制作你自己的空气质量和天气监测无人机:DIY技术与环保意识相遇。构建、感知、探索和贡献!
本项目中使用的物品

前言
在环保意识日益增强的时代,如果您可以通过制造一架远程监测周围空气质量和天气状况的无人机来提升您对地球的承诺,那会怎样?在这本综合指南中,我将引导您逐步完成使用尖端硬件组件和强大的软件工具构建无人机的过程。
卷起袖子,准备建造你的无人机。
第 1 步:组装框架
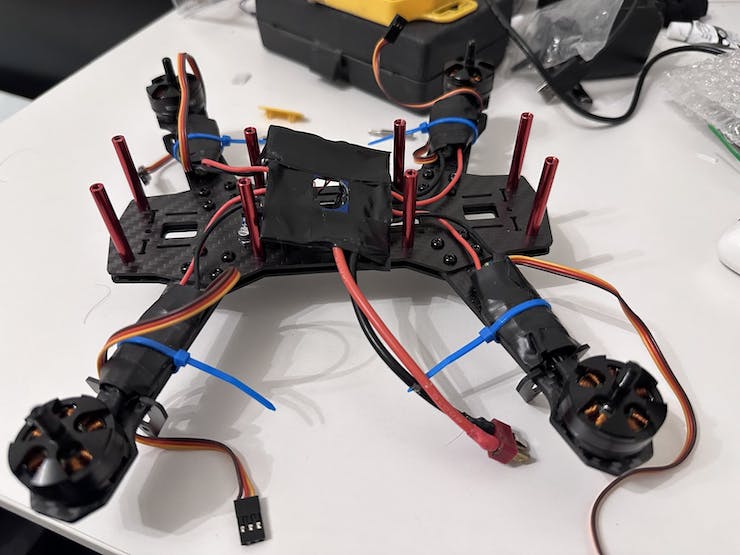
组装无人机框架的基层。将无刷直流电机连接到碳纤维无人机框架的每个臂上。将电调焊接到配电板上,并附上用于连接电池的附加电缆。将电调连接到电机,并确保电机 1 和 3 顺时针旋转,2 和 4 逆时针旋转。
由于将有非常大量的电流流过配电板,因此为了安全起见,最好对其进行适当的绝缘。
基础平台组件
第 2 步:挂载控制器
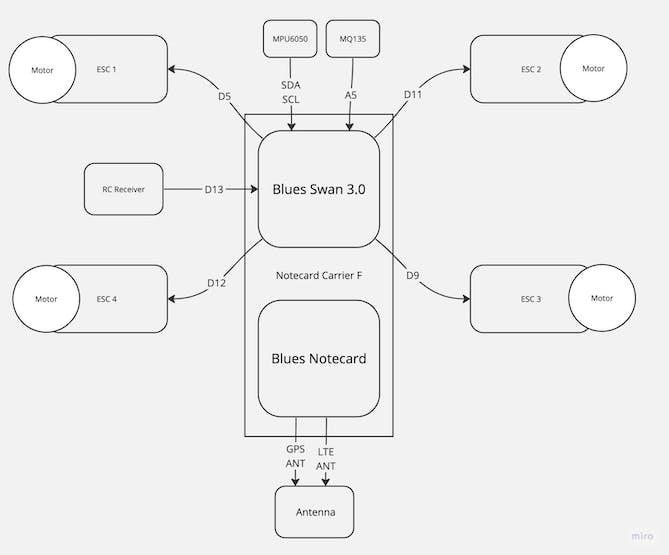
现在,让我们开始将所有组件和传感器放在一起。按照此操作将设备和传感器连接到相应的引脚。
所有连接
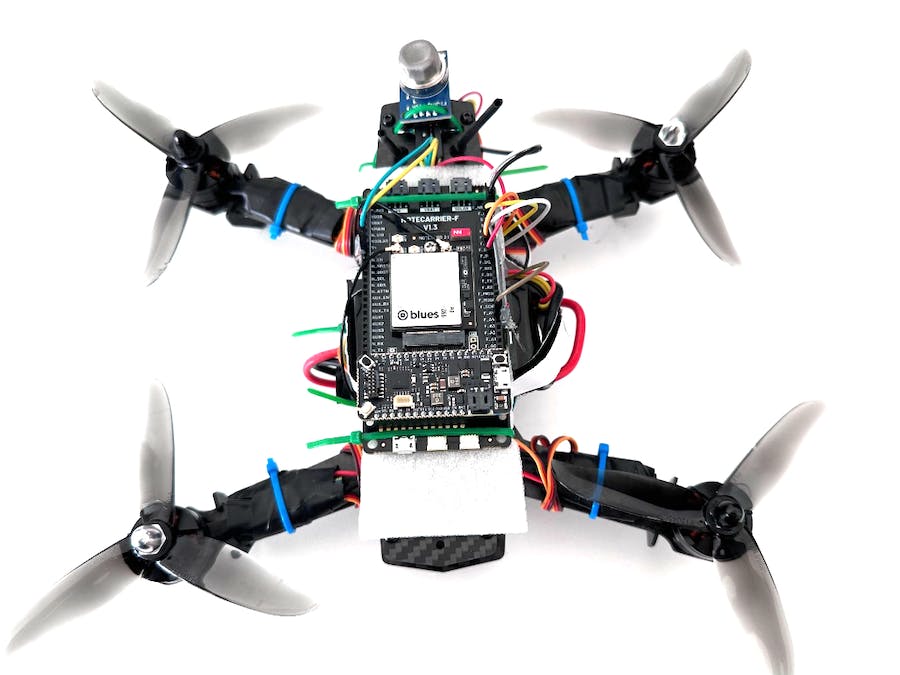
将 Blues Swan 3.0 和 Blues Notecard 连接到 Notecarrier F 并放置在无人机顶部,用螺钉或扎带将其固定到无人机框架上。将 LTE 和 GPS 天线连接到记事卡上。
第 3 步:配置发射器/接收器 RC
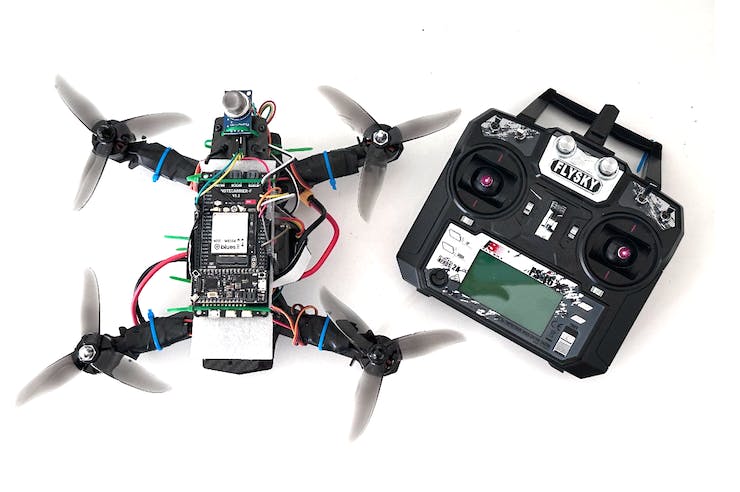
将 FlySky i6X 或任何其他 2.4 Ghz 无线电控制器绑定到您的接收器,并将其设置为以 PPM 模式发送数据。将接收器连接到 D13。
第 4 步:连接 IMU
将MPU6050安装在尽可能靠近中心的完美水平位置。MPU6050的放置对于无人机至关重要,因为它是无人机用来在空中保持平衡的主要传感器。将其连接到 Swan 的 I2C 接口。
第 5 步:连接空气质量传感器
将 MQ135 空气质量传感器的模拟引脚连接到 Swan 的 A5 引脚。该传感器应放置在无人机的顶部,以获得更好的读数并避免电机推力的干扰。
第 6 步:连接电机
是时候连接所有电机了。先不要连接螺旋桨!
考虑到配置是
从右下角的电机 1 开始,顺时针移动电机 2、电机 3 和电机 4,并将它们的信号引脚分别连接到 D5、D11、D9 和 D12。
第 7 步:电源连接
我们连接了所有组件的所有信号引脚,但没有连接电源引脚。所有设备和传感器均在 5V 电压下工作。获得 5V 稳压的最佳位置是从 ESC 输入连接器之一。您可以将 RC 接收器用作配电板。将其中一个 ESC 的输入连接器上的 VCC 和 GND 引脚连接到 RC 接收器的 VCC 和 GND 引脚。您可以使用 RC 的所有剩余并联 VCC 和 GND 引脚为器件供电。
第 8 步:将其包裹紧
使用扎带正确固定所有电线和设备,以免螺旋桨附近出现任何物体。当无人机运行时,会有很多振动和强大的运动。确保安装的所有东西都足够紧密。
第 9 步:编码和上传
编码和上传很有趣!
现在我们已经准备好了所有硬件并将所有东西都安装在无人机框架上,是时候将代码上传到 Swan 了。在Arduino IDE中打开提供的代码。
将Blues板配置添加到Arduino IDE。
转到“设置”>“首选项”
将此链接粘贴到
其他 Boards Manager URL:
https://github.com/stm32duino/BoardManagerFiles/raw/main/package_stmicroelectronics_index.json
现在,转到工具>板>板管理器
根据产品名称寻找: “STM32”
安装基于STM32 MCU的板
现在选择 Board:
工具>板 > STM32 板组 > Blues Wireless 板
选择电路板部件号:
工具>板部件号 > Swan R5
选择上传方法:
工具 > 上传方法 > STM32CubeProgrammer (DFU)
安装STM32Cube,因为Arduino使用一些驱动程序来上传该软件附带的代码
https://www.st.com/en/development-tools/stm32cubemx.html
第 10 步:连接
将代码中的“产品 ID”更改为记事卡的 ID。对于初始测试,您可以使用WiFi,添加您的SSID和密码,并将WIFI_ENABLE更改为1。默认情况下,记事卡将通过 LTE 连接到 notehub。连接USB时按住启动按钮。
将此代码上传到 Swan。
第 11 步:开机
连接电池。将发射器的两根摇杆拉到最低值(左下角)。这将启用无人机并启动您的控制回路。
稍微踩一下油门,通过向不同方向移动无人机来检查无人机的响应。无人机应在无人机移动的方向上产生相等且相反的电机响应。如果没有,您可能需要再次检查电机连接。
第 12 步:使用螺旋桨进行测试
在此步骤中要格外小心,因为是时候安装螺旋桨了!
将 CW 和 CCW 螺旋桨连接到电机。
启动无人机并给很少的油门,直到电机启动。像在上一步中一样移动无人机,并检查您是否觉得无人机试图通过增加正确方向的推力来补偿运动。
您可能需要调整 PID 参数,因为它们对不同的配置、总重量和其他因素很敏感。您需要使用试错法来获得完美的参数组合。从调整 P 开始,然后是 I,最后是 D 以获得平稳飞行。确保在测试无人机时格外小心,因为即使是很小的额外油门也会导致严重伤害。
第 13 步:准备飞行!
一切看起来都不错,让我们带着无人机兜风吧。到一个远离人、建筑物、窗户、孩子和任何可能破裂或哭泣的东西的开放空间!
一切准备就绪!
第 14 步:云集成
如果您正确地遵循了所有内容,您应该会在 notehub.io 上获取事件
关于如何将传入消息从 notehub 转发到其他云平台,有很好的文档。
按照 Datacake 集成说明可视化您的无人机数据。
https://docs.datacake.de/integrations/blues-wireless-notecard
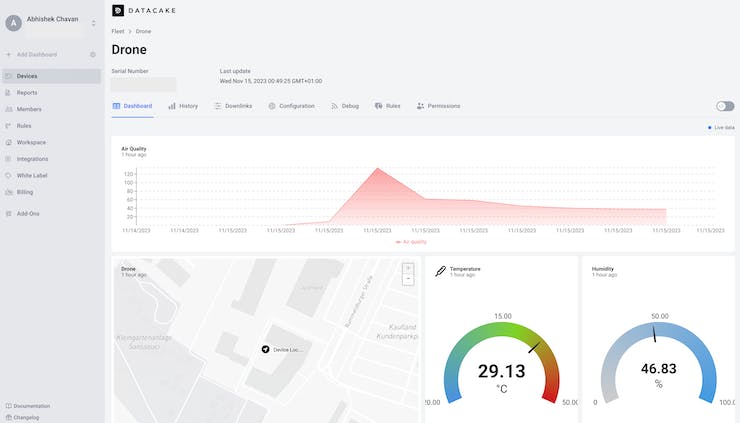
监测站
祝贺!您已经成功制造了一架能够监测空气质量和天气状况的无人机。当您的无人机起飞时,为您的 notehub.io 帐户和 Datacake 仪表板提供有价值的数据,您将在环境监测中发挥积极作用。
愿您的无人机翱翔高空,为一个更清洁、更健康的世界做出贡献!祝您飞行愉快!
*附件:源代码程序
 /9
/9 



 工商网监
湘ICP备2023018690号
工商网监
湘ICP备2023018690号












 淘帖
淘帖 3355
3355





