提到直流无刷电机,那不得不提的就是有刷电机了。有刷电机有一个比较令人讨厌的缺点:那就是“吵”。
因为电刷和换向环需要时刻不停地摩擦,才能给电枢供电。
所以,如果你想要一个“静音风扇”的话,肯定不能选使用了有刷电机的产品。
![IMG_256]()
并且电刷使用时间久了,比较容易损坏。电流较大的时候,你甚至可以看到电刷在换向的时候噼里啪啦地冒火花。
而这些缺点,在下面将要介绍的直流无刷电机(Brushless DC Motor)里,一样都没有!
我们将从以下四个方面来给大家介绍直流无刷电机(以下简称__BLDC__):
1,BLDC的优缺点;
2,BLDC的工作原理;
3,BLDC的控制方式;
4,BLDC的实际使用。
__1、BLDC的优缺点 __
直流无刷电机,从字面上看,其最大的特点,就是“无刷”,也就是没有电刷的意思。
就因为没有电刷,它非常完美地避开了有刷电机的那几个缺点。所以反过来说,它主要的优点就是:
1,寿命长;2,能够做到静音;3,效率高(损耗低);4,体积较小;5,稳定性高。
__1.无刷直流电机运行的速度范围比较宽泛,在任意的速度下,都可以全功率运行。
2.过载能力突出,运行效率高。
3.无刷直流电机相对于有刷电机来说,体积更小,适用范围更广,功率密度较高。
4.和异步电机的驱动控制相比,驱动更加简单化。
5.无刷直流电机没有机械换向器结构,里面封闭,可以避免飞尘颗粒进入电机内部,导致出现各种各样的毛病,可靠性高。
6.外特性较好,低速运行,可输出大转矩,可以提供比较大的启动转矩。__
__2、 BLDC的工作原理 __
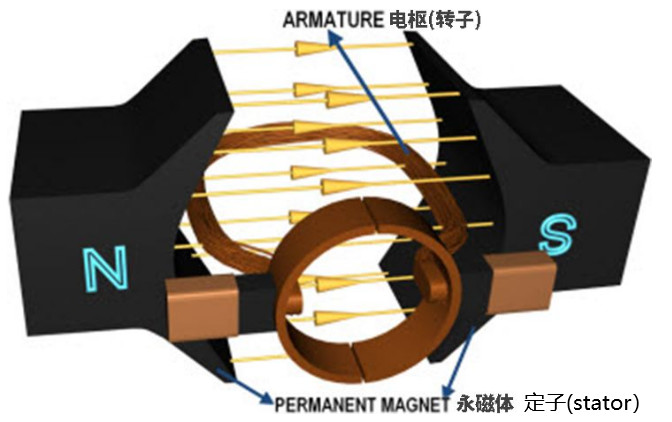
BLDC是电机的一种,所以它最基本的构成也离不开__定子__(stator)和__转子__(rotor)。
有刷电机的__定子__是__永磁体__,而它的__转子__,则是通电的__线圈__(绕组)。如下图:
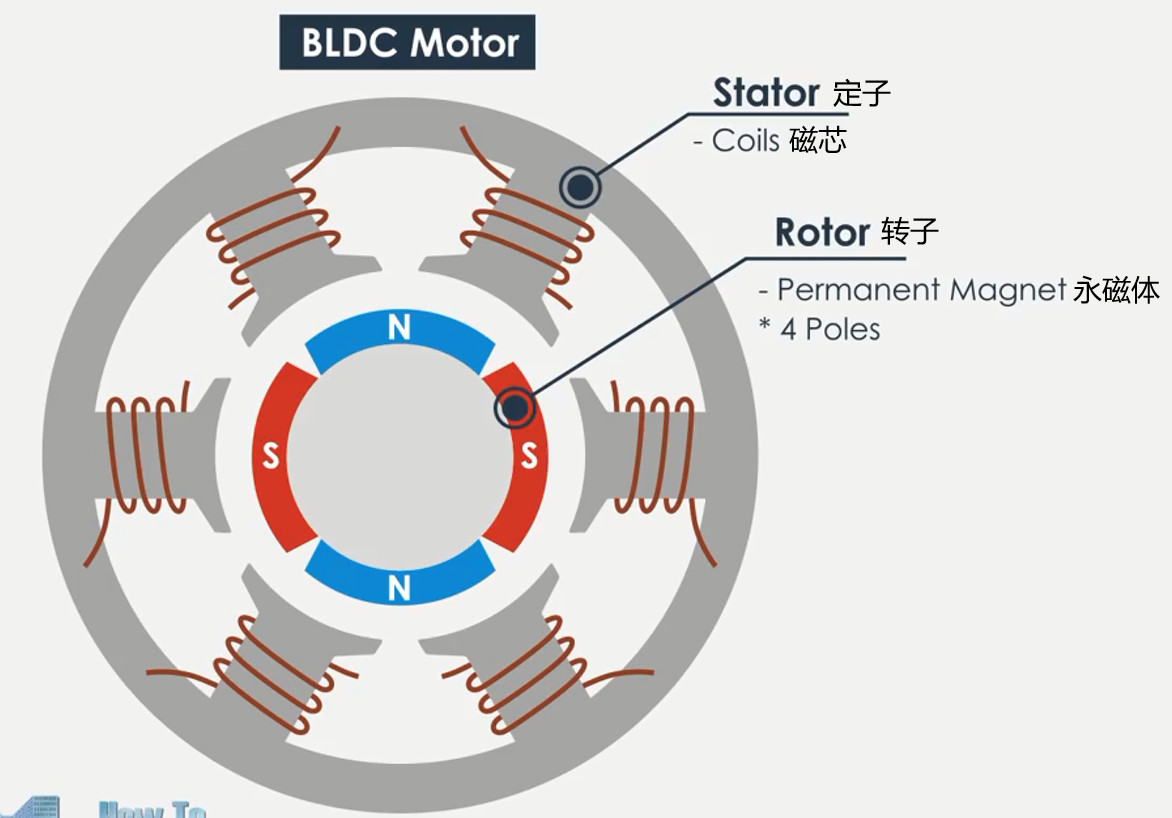
但是对于BLDC来说,情况__恰恰相反__!
BLDC的__定子__(stator)是__通电的线圈,而__转子(rotor)却是__永磁体!__
从“麦克斯韦-安培定律”可以知道,通电线圈附近的空间会产生磁场。而磁场的分布方向,我们可以用__“右手定则”__得出。如下图:
![IMG_259]()
其实这就是我们常说的“电磁铁”了!
那么接下来的事情就简单了,磁铁的特性是什么?
同性相斥,异性相吸!
所以,我们只要给定子上的线圈接入方向适当的电流,
即让电磁铁的磁极方向和永磁体的磁极方向正好对应,不就能排斥、或者吸引转子做旋转运动了。
![IMG_260]()
上图就是按顺序单独给线圈通电,使其朝向转子的方向为电磁铁的S极,吸引转子顺时针方向旋转。
定子的优化
以上的驱动方式,即按顺序单独给每个线圈通电,虽然可行,但是未免太过繁琐,效率低下。
因此,实际上的BLDC会将那六个线圈两两组合,分成A,B,C三个绕组,如下图:
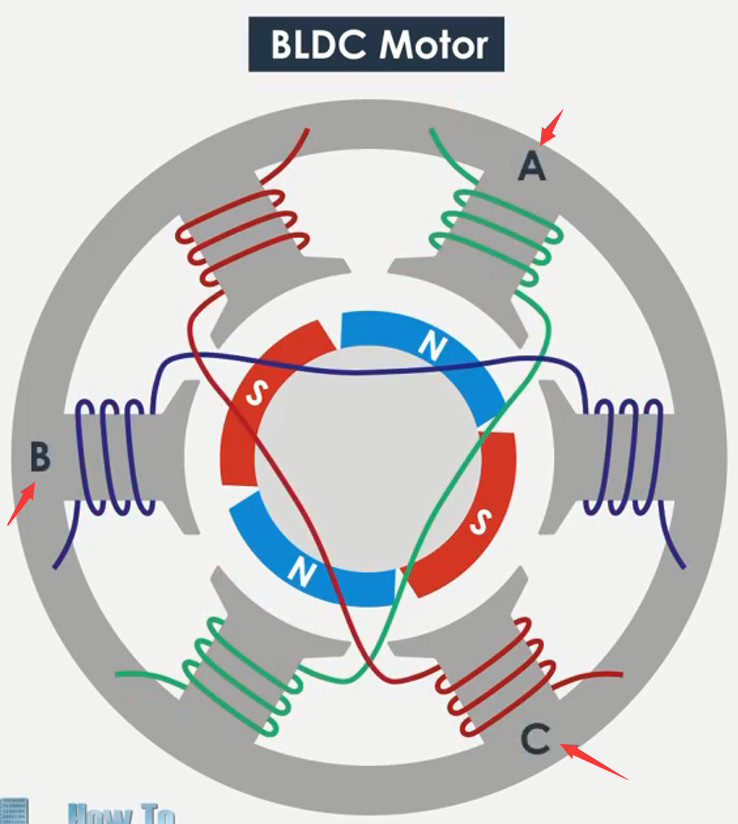
这样我们就可以同时驱动两个电磁铁了,效率立马提高了一倍。
但是这还只是用了磁铁“吸引”的特性,别忘了磁铁还有“排斥”的特性。
如果我们再同时驱动另外一组线圈,让上一组线圈“吸引”转子的时候,另外一组线圈“排斥”转子,那么我们的转子将会获得__更高的驱动力__!
如下图:
到目前为止,这个模型已经开始接近实际的BLDC产品了。
但是对于上面的模型,
我们需要给两个绕组同时提供方向相反的两组电源,才能同时达到“吸引”和“排斥”的效果。
这对于实际应用来讲,未免过于复杂,成本也太高。
接下来我们要讲的“BLDC的控制方式”,将会解决上面这个问题。
__3、BLDC的控制方式 __
原来的A,B,C三个绕组是各自独立的,因此控制起来非常麻烦。
那如果我们把A,B,C三个绕组接在一起,拼成一个“星形连接(star arrangement)”,结果会是怎么样?
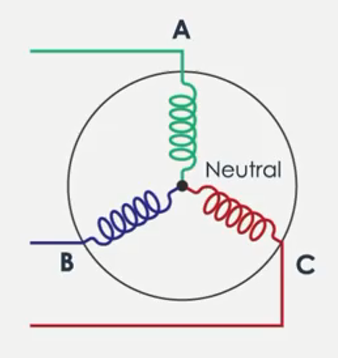
本来三个绕组,引出__六根线__;现在引出的线减少到只有__三根线__,那么这么接怎么实现跟六根线一样的控制效果呢?
如下图:
电源正极接在__右上角的A绕组__输入,而电源的负极接在了__左下角的B绕组__输出。
这个时候A绕组和B绕组同时被驱动,而且其极性正好相反,实现了三个绕组独立驱动时一样的效果!
所以只要按照这个顺序:AB-AC-BC-BA-CA-CB,这__六个节拍__,依次循环驱动定子的绕组,转子就能一直旋转下去!
可以使用六个电子开关来实现这六个节拍的驱动,如下图:
![IMG_265]()
__ 位置检测 __
我们虽然已经知道了控制转子的六个节拍的方法。
但是你有没有发现一个新的问题:如果不知道转子的位置,如何知道何时该驱动哪个绕组?
所以我们必须要知道转子的__当前位置__!
而转子的位置检测,一般有__两种方式__:
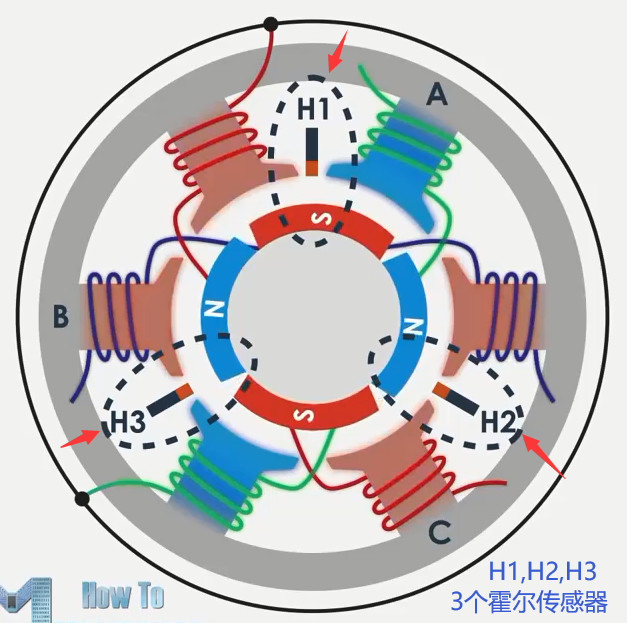
1,霍尔传感器检测法;
如下图,在定子里放上H1,H2,H3,三个霍尔传感器,就可以知道当前的定子的确切位置。
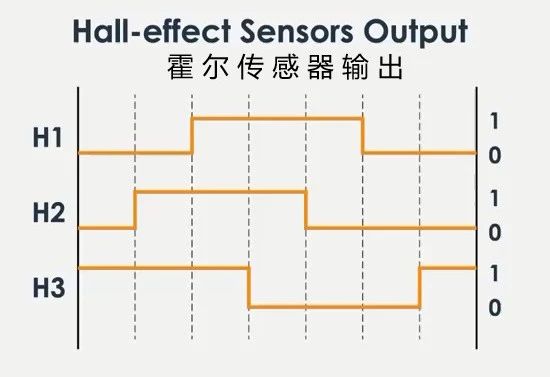
霍尔传感器的输出用高低电平来表示:
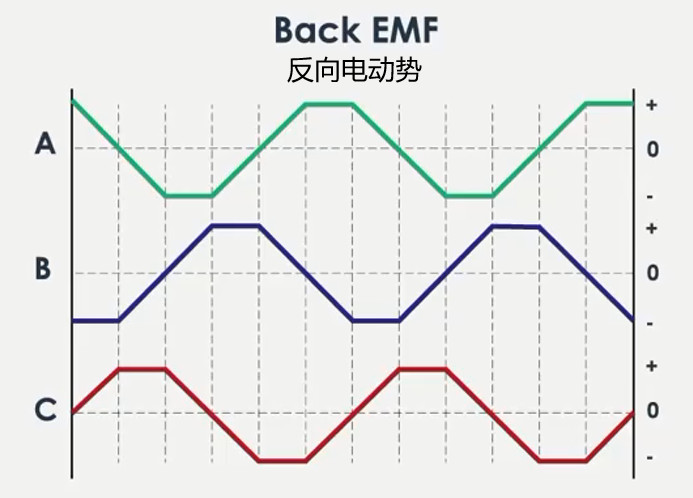
2,反向电动势检测法
反向电动势(Back EMF)检测法是基于电磁感应原理:
当没有通电的绕组周围的磁场(磁通量)改变时,会在这个绕组上感应出一个电动势,
我们只要检测这个电动势的大小和方向,也能知道当前定子的位置。
这两种检测方式各有优缺点:
__霍尔传感器检测精度更高__一点,但是成本也较高;
相反,反向电动势检测法经济性更好,但是精度稍低。
内转子 or 外转子 __
BLDC有两种结构:转子在内的叫做__内转子BLDC;相反,转子在外的叫做__外转子BLDC__。
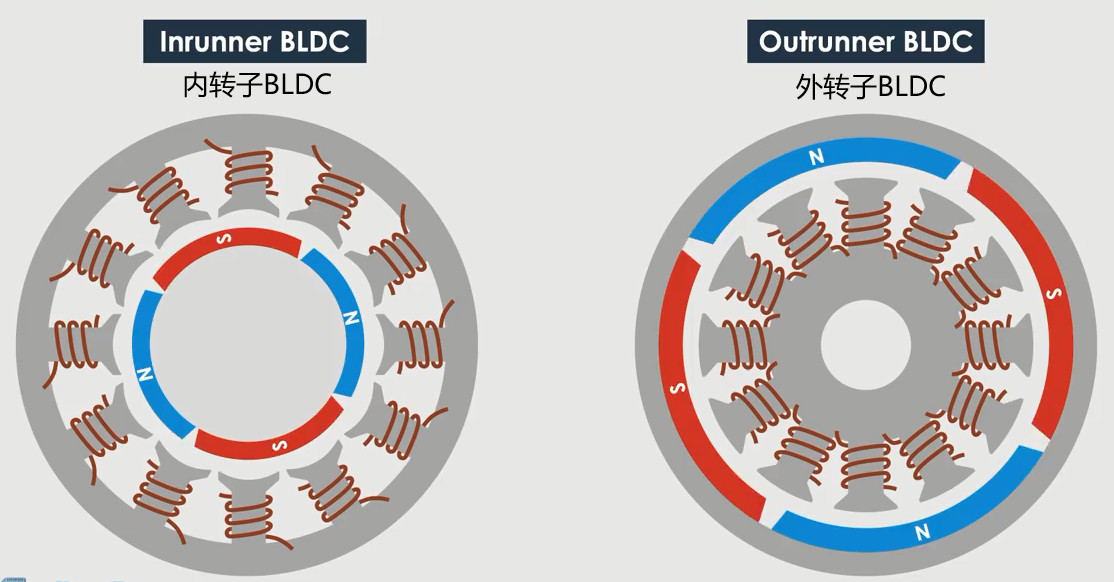
相对来说,外转子BLDC应用更多一点。
主要原因是外转子BLDC在机械结构上更稳定。这是因为电机转子在高速运行下,由于离心力的作用,会有向外扩张的趋势。
所以内转子BLDC需要非常高的机械精度,保证转子和定子不会打架。
但是如果预留的距离太远,又会导致__漏磁__而影响电机的整体效率。
但是在外转子BLDC上却没有这个问题,因为外转子天然不受扩张影响。
BLDC的缺点
我们现在再回到前面遗留下的问题:BLDC的缺点是什么?
相信你已经猜到:我们花了那么多的篇幅来讲BLDC的控制方式,足以看到其控制的难度,相对于有刷电机来说,是高出了不少的!
所以说BLDC最大的缺点,就是他的__控制难度高__,驱动电调(Electronic Speed Control,简称ESC)价格较高。
它还有一个缺点,就是BLDC由于__感抗__的原因,启动时会伴随着__抖动__,不像有刷电机的启动那么平稳。
目前主流的无刷电机控制方式有如下三种:
1、方波控制:
也称为梯形波控制、120°控制、6步换向控制
方波控制方式的优点是控制算法简单、硬件成本较低,使用性能普通的控制器便能获得较高的电机转速;
缺点是转矩波动大、存在一定的电流噪声、效率达不到最大值。方波控制适用于对电机转动性能要求不高的场合。
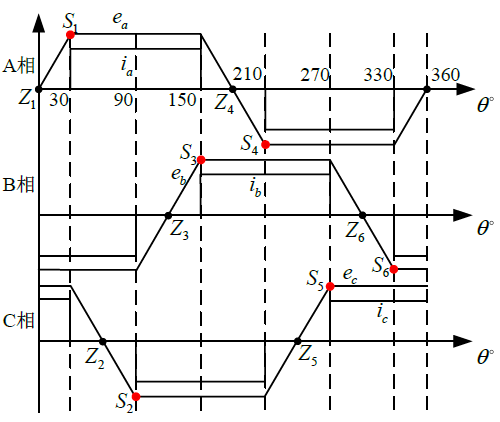
方波控制使用霍尔传感器或者无感估算算法获得电机转子的位置,然后根据转子的位置在360°的电气周期内,进行6次换向(每60°换向一次)。
每个换向位置电机输出特定方向的力,因此可以说方波控制的位置精度是电气60°。
由于在这种方式控制下,电机的相电流波形接近方波,所以称为方波控制。
2、正弦波控制:
正弦波控制方式使用的是SVPWM波,输出的是3相正弦波电压,相应的电流也是正弦波电流。
这种方式没有方波控制换向的概念,或者认为一个电气周期内进行了无限多次的换向。
显然,正弦波控制相比方波控制,其转矩波动较小,电流谐波少,控制起来感觉比较“细腻”,但是对控制器的性能要求稍高于方波控制,而且电机效率不能发挥到最大值。
3、FOC控制
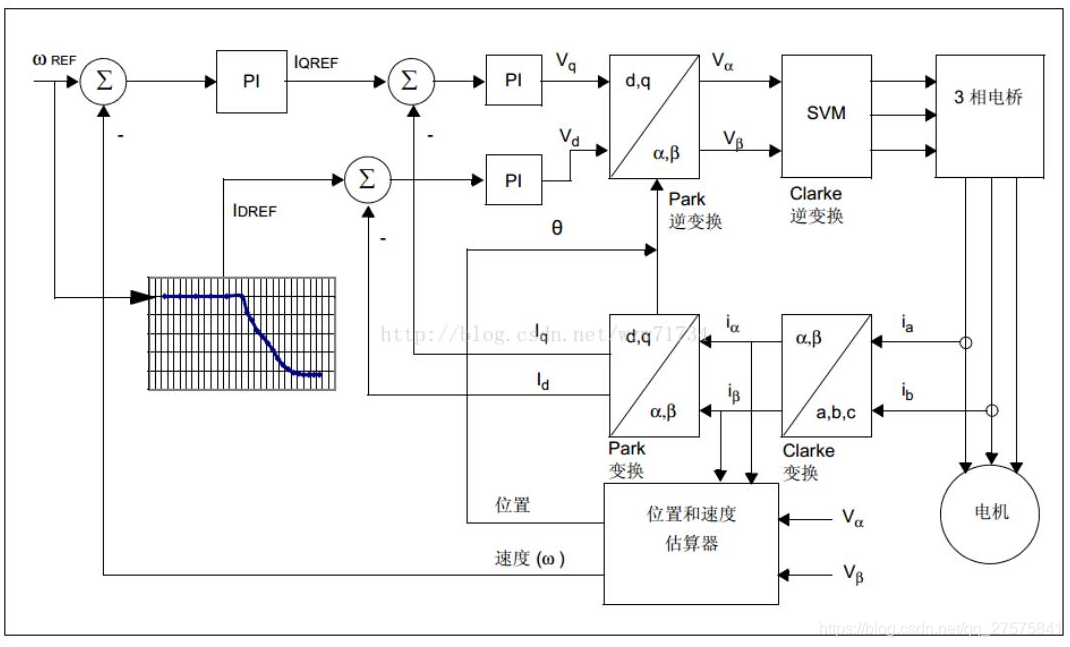
又称为矢量变频、磁场矢量定向控制
正弦波控制实现了电压矢量的控制,间接实现了电流大小的控制,但是无法控制电流的方向。
FOC控制方式可以认为是正弦波控制的升级版本,实现了电流矢量的控制,也即实现了电机定子磁场的矢量控制。
由于控制了电机定子磁场的方向,所以可以使电机定子磁场与转子磁场时刻保持在90°,实现一定电流下的最大转矩输出。
FOC控制方式的优点是:转矩波动小、效率高、噪声小、动态响应快;
缺点是:硬件成本较高、对控制器性能有较高要求,电机参数需匹配。
FOC是目前无刷直流电机(BLDC)和永磁同步电机(PMSM)高效控制的最佳选择。
FOC精确地控制磁场大小与方向,使得电机转矩平稳、噪声小、效率高,并且具有高速的动态响应。
由于FOC的优势明显,目前很多公司已在众多应用上逐步用FOC替代传统产品的控制方式。
德国Trinamic有一款__带有磁场矢量控制(FOC)的伺服控制芯片---__[TMC4671-LA](https://www.cnblogs.com/xing2/p/16696402.html" \t "https://i.cnblogs.com/posts/_blank)
- 转矩控制模式
- 速度控制模式
- 位置控制模式
- 电流控制刷新频率和最大的PWM频率为100KHz (速度和位置控制的刷新频率可以根据当前电流刷新频率的倍数配置)

TMC4671是一款完全集成伺服控制芯片,为直流无刷电机、永磁同步电机、2相步进电机、直流有刷电机和音圈电机提供磁场定向控制。
所有的控制功能都被集成在硬件上。集成了ADCs、位置传感器接口、位置差值器,该款功能齐全的伺服控制器,适用于各种伺服应用。
那接下来我们就来看看,BLDC的实际应用场景。
4、BLDC的实际应用
1、静音散热风扇风冷是很多设备散热的首选。
例如市面上很多主打“静音”的机箱,如果是使用风冷,里面的散热风扇基本都是使用BLDC。
用来给笔记本电脑散热的底座也常用BLDC,除此之外,一些大型的通风散热系统里面,使用的也是BLDC风扇。
还有高速风筒之类的产品。
2、多轴无人机较大功率使用的都是BLDC,适配上合适的电调(ESC),再使用PWM来控制BLDC调速是非常方便的。

3、电动工具之类的产品,比如电批,国内生产的电扳手基本上都使用了BLDC,还有大部分的手电钻也一样。
主要是因为BLDC的高效率,而使得电池供电的电动工具续航时间更长。还有一点是无刷电机的扭矩输出非常稳定。
还有冰箱压缩机,冰柜冷却风机,以及近几年很火的空气净化器、吸尘器/扫地机器人、筋膜枪等,大部分使用的都是BLDC驱动。
 /9
/9 



 工商网监
湘ICP备2023018690号
工商网监
湘ICP备2023018690号


















 淘帖
淘帖 32091
32091





