Canopen协议移植和设备通讯测试
Canopen设备通讯测试是基于RA4M2产品CAN总线外设功能的一个小项目应用,其主要功能是通过RA4M2评估板采集开关量状态,通过canopen协议将开关量状态实时发送到canopen主机端。
Can网络构成
根据设计目的,通过RA4M2评估板外扩CAN总线接口,和外部两个CAN总线设备构成一个CAN的局域网,其中一个设备用于canopen 主机,一个设备作为CAN总线的监视设备。
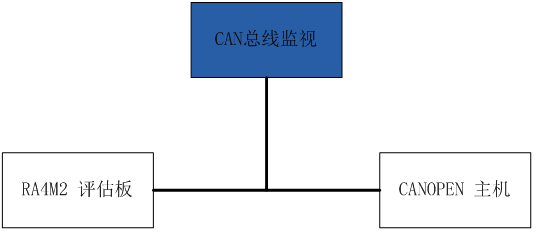
其中:
RA4M2为canopen设备,基于canopenNode协议栈
CANOPEN主机采用自制的SLCAN设备,支持python
CAN总线监视设备为自制的CAN总线设备。
软件实现
RA4M2评估板canopen协议栈
1)canopennode协议栈下载
CanopenNode为github上的一个开源项目,在gitee上面也可以找到,大家搜索即可,这里不展开介绍。
2)canopeneds管理关键
基于开源软件自己编译的,和canopenNode配套的软件,可以直接生成对象字典的C文件和H文件,集成进软件中及可以了。
3)canopenNode的移植
协议栈移植时基于前一个试用《CAN总线收发测试》,链接为:https://bbs.elecfans.com/jishu_2319076_1_1.html
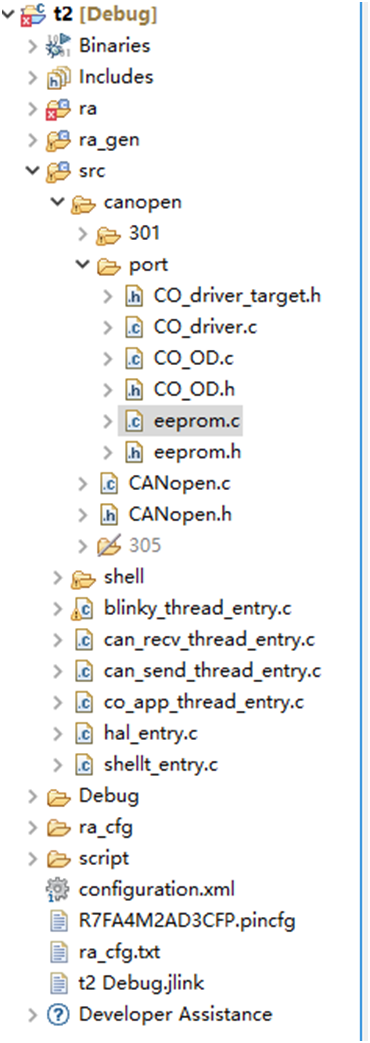
将前面下载的canopenNode源码打开,如下图所示,我们在工程文件下,建立canopen虚拟文件夹,并将301目录,example目录下复制到工程中,再将CANopen.c和CANopen.h复制到工程中,将example目录名修改为port。
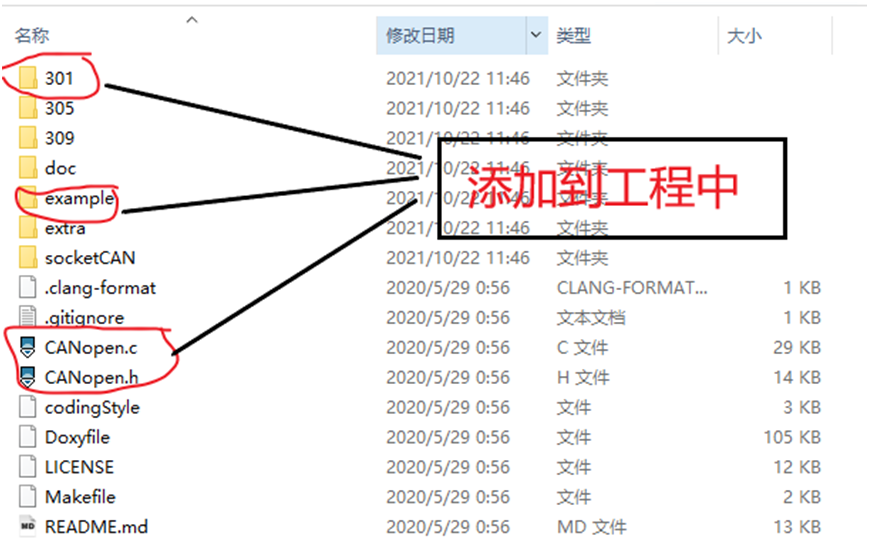
文件添加完成后的工程如下图所示:
移植过程主要时port目录下面CO_driver.c中相关接口函数的移植:
- 添加必要的头文件
- CO_CANModule_Init函数移植
void *CANptr,
CO_CANrx_t rxArray[],
uint16_t rxSize,
CO_CANtx_t txArray[],
uint16_t txSize,
uint16_t CANbitRate)
{
FSP_PARAMETER_NOT_USED (CANbitRate);
… … 此处省略若干代码
fsp_err_t err = *FSP_SUCCESS* ;
err = R_CAN_Open (&g_can0_ctrl, &g_can0_cfg);
assert(*FSP_SUCCESS* == err);
return CO_ERROR_NO ;
}
- CO_CANmodule_disable 函数移植
void CO_CANmodule_disable (CO_CANmodule_t *CANmodule)
{
FSP_PARAMETER_NOT_USED (CANmodule);
fsp_err_t err = *FSP_SUCCESS* ;
err = R_CAN_Close (&g_can0_ctrl);
assert(*FSP_SUCCESS* == err);
}
* CO_CANtx_t CO_CANtxBufferInit (CO_CANmodule_t
*CANmodule,
uint16_t index,
uint16_t ident,
bool_t rtr,
uint8_t noOfBytes,
bool_t syncFlag)
{
CO_CANtx_t *buffer = NULL
if ((CANmodule != NULL) && (index < CANmodule->txSize)){
/* get specific buffer */
buffer = &CANmodule->txArray[index];
/* CAN identifier, DLC and rtr, bit aligned with CAN module transmit buffer.
buffer->ident = ((uint32_t)(ident & 0x07FFU) | (uint32_t)(rtr ? 0x8000U : 0U))
buffer->DLC = (uint32_t)noOfBytes & 0xFU
buffer->bufferFull = false
buffer->syncFlag = syncFlag
return buffer
}
}
l CO_CANinterrupt 函数移植
将原 CO_CANinterrupt 函数调整为CO_CANinterrupt_TX 和CO_CANinterrupt_Rx 两个函数
void CO_CANinterrupt_Rx (CO_CANmodule_t *CANmodule , _CANMsg_t *rcvMsg)
{
uint16_t index;
uint32_t rcvMsgIdent;
CO_CANrx_t *buffer = NULL;
bool_t msgMatched = false;
rcvMsgIdent = rcvMsg->ident;
{
buffer = &CANmodule->rxArray[0];
for (index = CANmodule->rxSize; index > 0U; index--){
if (((rcvMsgIdent ^ buffer->ident) & buffer->mask) == 0U){
msgMatched = true;
break ;
}
buffer++;
}
}
if (msgMatched && (buffer != NULL) && (buffer->CANrx_callback != NULL)){
buffer->CANrx_callback(buffer->object, ( void *) rcvMsg);
}
}
void CO_CANinterrupt_Tx (CO_CANmodule_t *CANmodule) {
CANmodule->firstCANtxMessage = false;
CANmodule->bufferInhibitFlag = false;
if (CANmodule->CANtxCount > 0U){
uint16_t i;
CO_CANtx_t *buffer = &CANmodule->txArray[0];
for (i = CANmodule->txSize; i > 0U; i--){
if (buffer->bufferFull){
buffer->bufferFull = false;
CANmodule->CANtxCount--;
CANmodule->bufferInhibitFlag = buffer->syncFlag;
_can_send(buffer);
break ;
}
buffer++;
}
if (i == 0U){
CANmodule->CANtxCount = 0U;
}
}
}
void can_recv_thread_entry (void *pvParameters)
{
FSP_PARAMETER_NOT_USED (pvParameters);
_CANMsg_t RxMsg;
while (1)
{
if (xQueueReceive(g_canrecv_queue, &RxMsg,100) == pdTRUE) {
if (CO != NULL)
CO_CANinterrupt_Rx(CO->CANmodule[0] , &RxMsg); }
}
}
CAN发送线程的移植:
void can_send_thread_entry (void *pvParameters){
FSP_PARAMETER_NOT_USED (pvParameters);
can_frame_t TxMsg;
_CANMsg_t msg;
while (1)
{
if (xQueueReceive(g_cansend_queue, &msg,100) == pdTRUE) {
TxMsg.id = msg.ident;
TxMsg.data_length_code = msg.DLC;
TxMsg.type = *CAN_FRAME_TYPE_DATA* ;
memcpy (TxMsg.data, msg.data, 8); can_send(TxMsg);
}
}
}
毫秒定时器
Canopen协议的驱动还需要一个1ms定时器,利用系统中的timer0定时器,创建一个1ms定时器,在回调函数中添加canopen的定时处理事务。
void timer0_callback** (timer_callback_args_t *p_args){
if (p_args->event == *TIMER_EVENT_CYCLE_END* )
{
INCREMENT_1MS(CO_timer1ms);
if (CO->CANmodule[0]->CANnormal) {
bool_t syncWas;
syncWas = CO_process_SYNC(CO,TMR_TASK_INTERVAL, NULL);
CO_process_RPDO(CO, syncWas);
CO_process_TPDO(CO, syncWas,TMR_TASK_INTERVAL, NULL);
if (0) {
CO_errorReport(CO->em, CO_EM_ISR_TIMER_OVERFLOW,CO_EMC_SOFTWARE_INTERNAL, 0U);
}
}
}
}
3、实测运行
为了完成测试,需要构建一个canopen主机,这里使用python+slcan+canopen搭建一个CANOPEN主机。
基本代码为:
import time
import canopen
// #创建一个网络用来表示CAN总线
network = canopen.Network()
// #添加slave节点,其id是6,对象字典为CANopenSocket.eds
node = canopen.RemoteNode(10, 'c1.eds')
network.add_node(node)
forobjinnode.object_dictionary.values():
print('0x%X: %s' % (obj.index, obj.name))
ifisinstance(obj, canopen.objectdictionary.Record):
forsubobjinobj.values():
print(' %d: %s' % (subobj.subindex, subobj.name))
/# 连接到CAN总线
network.connect(interface='slcan', channel='COM4', bitrate=125000)
time.sleep(1)
stat = node.nmt.state
print(stat)
time.sleep(0.5)
/# Change state
to operational (NMT start)
node.nmt.state = 'PRE-OPERATIONAL'
time.sleep(0.5)
/# Read a
variable using SDO
device_name = node.sdo['Manufacturer
device name'].raw
time.sleep(0.5)
vendor_id = node.sdo[0x1018][1].raw
print(device_name)
print(vendor_id)
time.sleep(0.5)
/# Write a
variable using SDO
node.sdo['Producer
heartbeat time'].raw = 3000
time.sleep(0.5)
/# Read PDO
configuration from node
node.tpdo.read()
node.rpdo.read()
/# Using a
callback to asynchronously receive values
/# Do not do any
blocking operations here!
defprint_speed(message):
print('%s received' % message.name)
forvarinmessage:
print('%s = %d' % (var.name, var.raw))
node.tpdo[1].add_callback(print_speed)
/
to operational (NMT start)
node.nmt.state = 'OPERATIONAL'
time.sleep(0.5)
/
every 100 ms
network.sync.start(0.1)
time.sleep(0.5)
whileTrue:
pass
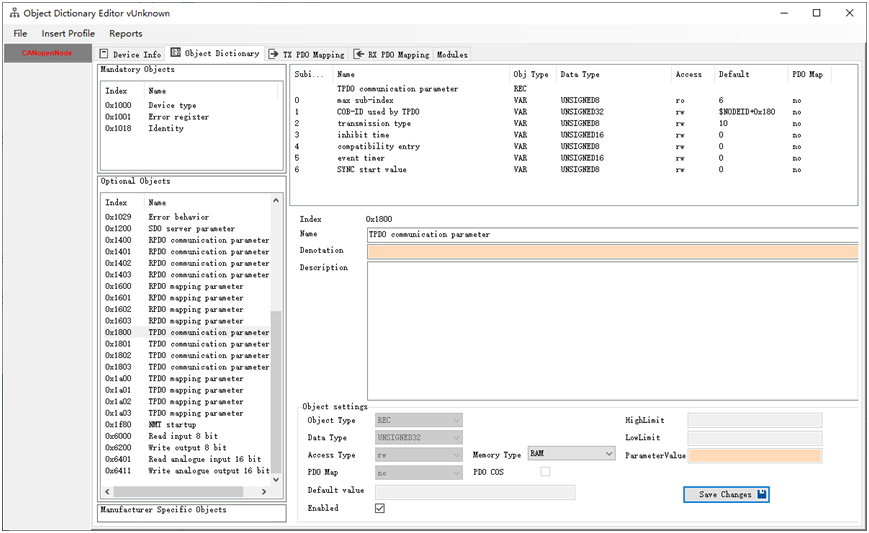
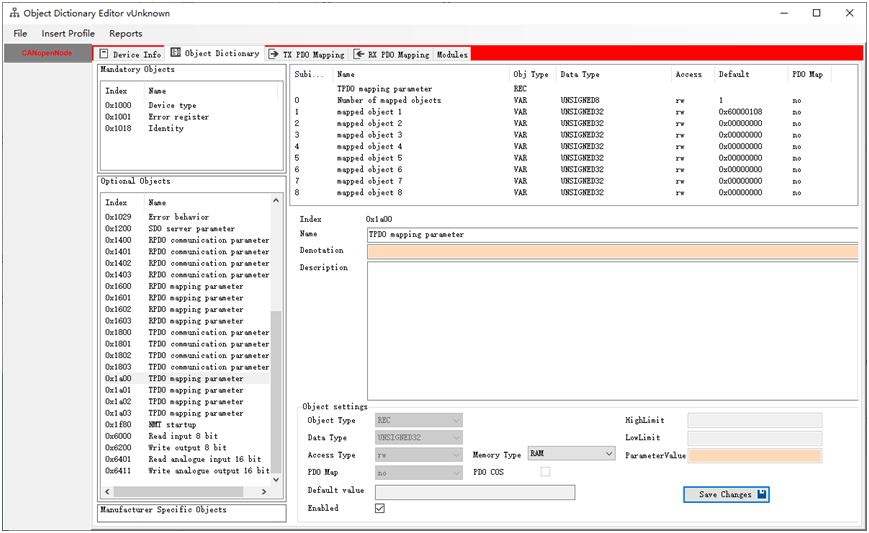
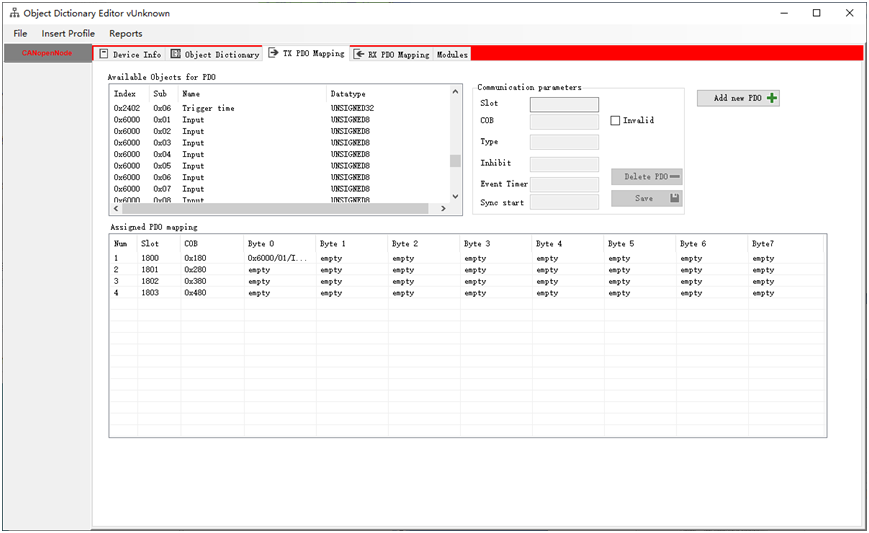
CANOpen设备的配置情况,0x6000开始保存8字节的开关量输入信息,TPDO[1]配置为同步循环发送,同步10次发送1次。TPDO[1]中就包含一个数据字节,为0x6000对应的第一字节的开关量。具体配置信息见下图。
设备地址设置为10.
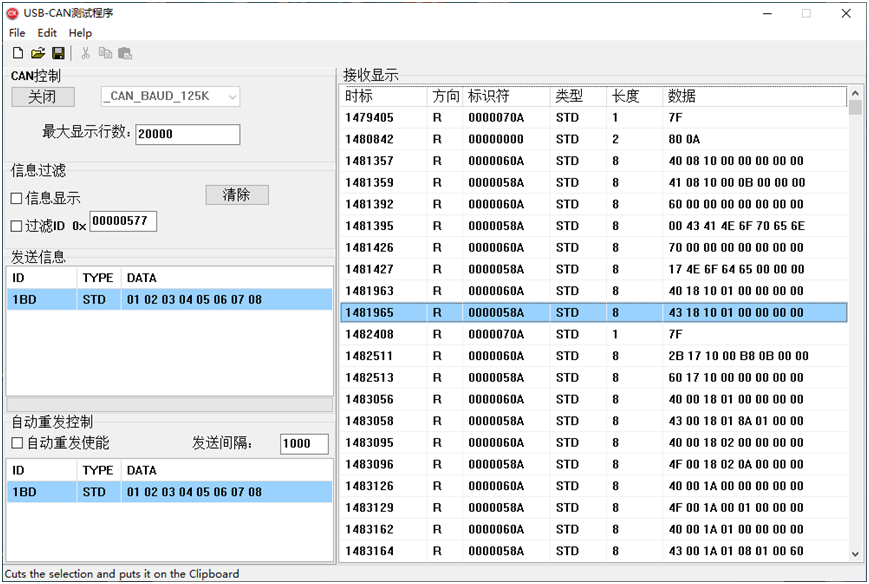
设备启动时:
如下图所示,首先发送0x70A 1 0x00 表示设备上线,然后循环发送0x70A 1 0x7F 表示CANOpen设备进入到预操作状态,等待CANOpen主机的进一步操作。

主机启动:
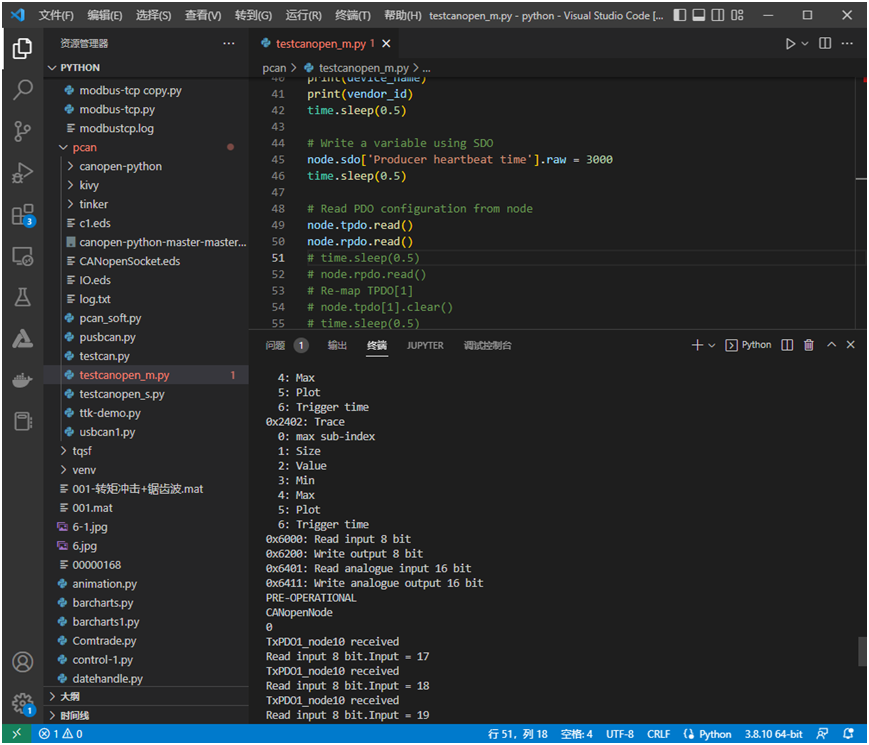
主机输出log信息
PS D:\MyProg\python> & "C:/Program
Files/Python38/python.exe" d:/MyProg/python/pcan/testcanopen_m.py
0x1000: Device type
省略部分信息
0x100A: Manufacturer software version
0x1018: Identity
0: max sub-index
1: Vendor-ID
2: Product code
3: Revision number
4: Serial number
0x1800: TPDO communication parameter
0: max sub-index
1: COB-ID used by TPDO
2: transmission type
3: inhibit time
4: compatibility entry
5: event timer
6: SYNC start value
0x1801: TPDO communication parameter
0: max sub-index
1: COB-ID used by TPDO
2: transmission type
3: inhibit time
4: compatibility entry
5: event timer
6: SYNC start value
省略部分信息
0x6000: Read input 8 bit
省略部分信息
PRE-OPERATIONAL(当前设备状态)
CANopenNode(Manufacturer device name)
0
(Vendor id)
(主机读取TPDO和RPDO配置信息)
(以下为设备转如操作状态,同时主机提供同步信号)
TxPDO1_node10 received
Read input 8 bit.Input = 17
TxPDO1_node10 received
Read input 8 bit.Input = 18
TxPDO1_node10 received
Read input 8 bit.Input = 19
主机控制设备进入预操作状态,并读取厂商信息和id
主机读取TPDO和RPDO配置信息
主机启动设备进入操作模式,并且提供同步信号。
主机操作设备进入操作状态,0x000 2 0x01 0x0A
设备进入操作状态: 0x70A 1 0x05
主机启动同步信息 0x080 ,同步信号间隔0.1秒
在同步信号的作用下,从机间隔10个同步信号,发送给意思TPDO[1]信息。TPDO[1] 配置为同步10次,循环发送。从发送的CAN总线监视设备上可以清晰的观察到间隔10个ID = 0x080的同步帧后,设备发送了一个ID = 0x18A的TPDO[1]数据帧。数据帧中包含1个字节的开关量输入数据,这个数据认为处理为每秒加1,所以我们可以看到ID=0x18A的数据在逐次递增。
到此,执行CANOPEN协议的设备已经正确的运行起来了。
 电子发烧友论坛
电子发烧友论坛 /9
/9 



 工商网监
湘ICP备2023018690号
工商网监
湘ICP备2023018690号




 3205
3205








 淘帖
淘帖




