

反馈又称回馈,是控制论的基本概念,指将系统的输出返回到输入端并以某种方式改变输入,进而影响系统功能的过程;而使输出起到与输入相反的作用,使系统输出与系统目标的误差减小,系统趋于稳定的反馈称为负反馈。(百度)
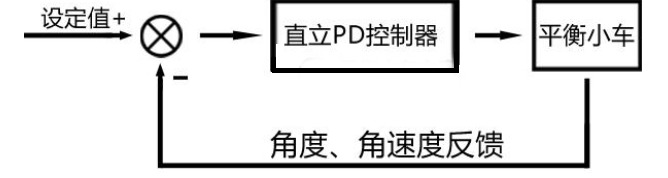
保持小车稳定平衡的条件是:能够精确测量小车倾角θ的大小和角速度θ ’ 的大小以及可以控制车轮的加速度。(直立行车参考设计方案第二版)直立控制主要是保证小车在运行过程中保持在一个理想的角度,这个理想的角度一般由小车的机械零点决定。这个点在实际中大多指的是一个范围。(如果在单纯调试直立环的时候调了很多组参数小车的平衡效果还是不好,不妨尝试一下在直立控制的程序中加上或者减去一个小一些的数值)


要调节小车的倾角,首先需要获取小车电机的转动速度,一般都是通过编码器来获取。某宝上大多数平衡小车的车模都是带有编码器的,引出AB两相,因为stm32的定时器有编码器模式,因此特定的GPIO口可以直接连接电机上的编码器接口,从而读取脉冲,获得速度值。
由于存在安装误差,传感器实际测量的角度与车模角度有偏差,因此车模实际不是保持与地面垂直,而是存在一个倾角,在重力的作用下,车模就会朝倾斜的方向加速前进。平衡小车的速度是通过调节小车倾角来完成的,平衡小车不同的倾角会引起车模的加减速,从而达到对于速度的控制。

脉冲宽度调制(PWM),是英文“Pulse Width Modulation” 的缩写,简称脉宽调制,是利用微处理器的数字输出来对模拟电路进行控制的一种非常有效的技术。因为我们在驱动电机的时候是希望它按照一定的速度行驶的,如果直接赋值高低电平来控制,则达不到我们要的控制效果。利用定时器输出PWM波则可以实现上述要求。STM32 的定时器除了除了基本定时器TIM6和TIM7外,其他的定时器都可以用来产生 PWM 输出。其中高级定时器 TIM1 和 TIM8 可以同时产生多达 7 路的 PWM 输出。而通用定时器也能同时产生多达 4路的 PWM 输出。







 举报
举报
更多回帖


