S_DATAFORMAT_24B;
hi2s2.Init.MCLKOutput = I2S_MCLKOUTPUT_DISABLE;
hi2s2.Init.AudioFreq = I2S_AUDIOFREQ_16K;
hi2s2.Init.CPOL = I2S_CPOL_LOW;
hi2s2.Init.ClockSource = I2S_CLOCK_PLL;
hi2s2.Init.FullDuplexMode = I2S_FULLDUPLEXMODE_DISABLE;
if (HAL_I2S_Init(&hi2s2) != HAL_OK)
{
Error_Handler();
}
}
staticvoidMX_USART1_UART_Init(void)
{
huart1.Instance = USART1;
huart1.Init.BaudRate = 9600;
huart1.Init.WordLength = UART_WORDLENGTH_8B;
huart1.Init.StopBits = UART_STOPBITS_1;
huart1.Init.Parity = UART_PARITY_NONE;
huart1.Init.Mode = UART_MODE_TX_RX;
huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart1.Init.OverSampling = UART_OVERSAMPLING_16;
if (HAL_UART_Init(&huart1) != HAL_OK)
{
Error_Handler();
}
}
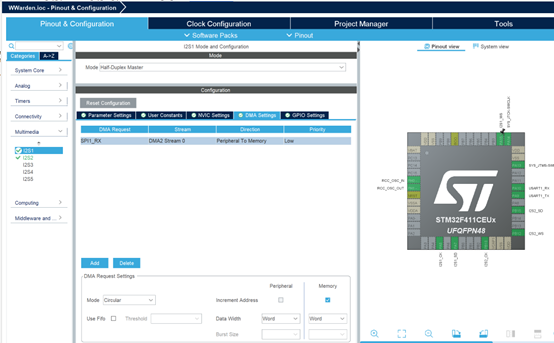
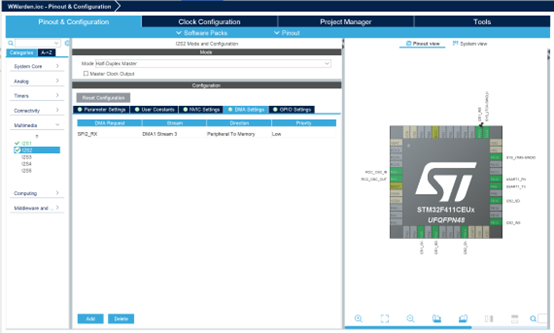
staticvoidMX_DMA_Init(void)
{
__HAL_RCC_DMA1_CLK_ENABLE();
__HAL_RCC_DMA2_CLK_ENABLE();
HAL_NVIC_SetPriority(DMA1_Stream3_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(DMA1_Stream3_IRQn);
HAL_NVIC_SetPriority(DMA2_Stream0_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(DMA2_Stream0_IRQn);
}
staticvoidMX_GPIO_Init(void)
{
__HAL_RCC_GPIOH_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
}
voidError_Handler(void)
{
__disable_irq();
while (1)
{
}
}
#ifdef USE_FULL_ASSERT
void assert_failed(uint8_t *file, uint32_t line)
{
}
#endif
下面的是配置
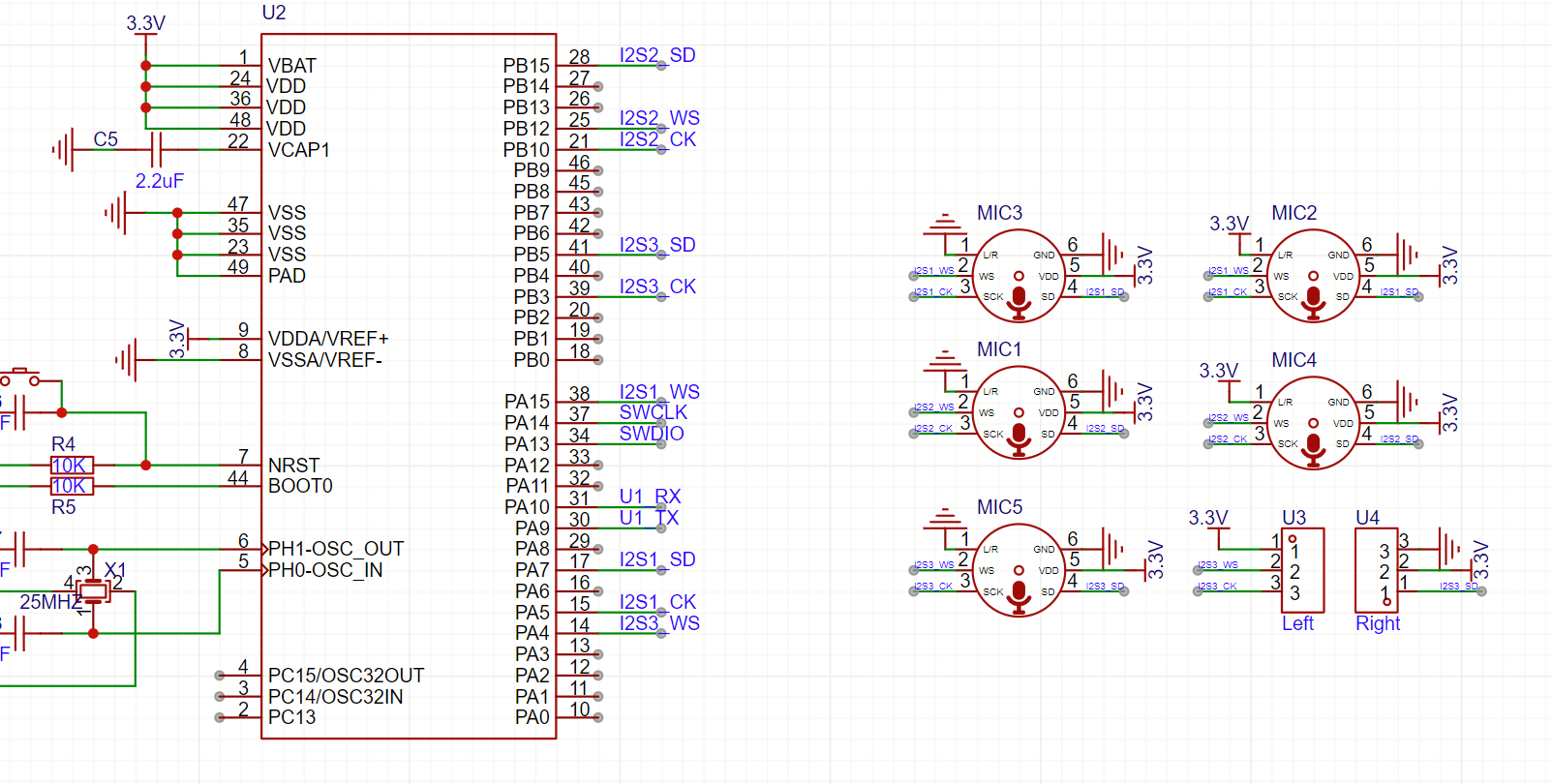
这个是原理图连接
 /9
/9 



 工商网监
湘ICP备2023018690号
工商网监
湘ICP备2023018690号






 淘帖
淘帖 6820
6820





