什么是高精度地图
高精度地图:(1)是和普通导航电子地图相对而言的服务于自动驾驶系统的专题地图(2)是包含道路形状、道路标记、交通标志和障碍物等地图元素(3)是涵盖道路交通状况实时动态信息,(4)是地图精度可以到厘米级别的高精度地图。
高精度地图特性
从数据精度和要素丰富度角度定义,简称HD Map(High Definition Map,通俗来讲就是定位精度更高、数据维度更多的电子地图。
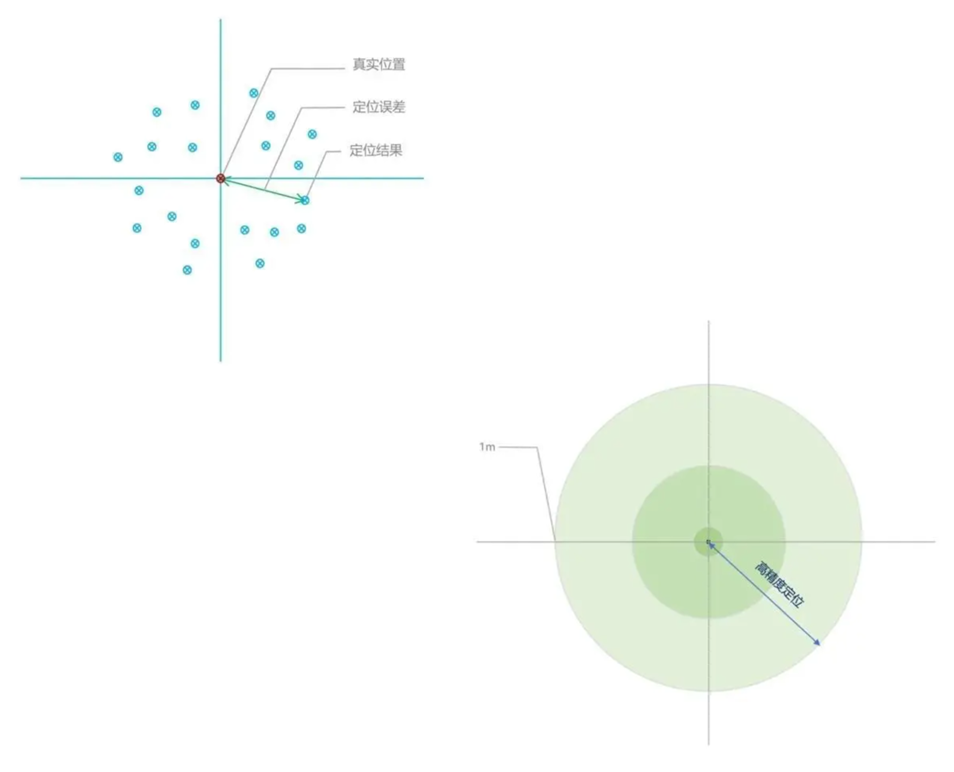
(1)定位精度更高-服务于自动驾驶的高精度地图的精度需要控制在 20-50 厘米左右,才能保证不会因地图精度误差发生碰撞。
高精度地图绝对精度(地图上某个目标和外部世界真实目标点的精度差)接近1米;
高精度地图相对位置(介于同一地图上的两个及以上目标精度差)在厘米级别,能够达到10-20cm。
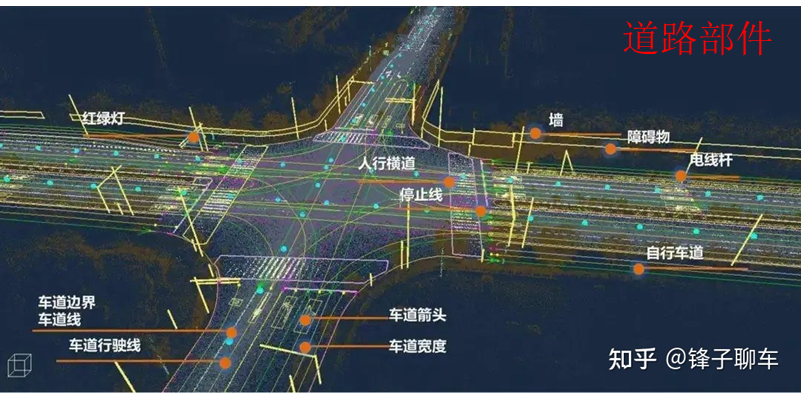
(2)数据维度多包含车道模型、道路部件、道路属性以及多传感器定位的静态信息以及交通路况及事故的动态信息。
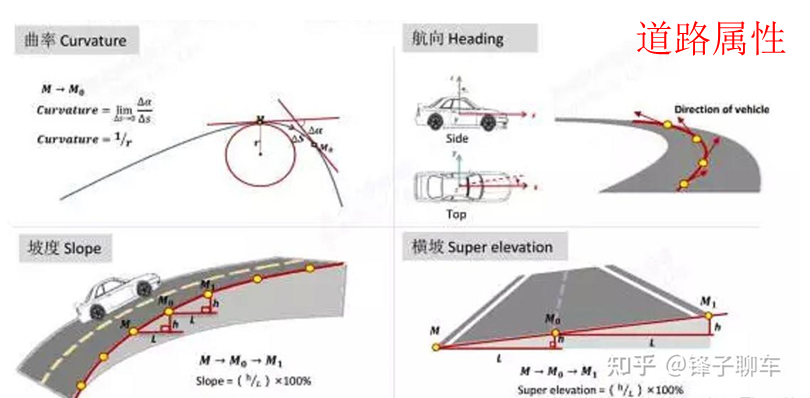
静态信息: (1)道路部件:各种标志信息红绿灯、标志牌、隧道、收费站;(2)道路属性:高速,国道,匝道、坡度、曲率、航向、高程、侧倾;(3)车道模型:车道数量,车道类型、车道宽度、车道几何类型(4)传单器定位信息:基于视觉传感器,毫米波雷达,激光雷达等,提供亚米级到厘米级定位能力。
动态信息: (1)交通参与者的信息(如道路拥堵情况、施工情况、是否有交通事故、交通管制情况、天气情况等)(2)交通参与物的信息(如红绿灯、人行横道等)
从自动驾驶功能的分级标准角度定义,简称 HAD Map(HighlyAutomated Driving Map,用于支撑自动驾驶车辆感知周围环境,规划最优路径,控制车辆行使,以实现自主做出驾驶决策。参考:

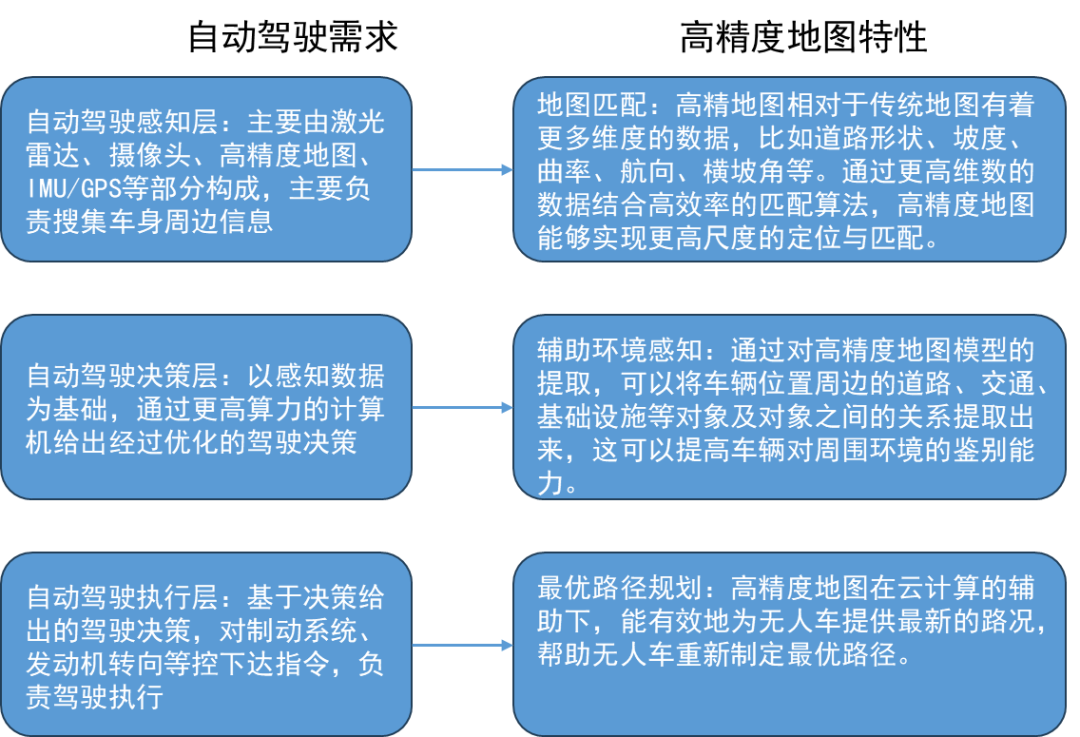
(1)感知周围环境(感知层) :由电子地图和传感器组成,电子地图提供传统的导航、导航电子地图数据和高精度电子地图数据,传感器通过云服务平台,将动态实时信息传达给车辆,让车辆提前预知前方出现的可能影响驾驶策略的情况
(2)规划最优路径(决策层) :通过传感器的数据和敏感信息,对车辆进行定位,对路径进行规划,对环境进行理解
(3)控制车辆行使(执行层) :代替驾驶员进行控制层的电子驱动,对车辆进行控制


高精度地图与自动驾驶汽车
关于自动驾驶汽车
自动驾驶汽车:(Autonomousvehicles;Self-pilotingautomobile)又称无人驾驶汽车、电脑驾驶汽车、或轮式移动机器人,是一种通过电脑系统实现无人驾驶的智能汽车。
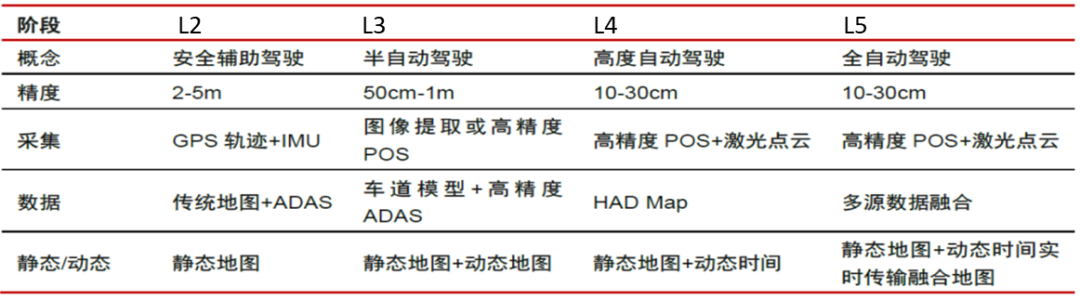
根据《汽车驾驶自动化分级》(GB/T40429-2021)规定,目前自动驾驶技术中分为L0-L5的六个等级。
L0:依靠人识别行使路径,纯人工驾驶。
L1-L2:米级精度的ADAS地图就足以满足功能需要了,而且车辆是否配备地图也只是一个功能选项不做强制要求。
L3:需要ADAS地图和高精地图,大部分需要米级精度,部分区域需要达到厘米级,对于一些必须用到的情况,地图就做强制要求。
L4以上:车辆其实行驶再一个虚拟城市中,这个城市是基于地图构建的,所以地图精度一定要达到厘米级。
高精度地图与自动驾驶的契合
自动驾驶是一个庞大而复杂的技术体系,类比与人类驾驶行为,技术主要分为三大类:感知层、决策层、控制层.
参考:

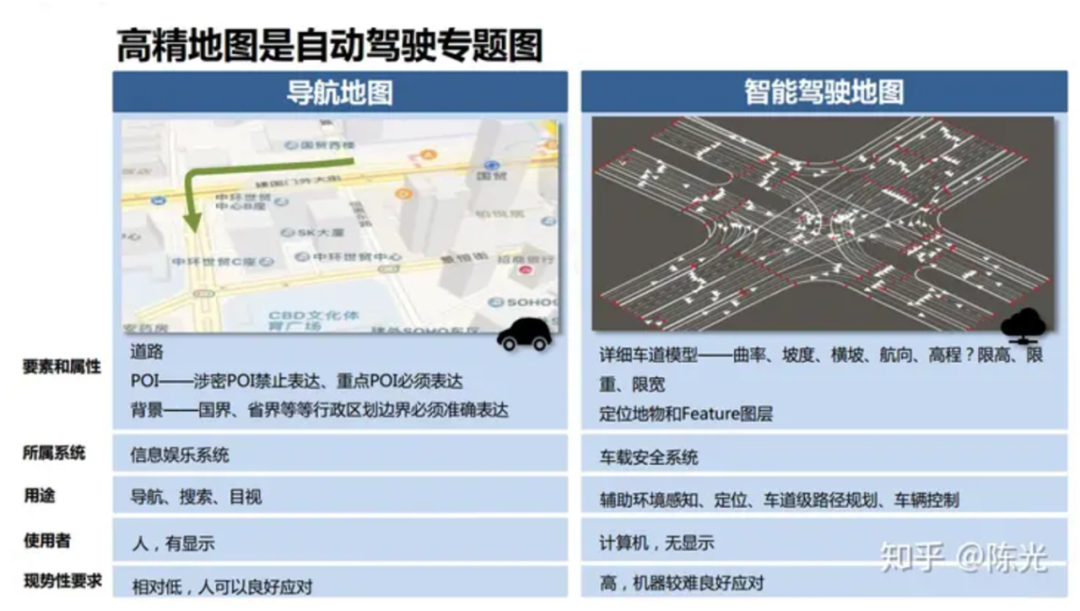
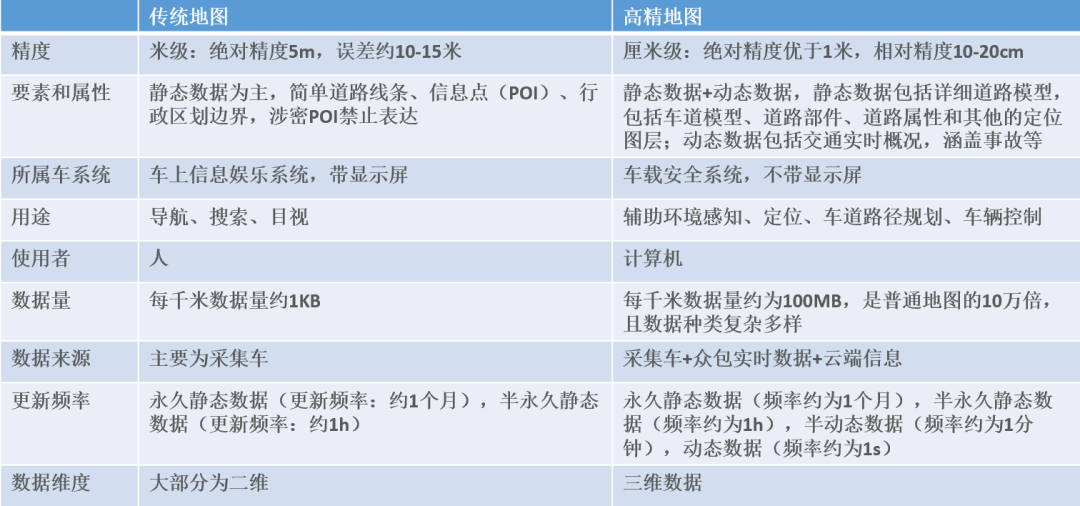
高精度地图与普通地图的区别
高精度地图与一般电子导航地图相比,主要不同之处体现在精度、要素和属性、用途、数据更新频率、使用对象和数据的实时性等方面。
高精度地图数据及制作流程
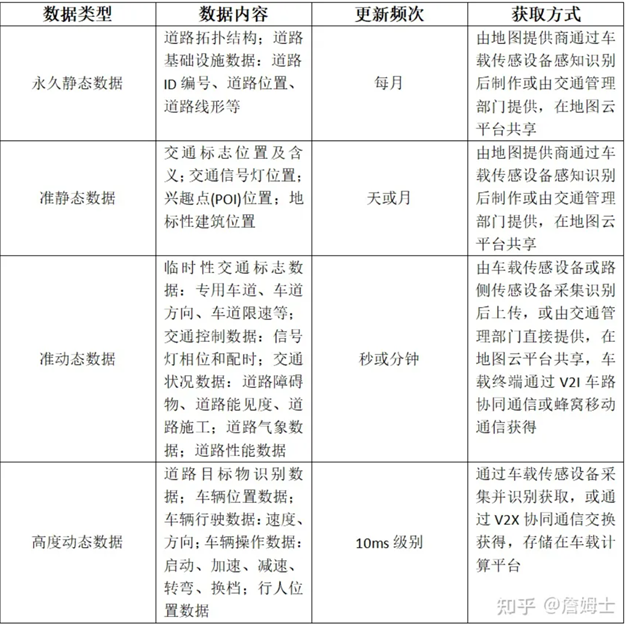
高精度地图数据结构
高精度地图数据结构包括静态地图层与动态地图层,静态地图数据主要目的在于精准刻画静态驾驶环境,提供丰富的道路语义信息约束与控制车辆行为。动态地图层与实时道路环境密切相关,包括车辆传感器获得的附近行人、车辆及信号灯等信息,以及其他场景获得信息。
(1)静态地图数据(永久静态数据和准静态数据):相比于一般的导航电子地图,主要特征是对道路进行车道级的精细刻画,增加了对道路附属设施及车位等泊车辅助设施的描述。
(2)动态地图数据(准动态数据和高度动态数据):一方面,车辆传感器(如摄像头、雷达等)需要主动感知车辆附近的行人、车辆及信号灯等信息;另一方面,由于复杂行驶环境可能导致视野盲区的出现,通过引入动态地图数据,扩展传感器的视野,保证自动驾驶的安全性、平稳性、舒适性。
高精度地图数据来源
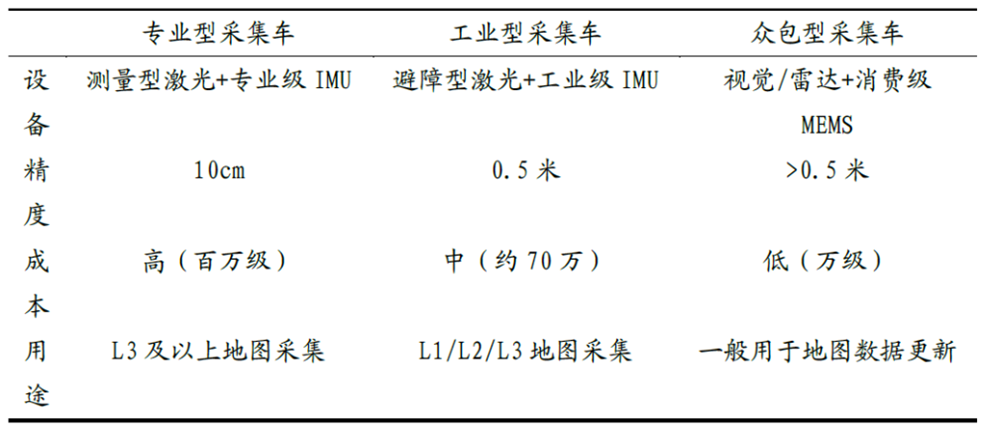
高精度地图数据来源分为专业采集车数据采集以及众包采集。
专业采集车数据采集: 包括采集采集 ADAS(高级驾驶辅助系统)级别高精度地图数据采集车 及 HAD 精度要求的高精度地图数据采集车。
采集技术:传感器+摄像头
通过激光雷达、毫米波雷达、摄像头、陀螺仪、雨水传感器等,都能够回传包括道路状况、天气状况等高精度地图必须的信息,通过类似后视镜、行车记录仪等带摄像头的后装硬件,都能向高德回传带有道路数据的照片,作为高精度地图数据的补充
众包采集: 道路行使非专业采集车辆
即将地图更新任务交给道路上行驶的大量非专业采集车辆,利用车载传感器实时检测环境变化,并与高精度地图进行比对,当道路发生变化时,将数据上传至云平台,在下发更新给其他车辆,从而实现地图数据的快速更新。
高精度地图制图流程
高精度地图数据生产包括数据采集、数据处理、元素识别、人工验证、产品编译五大环节。来源:

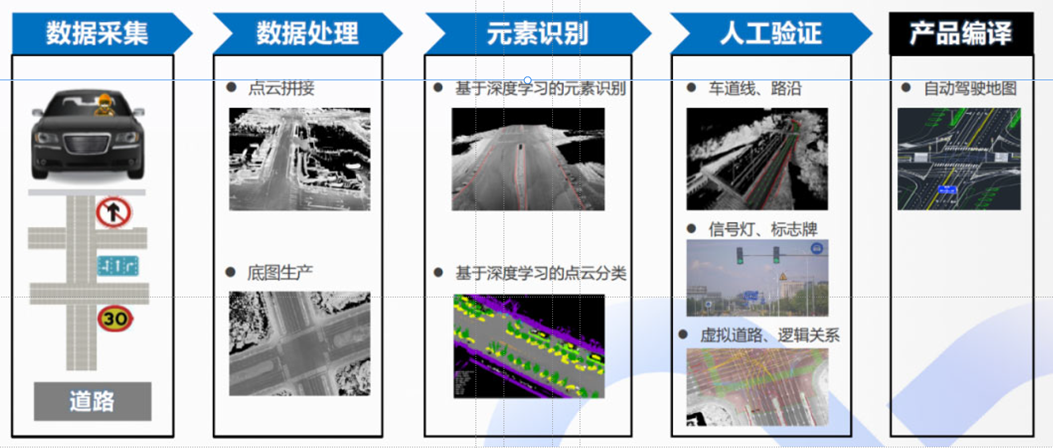
数据采集阶段: 通过高精地图采集车进行数据的采集,高精地图采集车一般涵盖采集点云数据的激光雷达装置,进行高精度定位的rtk装置,获取车辆角度和加速度的惯导系统等构成高精地图采集车。
数据处理阶段: 数据分为点云(激光雷达获取)和图像(摄像头获取)两类,因为高精度要求,制图以点云为主。
(1)点云拼接:采集过程中信号可能不稳定 (RTK在遮挡情况下会出现不稳定现象),通寸SLAM等对pose做优化,优化之后对点云信息做拼接得到完整的点云信息。点云信息被压扁得到定位地图图像、反射地图图像。反射地图可以做一些标注
(2)点云图像处理后得到一个高精度图像,基于图像可以做精确的车道线识别,获得车道线的形状特征。但仍需要道路虚实线、黄白线、路口标识等信息,这时候需要元素识别。
元素识别: 基本上都是使用深度学习来获取地图的要素识别;基于深度学习的地图要素识别有两个层面
(1)是否能基于点云分割,从点云里提取特征
(2)尝试从点云中提取车道线、灯杆、红绿灯等
人工验证与产品编译: 这一环节由人工完成,自动化处理的数据还不能百分百准确,需要人工进行最后一步的确认和完善。按照现在的情况,一名员工修正的数据量在30-50公里左右,对于修正后的数据,需要上传到云端,最终形成高精度地图也通过云平台进行分发。
高精度地图是一项制作成本高,制作程序复杂,其与各类高精度定位技术之间的关系与差别还值得后续进一步讨论!!!
 /9
/9 



 工商网监
湘ICP备2023018690号
工商网监
湘ICP备2023018690号




















 淘帖
淘帖 872
872






