开发流程
1、RT-Smart 环境搭
下载 RT-Smart 用户态应用代码
进入到 userapps 目录,克隆 RT-Thread rt-smart 分支
更详细环境配置请移步到—> RT-Thread-优雅の在D1S上运行RT-Smart
2、配置工具链
在 userapps/tools 目录下运行 get_toolchain.py 的脚本,会下载对应的工具链并展开到 userapps/tools/gun_gcc 目录。后面的工具链名称可以是 arm | riscv64。
这里以手上的 D1s 为例,D1s 是 RISCV-64 架构的,所以输入下面的命令:
python3 get_toolchain.py riscv64
在 userapps 目录下,运行 smart-env.sh 配置工具链路径,目前支持的参数可以是 arm | riscv64
source smart-env.sh riscv64
3、获取 lvgl 主线代码
进入到 userapps 目录,新建 media 文件夹来存放 lvgl 相关的代码,克隆 lvgl 主线代码到本地
4、内核驱动实现
显示部分:
这部分我们可以参考 qemu-vexpress-a9 中 drv_clcd.c 的实现方法。在用户态,要是想获取并操作 lcd,驱动至少需要实现:
drv_clcd_init + drv_clcd_control 两个 ops 函数。
在 drv_clcd_control 中,我们需要对以下几种 cmd 进行处理:
RTGRAPHIC_CTRL_RECT_UPDATE:通知更新图形设备
RTGRAPHIC_CTRL_GET_INFO:获取 LCD 的基本信息,包括像素像素格式,分辨率等
FBIOGET_FSCREENINFO:获取 FrameBuffer 设备的固定参数信息。固定参数信息使用 struct fb_fix_screeninfo 结构体来描述
FBIOGET_VSCREENINFO:获取 LCD 的可变参数信息,包括屏幕的像素,尺寸等信息
触摸部分:
用户态要是想获取触摸芯片的坐标,底层驱动至少需要实现 touch_ops 的:probe + init + read_point,即探测,初始化,读取触摸设备的函数。
5、用户态接口对接
用户态目录结构如下,需要在 media/lvgl/ 目录下新建名为 lv_rtt_port 、packages 等文件夹。
lvgl
├── lv_rtt_port
│ ├── SConscript
│ ├── lv_conf.h
│ ├── lv_port_disp.c
│ └── lv_port_indev.c
├── packages
│ ├── LVGL-latest
│ ├── lv_music_demo-latest
│ └── SConscript
├── SConscript
├── SConstruct
├── pkg_config.h
lv_rtt_port 是移植的关键部分对接程序,包括了显示,触摸接口,主要需要我们自己编写。
LVGL-latest 从 https://github.com/lvgl/lvgl上获取最新代码,不需要修改。
lv_music_demo-latest 是 lvgl 的 音乐播放器 demo,不需要修改。
lv_conf.h 文件由 lvgl目录中的 lvgl_conf_template.h 修改而来。配置如下,具体可以按照自己的屏幕参数修改。
#define LV_COLOR_16_SWAP 1
#define LV_COLOR_DEPTH 32
#define LV_USE_PERF_MONITOR 1
/* music player demo */
#define LV_USE_DEMO_RTT_MUSIC 1
#define LV_DEMO_RTT_MUSIC_AUTO_PLAY 1
#define LV_FONT_MONTSERRAT_12 1
#define LV_FONT_MONTSERRAT_16 1
#define LV_COLOR_SCREEN_TRANSP 1
5.1、显示接口
核心是在 lv_rtt_port 中,而具体需要关注的文件就是 lv_port_disp.c 文件,触摸我们可以先不急着加,先将显示接口对接上。
在 RT-Thread 中,主要通过 rt_device_xxx 来操作 LCD 设备,首先通过 rt_device_find 函数查找 lcd 设备,找到设备后可以通过 device 句柄来操作 lcd 设备。
/* LCD Device Init */
device = rt_device_find("lcd");
RT_ASSERT(device != RT_NULL);
if (rt_device_open(device, RT_DEVICE_OFLAG_RDWR) != RT_EOK)
{
rt_kprintf("open lcd devce fail\n");
return;
}
rt_device_control(device, RTGRAPHIC_CTRL_GET_INFO, &info);
rt_device_control(device, FBIOGET_FSCREENINFO, &fb_info);
用户态只要获取到 framebuffer 就可以进行对 lcd 进行操作了。
值得注意的是,在用户态我们不能直接使用 RTGRAPHIC_CTRL_GET_INFO 返回的 framebuffer 变量,而是需要使用 FBIOGET_FSCREENINFO 得到 smem_start (地址空间的起始地址),因为分配地址空间的起始地址与长度将会被填充到 fb_fix_screeninfo 结构的 smem_start 和 smem_len 的两个变量中。
于是,我们就可以通过向 smem_start 地址中填充颜色数据的方式让 lcd 显示各种颜色了。
5.2、触摸接口
触摸接口需要关注的文件是 lv_port_indev.c 文件,主要通过 rt_device_find 查找 touch 设备,找到设备后可以通过 device 句柄来操作 touch 设备。
#define POINT_NUMBER 1
static rt_device_t ts;
static struct rt_touch_data *read_data;
ts = rt_device_find("touch");
rt_device_open(ts, RT_DEVICE_FLAG_INT_RX);
read_data = (struct rt_touch_data *)rt_calloc(POINT_NUMBER, sizeof(struct rt_touch_data) * POINT_NUMBER);
获取坐标函数在调用 rt_device_read 函数后,入参 read_data 中就保存了坐标信息,然后传递给 LVGL 的 lv_indev_data_t 结构体中即可。
static bool touchpad_is_pressed(void)
{
if (POINT_NUMBER == rt_device_read(ts, 0, read_data, POINT_NUMBER))
{
if (read_data->event == RT_TOUCH_EVENT_MOVE)
{
/* swap x and y /
rt_uint16_t tmp_x = read_data->x_coordinate;
rt_uint16_t tmp_y = read_data->y_coordinate;
/ restore data */
last_x = tmp_x;
last_y = tmp_y;
return true;
}
}
return false;
}
static void touchpad_get_xy(rt_int16_t *x, rt_int16_t *y)
{
*x = last_x;
*y = last_y;
}
static void touchpad_read(lv_indev_drv_t *indev, lv_indev_data_t *data)
{
if (touchpad_is_pressed())
{
data->state = LV_INDEV_STATE_PRESSED;
touchpad_get_xy(&data->point.x, &data->point.y);
}
else
{
data->state = LV_INDEV_STATE_RELEASED;
}
}
6、最终效果
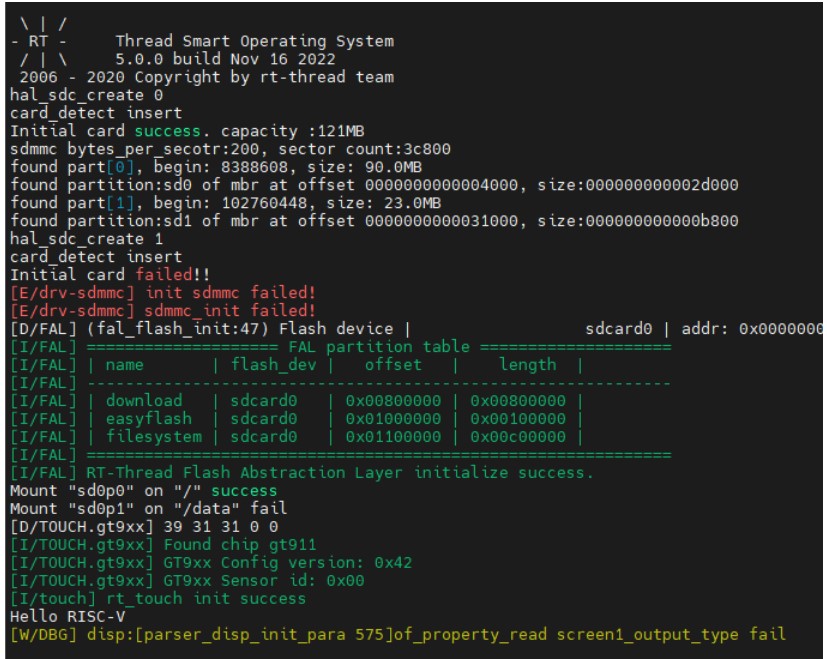
这里以柿饼派M7为例,将编译出来的用户态可执行文件打包,使用 xfel 工具烧录到板子上的 EMMC 中。在串口终端输入可执行文件名称来启动用户态程序。
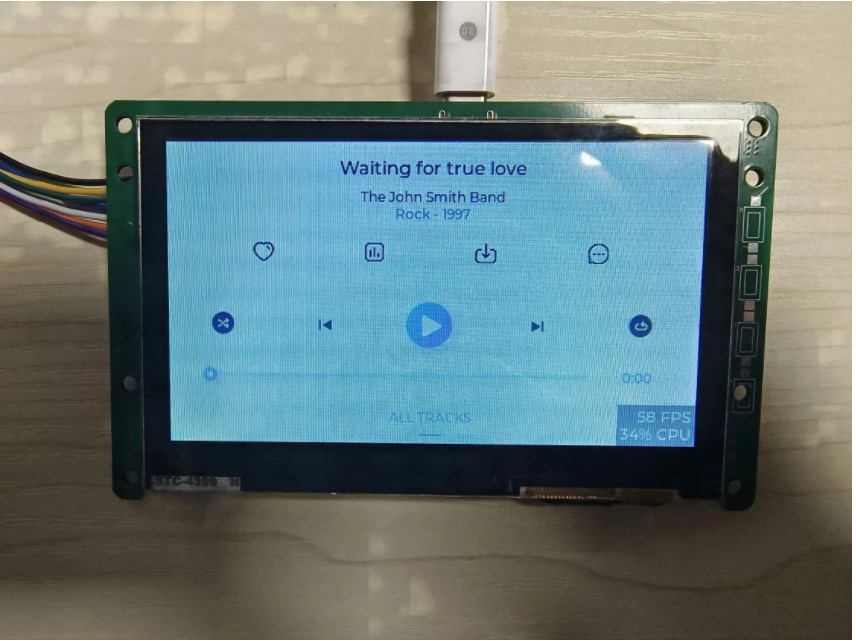
最终效果如下,在屏幕分辨率为 480*272,RGB565 32位色深下,lvgl 在用户态中的帧率整体保持在 60fps,满足了使用需求。
原作者:Rb君
 /6
/6 



 工商网监
湘ICP备2023018690号
工商网监
湘ICP备2023018690号






 856
856


 淘帖
淘帖





