Canny滤波器当然是最著名和最常用的边缘检测滤波器。我会逐步解释用于 轮廓检测的canny滤波器 。因为canny滤波器是一个多级滤波器。Canny过滤器很少被集成到深度学习模型中。所以我将描述不同的部分,同时使用Pytorch实现它。它可以几乎没有限制的进行定制,我允许自己一些偏差。
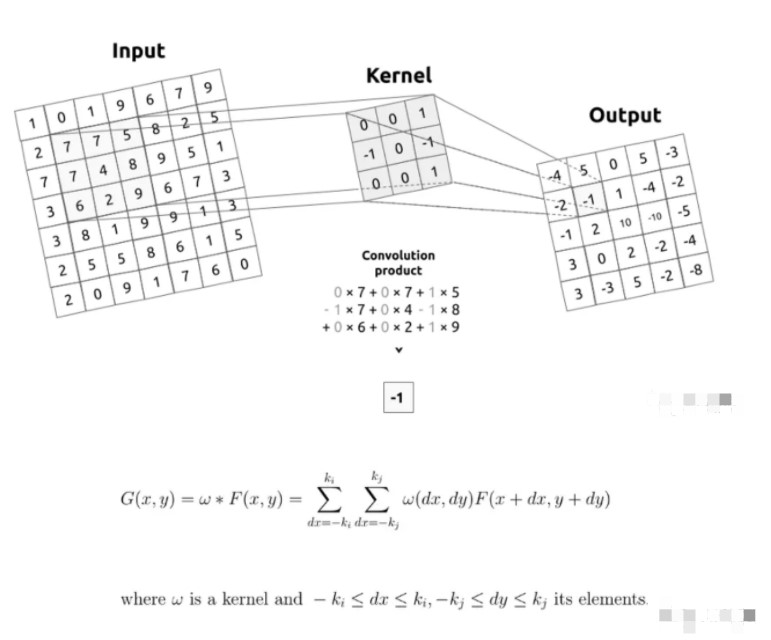
使用输入图像和kernel进行卷积
我来介绍一下什么是卷积矩阵,或者说核。卷积矩阵描述了我们要传递给输入图像的一个滤波器。为了简单起见,kernel将通过应用一个 卷积 ,从左到右,从上到下移动整个图像。这个操作的输出称为 图像滤波 。
高斯滤波器
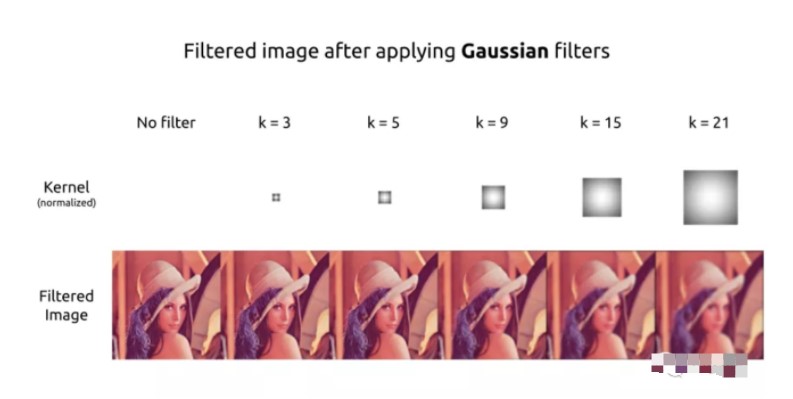
首先,我们通常通过应用一个模糊滤波器来消除输入图像中的噪声。这个滤波器的选择取决于你,但我们通常使用一个高斯滤波器。

高斯核
def get_gaussian_kernel(k=3, mu=0, sigma=1, normalize=True): # compute 1 dimension gaussian gaussian_1D = np.linspace(-1, 1, k) # compute a grid distance from center x, y = np.meshgrid(gaussian_1D, gaussian_1D) distance = (x ** 2 + y ** 2) ** 0.5 # compute the 2 dimension gaussian gaussian_2D = np.exp(-(distance - mu) ** 2 / (2 * sigma ** 2)) gaussian_2D = gaussian_2D / (2 * np.pi *sigma **2) # normalize part (mathematically) if normalize: gaussian_2D = gaussian_2D / np.sum(gaussian_2D) return gaussian_2D
可以制作不同大小的高斯核,或多或少都是居中或扁平的。显然,kernel越大,输出的图像越容易模糊。
Sobel 滤波
为了检测边缘,必须对图像应用一个滤波器来提取梯度。
在X上应用Sobel kernel
def get_sobel_kernel(k=3):
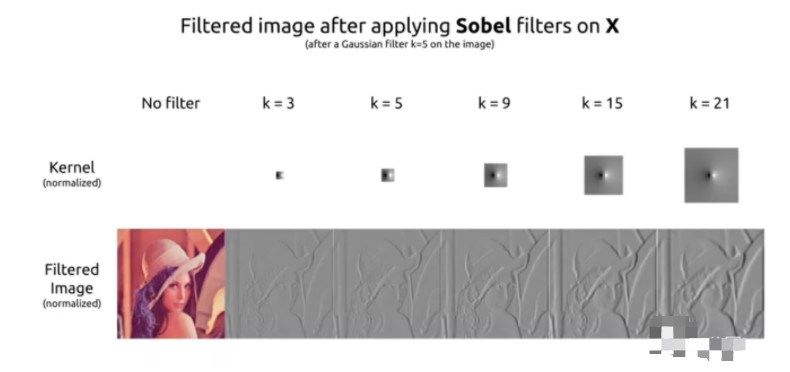
最常用的滤波器是Sobel滤波器。分解成两个滤波器,第一个核用于提取水平梯度。粗略地说,右边的像素比左边的像素越亮,过滤后的图像的结果就越高。反之亦然。这在Lena帽子的左边可以清楚地看到。
Y方向应用Sobel kernel
第二个核用于提取垂直的梯度。这个kernel是另一个的转置。这两个kernel具有相同的作用,但在不同的轴上。

计算梯度
现在,我们在图像的两个轴上都有了梯度。为了检测轮廓,我们需要梯度的 大小 。我们可以使用绝对值范数或 欧几里得范数 。
梯度的大小和方向
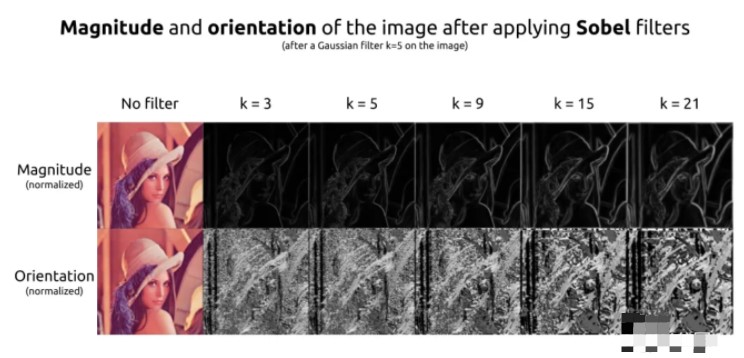
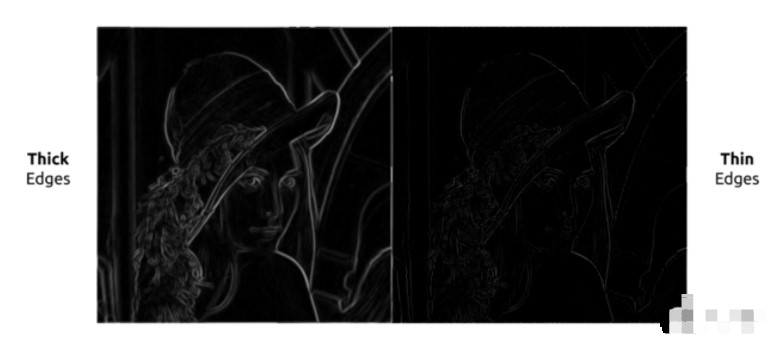
边缘现在使用我们的梯度的大小被完美地检测,但是很厚。如果我们能只保留轮廓的细线就好了。因此,我们同时计算我们的梯度的方向,这将用于保持这些细线。在Lena的图像中,梯度是由强度表示的,因为梯度的角度非常重要。
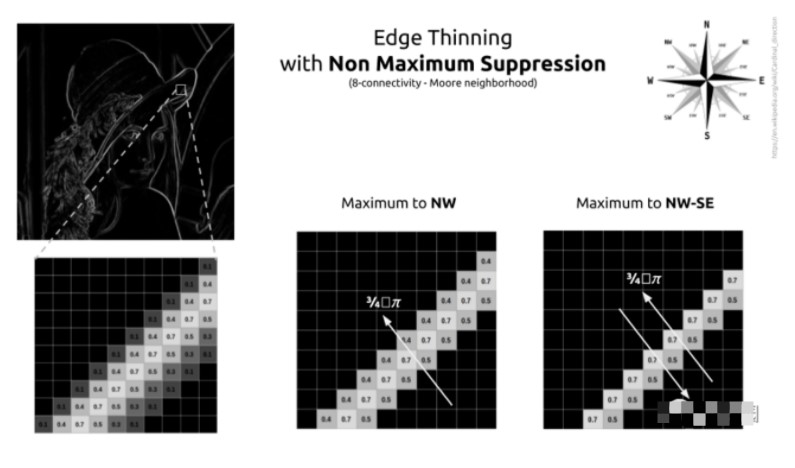
非极大值抑制
为了细化边缘,可以使用非最大抑制方法。在此之前,我们需要创建 45°× 45°方向的kernel 。
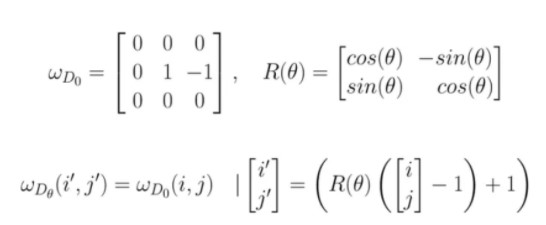
有方向的kernel
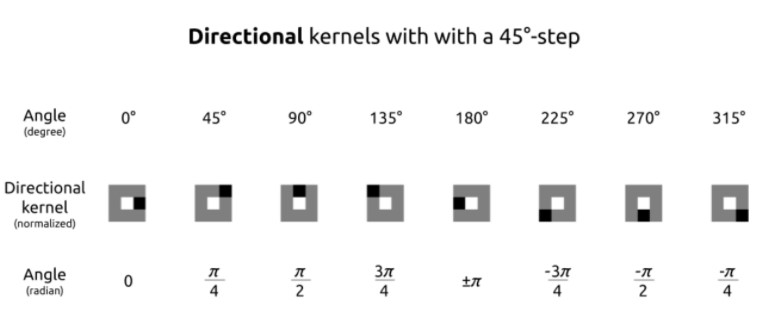
def get_thin_kernels(start=0, end=360, step=45): k_thin = 3 # actual size of the directional kernel # increase for a while to avoid interpolation when rotating k_increased = k_thin + 2 # get 0° angle directional kernel thin_kernel_0 = np.zeros((k_increased, k_increased)) thin_kernel_0[k_increased // 2, k_increased // 2] = 1 thin_kernel_0[k_increased // 2, k_increased // 2 + 1:] = -1 # rotate the 0° angle directional kernel to get the other ones thin_kernels = [] for angle in range(start, end, step): (h, w) = thin_kernel_0.shape # get the center to not rotate around the (0, 0) coord point center = (w // 2, h // 2) # apply rotation rotation_matrix = cv2.getRotationMatrix2D(center, angle, 1) kernel_angle_increased = cv2.warpAffine(thin_kernel_0, rotation_matrix, (w, h), cv2.INTER_NEAREST) # get the k=3 kerne kernel_angle = kernel_angle_increased[1:-1, 1:-1] is_diag = (abs(kernel_angle) == 1) # because of the interpolation kernel_angle = kernel_angle * is_diag # because of the interpolation thin_kernels.append(kernel_angle) return thin_kernels
因此,该过程要求检查 8邻域 (或称为Moore的邻域)。这个概念很容易理解。对于每个像素,我们将 检查方向 。我们要看看这个像素是否比它的邻居的梯度方向更强。如果是,那么我们将其与相反方向的相邻像素进行比较。如果这个像素与它的双向邻居相比具有 最大强度 ,那么它是 局部最大 。这个像素将被 保存 。在所有其他情况下,它不是一个局部最大值,像素被删除。
阈值和滞后
========
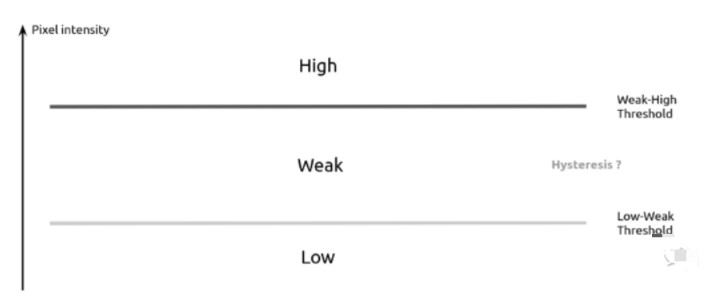
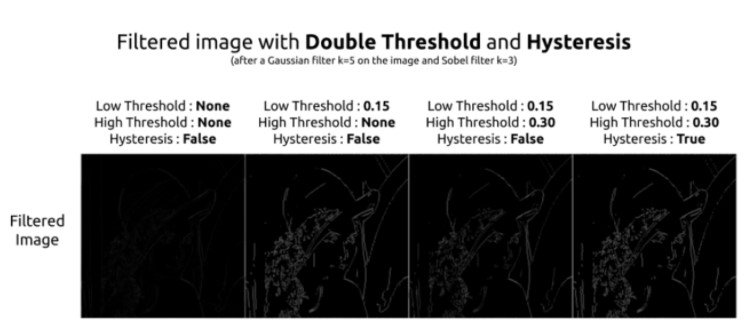
最后,只需要应用 阈值 。有三种方法可以做到这一点:
低-高阈值:将亮度高于阈值的像素设为1,其他设为0。
低-弱和弱-高阈值:我们设置高强度像素为1,低强度像素为0,介于两个阈值之间,我们设置它们为0.5,并被认为是弱像素。
低-弱和弱-高与 滞后 :同上,弱像素滞后进行评估,并重新分配为高或低。
阈值
“滞后是系统状态对其历史的依赖。”
在我们的例子中,滞后可以理解为一个像素对其相邻像素的依赖。在Canny滤波器的滞后步骤中,我们说如果一个弱像素在它的8个邻居中有一个高强度的邻居,那么它将被归类为高。
我喜欢使用不同的方法,我最后使用一个滤波器对弱像素进行分类。如果它的卷积乘积大于1那么我把它归为High。
滞后kernel
你说过用PyTorch的
是的,现在可以看看Pytorch代码了。所有的东西都被组合成一个 nn.Module 。我不能保证实现会得到优化。使用OpenCV的特性可以加快处理速度。但是这种实现至少具有灵活、可参数化和根据需要容易修改的优点。
class CannyFilter(nn.Module): def __init__(self, k_gaussian=3, mu=0, sigma=1, k_sobel=3, use_cuda=False): super(CannyFilter, self).__init__() # device self.device = 'cuda' if use_cuda else 'cpu' # gaussian gaussian_2D = get_gaussian_kernel(k_gaussian, mu, sigma) self.gaussian_filter = nn.Conv2d(in_channels=1, out_channels=1, kernel_size=k_gaussian, padding=k_gaussian // 2, bias=False) self.gaussian_filter.weight[:] = torch.from_numpy(gaussian_2D) # sobel sobel_2D = get_sobel_kernel(k_sobel) self.sobel_filter_x = nn.Conv2d(in_channels=1, out_channels=1, kernel_size=k_sobel, padding=k_sobel // 2, bias=False) self.sobel_filter_x.weight[:] = torch.from_numpy(sobel_2D) self.sobel_filter_y = nn.Conv2d(in_channels=1, out_channels=1, kernel_size=k_sobel, padding=k_sobel // 2, bias=False) self.sobel_filter_y.weight[:] = torch.from_numpy(sobel_2D.T) # thin thin_kernels = get_thin_kernels() directional_kernels = np.stack(thin_kernels) self.directional_filter = nn.Conv2d(in_channels=1, out_channels=8, kernel_size=thin_kernels[0].shape, padding=thin_kernels[0].shape[-1] // 2, bias=False) self.directional_filter.weight[:, 0] = torch.from_numpy(directional_kernels) # hysteresis hysteresis = np.ones((3, 3)) + 0.25 self.hysteresis = nn.Conv2d(in_channels=1, out_channels=1, kernel_size=3, padding=1, bias=False) self.hysteresis.weight[:] = torch.from_numpy(hysteresis) def forward(self, img, low_threshold=None, high_threshold=None, hysteresis=False): # set the setps tensors B, C, H, W = img.shape blurred = torch.zeros((B, C, H, W)).to(self.device) grad_x = torch.zeros((B, 1, H, W)).to(self.device) grad_y = torch.zeros((B, 1, H, W)).to(self.device) grad_magnitude = torch.zeros((B, 1, H, W)).to(self.device) grad_orientation = torch.zeros((B, 1, H, W)).to(self.device) # gaussian for c in range(C): blurred[:, c:c+1] = self.gaussian_filter(img[:, c:c+1]) grad_x = grad_x + self.sobel_filter_x(blurred[:, c:c+1]) grad_y = grad_y + self.sobel_filter_y(blurred[:, c:c+1]) # thick edges grad_x, grad_y = grad_x / C, grad_y / C grad_magnitude = (grad_x ** 2 + grad_y ** 2) ** 0.5 grad_orientation = torch.atan(grad_y / grad_x) grad_orientation = grad_orientation * (360 / np.pi) + 180 # convert to degree grad_orientation = torch.round(grad_orientation / 45) * 45 # keep a split by 45 # thin edges directional = self.directional_filter(grad_magnitude) # get indices of positive and negative directions positive_idx = (grad_orientation / 45) % 8 negative_idx = ((grad_orientation / 45) + 4) % 8 thin_edges = grad_magnitude.clone() # non maximum suppression direction by direction for pos_i in range(4): neg_i = pos_i + 4 # get the oriented grad for the angle is_oriented_i = (positive_idx == pos_i) * 1 is_oriented_i = is_oriented_i + (positive_idx == neg_i) * 1 pos_directional = directional[:, pos_i] neg_directional = directional[:, neg_i] selected_direction = torch.stack([pos_directional, neg_directional]) # get the local maximum pixels for the angle is_max = selected_direction.min(dim=0)[0] > 0.0 is_max = torch.unsqueeze(is_max, dim=1) # apply non maximum suppression to_remove = (is_max == 0) * 1 * (is_oriented_i) > 0 thin_edges[to_remove] = 0.0 # thresholds if low_threshold is not None: low = thin_edges > low_threshold if high_threshold is not None: high = thin_edges > high_threshold # get black/gray/white only thin_edges = low * 0.5 + high * 0.5 if hysteresis: # get weaks and check if they are high or not weak = (thin_edges == 0.5) * 1 weak_is_high = (self.hysteresis(thin_edges) > 1) * weak thin_edges = high * 1 + weak_is_high * 1 else: thin_edges = low * 1 return blurred, grad_x, grad_y, grad_magnitude, grad_orientation, thin_edges
原作者:Axel Thevenot
 /6
/6 



 工商网监
湘ICP备2023018690号
工商网监
湘ICP备2023018690号






 2450
2450















 淘帖
淘帖





