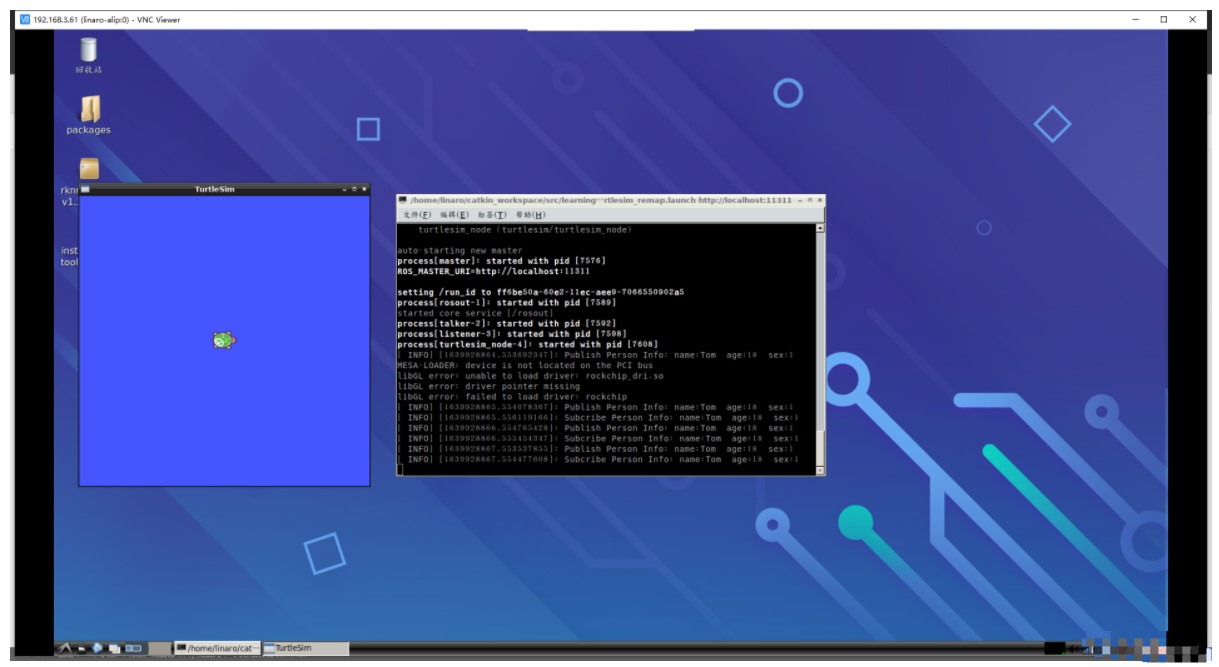
Launch文件:通过XML文件实现多节点的配置和启动(可自动启动ROS Master)
Launch文件语法
< l a u n c h >
launch文件中的根元素采用< < >>标签定义
< n o d e >
pkg:节点所在的功能包名称
type:节点的可执行文件名称
name:节点运行时的名称
output, respawn, required, ns, args
参数设置
< p a r a m > / < r o s p a r a m >
设置ROS系统运行中的参数,存储在参数服务器中。
name:参数名
value:参数值
加载参数文件中的多个参数:
< a r g >
launch文件内部的局部变量,仅限于launch文件使用
name:参数名
value:参数值
调用:
< r e m a p >
重映射ROS计算图资源的命名。
from:原命名
to:映射之后的命名
< i n c l u d e >
包含其他launch文件,类似C语言中的头文件包含。
file:包含的其他launch文件路径
更多标签可参见:http://wiki.ros.org/roslaunch/XML
实验
创建功能包
cd ~/catkin_workspace/src
catkin_create_pkg learning_launch
cd learning_launch
mkdir launch
例子
simple.launch
nano ~/catkin_workspace/src/learning_launch/launch/simple.launch
Launch文件:通过XML文件实现多节点的配置和启动(可自动启动ROS Master)
Launch文件语法
< l a u n c h >
launch文件中的根元素采用< < >>标签定义
< n o d e >
pkg:节点所在的功能包名称
type:节点的可执行文件名称
name:节点运行时的名称
output, respawn, required, ns, args
参数设置
< p a r a m > / < r o s p a r a m >
设置ROS系统运行中的参数,存储在参数服务器中。
name:参数名
value:参数值
加载参数文件中的多个参数:
< a r g >
launch文件内部的局部变量,仅限于launch文件使用
name:参数名
value:参数值
调用:
< r e m a p >
重映射ROS计算图资源的命名。
from:原命名
to:映射之后的命名
< i n c l u d e >
包含其他launch文件,类似C语言中的头文件包含。
file:包含的其他launch文件路径
更多标签可参见:http://wiki.ros.org/roslaunch/XML
实验
创建功能包
cd ~/catkin_workspace/src
catkin_create_pkg learning_launch
cd learning_launch
mkdir launch
例子
simple.launch
nano ~/catkin_workspace/src/learning_launch/launch/simple.launch



 举报
举报



