很高兴获得沁恒 CH32V208 开发板试用资格。
开箱

包装很结实,十分用心.

防静电。

WCH—LINK
CH32V208 开发板
静电防护。
测试舵机为的是实现多路的机器人机械臂控制做准备,现在程序设计的是六路控制.
程序如下:
#include "debug.h"
void GPIO_Toggle_INIT(void)
{
GPIO_InitTypeDef GPIO_InitStructure = {0};
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1 | GPIO_Pin_2 | GPIO_Pin_3 | GPIO_Pin_4 | GPIO_Pin_5 ;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
}
int main(void)
{
int var;
int max=30;
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
Delay_Init();
USART_Printf_Init(115200);
printf("SystemClk:%d\\\\\\\\\\\\\\\\r\\\\\\\\\\\\\\\\n", SystemCoreClock);
printf("GPIO Toggle TEST\\\\\\\\\\\\\\\\r\\\\\\\\\\\\\\\\n");
GPIO_Toggle_INIT();
while(1)
{
for (var = 1; var < max; ++var) {
GPIO_WriteBit(GPIOA, GPIO_Pin_0, 1);
Delay_Ms(1);
GPIO_WriteBit(GPIOA, GPIO_Pin_0, 0);
Delay_Ms(19);
}
for (var = 1; var < max; ++var) {
GPIO_WriteBit(GPIOA, GPIO_Pin_1, 1);
Delay_Ms(1);
GPIO_WriteBit(GPIOA, GPIO_Pin_1, 0);
Delay_Ms(18);
}
for (var = 1; var < max; ++var) {
GPIO_WriteBit(GPIOA, GPIO_Pin_2, 1);
Delay_Ms(1);
GPIO_WriteBit(GPIOA, GPIO_Pin_2, 0);
Delay_Ms(19);
}
for (var = 1; var < max; ++var) {
GPIO_WriteBit(GPIOA, GPIO_Pin_3, 1);
Delay_Ms(1);
GPIO_WriteBit(GPIOA, GPIO_Pin_3, 0);
Delay_Ms(18);
}
}
}
编译:
编译完成:
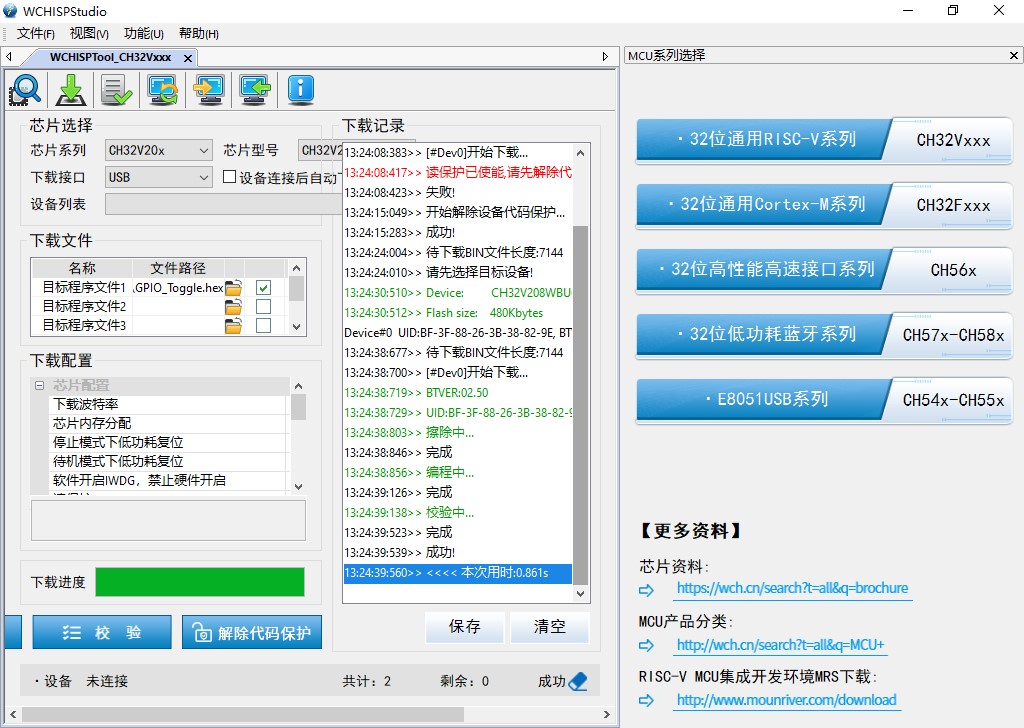
烧录:
支持国产!此沁恒 CH32V208 开发板很快就能上手,开箱后两个小时就可以大致的做出实验用品,可以测试是否运行正常,为接下来的工程做准备。下一次有时间会继续这个项目。(还需要牺牲休息时间做)
https://m.elecfans.com/v/365717
谢谢!





 工商网监
湘ICP备2023018690号
工商网监
湘ICP备2023018690号








 淘帖
淘帖

