STM32
登录
直播中
王芳
7年用户
1317经验值
私信
关注
[问答]
如何去制作一种基于STM32F407核心板的模拟电磁曲射炮呢
开启该帖子的消息推送
STM32F407
核心板
线圈
如何去制作一种基于
STM32
F407核心板的模拟电磁曲射炮呢?有哪些设计步骤?
回帖
(1)
王娜
2021-12-23 09:16:06
题目
1 电磁炮制作
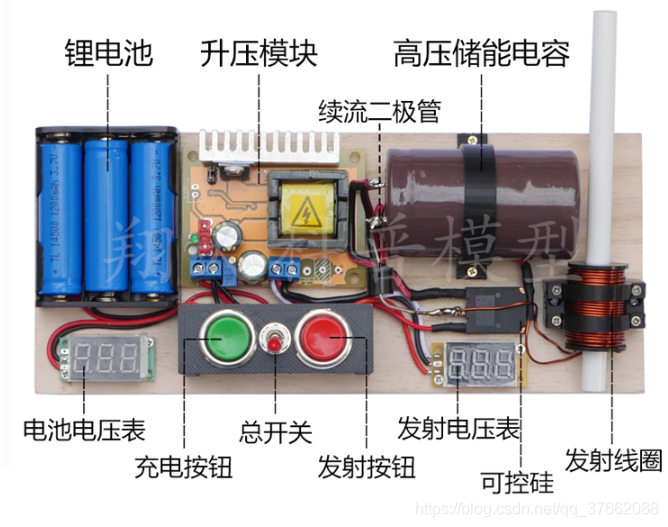
不管得分点是什么,电磁炮是一定要做的。不过我们取了巧,直接在网上买了个成品套件。如图,图片来自淘宝,侵删。
原理还是比较简单,升压给电容充电,电容通过线圈产生磁场,磁场吸引钢珠。但是东西回来后,我们做了一些改动。
1.1 线圈制作
因为商家配的管子内径没有10mm(题目要求10mm-15mm)所以我们得重新绕。管子用的塑料管,
我们经过简单的讨论决定采用10mm内径的,然后弹丸也用10mm钢珠,因为第一感觉就是越小越好,越小所需能量越少。事实证明有时候第一感觉不一定是最优的。这个后面再谈
线圈参数
,我们决定绕8层,每层30匝,一共240匝,后经大神指点,这个匝数在合理范围内。大家绕的话,200-300都是可以的。匝数大了的话,电阻也会大,效果不一定更好。
漆包线直径
我们选的1mm,也有同学用0.8mm,事实证明都能用。
漆包线如果不好固定的话,可以上502胶水,至于两边,大家可以试试电工胶,或者3M胶布叠起来,或其他能卡住的东西都行。我们最后是用雕刻机雕的件卡的。
1.2 主控及模块
主控
我们自己画了一个STM32F407核心板。没有的同学完全可以用网上买的核心板。
视觉
毫无疑问的我们买了OPENMV,比赛的时候我们用的长焦镜头
测距
这个用的激光测距模块,有点小贵。群里有人用超声波模块,可以试试,可能效果不太好
键盘
这个一般人都用的矩阵键盘,但是我们买了串口屏 ,如图。串口屏的好处是,简单易上手,不用写矩阵键盘的行列扫描程序。用矩阵键盘的话大家一定要多买几个,容易坏。
事实上,普通的两个舵机的也能用,因为我们基本上都选择了只把炮口放最后一级舵机上。所以重量不是很大,它对系统的要求是,射的时候要稳,毕竟有一些小小的冲击力,会让精度下降。
不过由于我们学校比较有钱,所以我们组最后选择了用两个42步进伺服电机做动力,优点是力矩大,缺点是得有起始点的卡位,而舵机的脉冲宽和角度直接对应。
顺带说一句,图里的餐桌转盘轴承的确好用。
2 测试调试加填坑
第一坑 弹丸选择
关于弹丸材料和形状,我们直接选择了钢珠。也许有人会用钢柱或者子弹形状的?
淘宝上有一些钢珠材料不一样,线圈对其没有吸引力。这种钢珠看起来亮一些,不那么容易生锈。大家买的时候不要买错了~~
然后钢珠的直径,我们一开始选择了和管子内径一样的10mm。后面经过实验,发现钢珠直径小一些的话,精度更好。所以我们后面选择6mm,至于为什么不用8mm的,因为8mm买的假货,吸不动……我的猜测是:钢珠大了,跟管内的摩擦会多一些,所以精度受了影响
第二坑 弹丸初始位置
弹丸在线圈的起始位置,到底放在哪比较好呢?
经过试错,我们发现,钢珠一半进线圈在相同条件能打的最远。
当位置选好后,大家一定要把限位的东西固定死。不然会影响后面的曲线拟合
第三坑 发射模式选择与adc采电压
发射模式,目前有两种选择。一是定角度变电压。一是定电压变角度。
从实验数据来看,两种都能用
最后一张为距离与角度的数据拟合,可以看出,在20°左右近似线性。事实上,我们选择了10°–30°的区间。
没错,我们大部分人都用的定电压变角度模式。用另外一个模式做的同学做的也不错。看大家选择了。
这两种模式,都非常依赖一个东西:对电压的准确和及时的测量。我们做的时候,ad采样数据的波形噪声很大,最严重的时候,同一个条件下,它有三个落点(心塞)。解决办法有,一是adc的电源做稳,ad软件平均滤波的个数多一点。 我们的做法是,不用adc,用比较器,比较器一端接电容分的压,另一端用滑动变阻器设置阈值电压(设置好之后就不用变了),比较器的输出接电磁阀,电磁阀做控制开关。完美避过ad采样的坑。
曲线拟合
从理论上讲,距离和角度的函数关系是隐函数。我们尝试求解过,后来发现还是拟合大法好。
我们选择的角度在10–30°,首先选择一个电压能打两米到三米。其次,测试每加一度,距离的变化,每一个角度至少实验10次,取平均值。最后用matlab拟合。
这一步非常有趣,因为我们机械和硬件都做得很稳,问题不多。有同学说他们的精度太差,不好做。有同学说他们晚上拟合的数据和早上拟合的数据差很多……(听着都心塞),测试的时候,一定要盯住电磁炮,一有不对立马断电,我猜你们一定不会喜欢听到这电容爆炸的声音的。
因为只能用直流稳压电压,所以电磁炮只能用学生电源供电,这点要注意一点,电源要选择并联,不然电流供不上。
3 其他
程序比较简单,图像处理用的简单查找色块算法。测试就负责接收模块的数据就好了。
openmv和激光测距都放在第一级舵机盘上,只有偏航角,激光测距我们架到跟标志物差不多高。
对了,大家可以在炮管上装一个激光笔,方便调试。
题目
1 电磁炮制作
不管得分点是什么,电磁炮是一定要做的。不过我们取了巧,直接在网上买了个成品套件。如图,图片来自淘宝,侵删。
原理还是比较简单,升压给电容充电,电容通过线圈产生磁场,磁场吸引钢珠。但是东西回来后,我们做了一些改动。
1.1 线圈制作
因为商家配的管子内径没有10mm(题目要求10mm-15mm)所以我们得重新绕。管子用的塑料管,
我们经过简单的讨论决定采用10mm内径的,然后弹丸也用10mm钢珠,因为第一感觉就是越小越好,越小所需能量越少。事实证明有时候第一感觉不一定是最优的。这个后面再谈
线圈参数
,我们决定绕8层,每层30匝,一共240匝,后经大神指点,这个匝数在合理范围内。大家绕的话,200-300都是可以的。匝数大了的话,电阻也会大,效果不一定更好。
漆包线直径
我们选的1mm,也有同学用0.8mm,事实证明都能用。
漆包线如果不好固定的话,可以上502胶水,至于两边,大家可以试试电工胶,或者3M胶布叠起来,或其他能卡住的东西都行。我们最后是用雕刻机雕的件卡的。
1.2 主控及模块
主控
我们自己画了一个STM32F407核心板。没有的同学完全可以用网上买的核心板。
视觉
毫无疑问的我们买了OPENMV,比赛的时候我们用的长焦镜头
测距
这个用的激光测距模块,有点小贵。群里有人用超声波模块,可以试试,可能效果不太好
键盘
这个一般人都用的矩阵键盘,但是我们买了串口屏 ,如图。串口屏的好处是,简单易上手,不用写矩阵键盘的行列扫描程序。用矩阵键盘的话大家一定要多买几个,容易坏。
事实上,普通的两个舵机的也能用,因为我们基本上都选择了只把炮口放最后一级舵机上。所以重量不是很大,它对系统的要求是,射的时候要稳,毕竟有一些小小的冲击力,会让精度下降。
不过由于我们学校比较有钱,所以我们组最后选择了用两个42步进伺服电机做动力,优点是力矩大,缺点是得有起始点的卡位,而舵机的脉冲宽和角度直接对应。
顺带说一句,图里的餐桌转盘轴承的确好用。
2 测试调试加填坑
第一坑 弹丸选择
关于弹丸材料和形状,我们直接选择了钢珠。也许有人会用钢柱或者子弹形状的?
淘宝上有一些钢珠材料不一样,线圈对其没有吸引力。这种钢珠看起来亮一些,不那么容易生锈。大家买的时候不要买错了~~
然后钢珠的直径,我们一开始选择了和管子内径一样的10mm。后面经过实验,发现钢珠直径小一些的话,精度更好。所以我们后面选择6mm,至于为什么不用8mm的,因为8mm买的假货,吸不动……我的猜测是:钢珠大了,跟管内的摩擦会多一些,所以精度受了影响
第二坑 弹丸初始位置
弹丸在线圈的起始位置,到底放在哪比较好呢?
经过试错,我们发现,钢珠一半进线圈在相同条件能打的最远。
当位置选好后,大家一定要把限位的东西固定死。不然会影响后面的曲线拟合
第三坑 发射模式选择与adc采电压
发射模式,目前有两种选择。一是定角度变电压。一是定电压变角度。
从实验数据来看,两种都能用
最后一张为距离与角度的数据拟合,可以看出,在20°左右近似线性。事实上,我们选择了10°–30°的区间。
没错,我们大部分人都用的定电压变角度模式。用另外一个模式做的同学做的也不错。看大家选择了。
这两种模式,都非常依赖一个东西:对电压的准确和及时的测量。我们做的时候,ad采样数据的波形噪声很大,最严重的时候,同一个条件下,它有三个落点(心塞)。解决办法有,一是adc的电源做稳,ad软件平均滤波的个数多一点。 我们的做法是,不用adc,用比较器,比较器一端接电容分的压,另一端用滑动变阻器设置阈值电压(设置好之后就不用变了),比较器的输出接电磁阀,电磁阀做控制开关。完美避过ad采样的坑。
曲线拟合
从理论上讲,距离和角度的函数关系是隐函数。我们尝试求解过,后来发现还是拟合大法好。
我们选择的角度在10–30°,首先选择一个电压能打两米到三米。其次,测试每加一度,距离的变化,每一个角度至少实验10次,取平均值。最后用matlab拟合。
这一步非常有趣,因为我们机械和硬件都做得很稳,问题不多。有同学说他们的精度太差,不好做。有同学说他们晚上拟合的数据和早上拟合的数据差很多……(听着都心塞),测试的时候,一定要盯住电磁炮,一有不对立马断电,我猜你们一定不会喜欢听到这电容爆炸的声音的。
因为只能用直流稳压电压,所以电磁炮只能用学生电源供电,这点要注意一点,电源要选择并联,不然电流供不上。
3 其他
程序比较简单,图像处理用的简单查找色块算法。测试就负责接收模块的数据就好了。
openmv和激光测距都放在第一级舵机盘上,只有偏航角,激光测距我们架到跟标志物差不多高。
对了,大家可以在炮管上装一个激光笔,方便调试。
举报
更多回帖
rotate(-90deg);
回复
相关问答
STM32F407
核心板
线圈
如何利用单片机设计
一种
模拟
电磁
曲射炮
?
2021-11-11
743
请问怎样
去
设计
一种
基于
STM32F407
的直流无刷电机?
2021-07-21
1815
怎样
去
设计
一种
基于
STM32F407
的直流无刷电机BLDC控制硬件电路?
2021-07-20
1140
怎样
去
新建
一种
基于ST官方固件库的
STM32F407
工程
呢
2021-10-25
852
如何
去
制作
一
个基于stc15
f
2k60s2的
核心板
呢
2022-01-25
744
如何
去
识别
STM32F
401CCU6 /
STM32F
411CEU6
核心板
的真假
呢
2021-10-15
2425
怎样
去
设计
一种
基于
STM32F407
主控的滚球控制系统
呢
2021-12-23
1984
如何使用
STM32
核心板
进行电路设计与
制作
2021-10-13
1304
如何对
STM32F407
ZG
核心板
进行开发
2021-10-20
1217
怎样
去
设计
一种
基于
STM32F407
的万能红外遥控器
2021-10-18
1663
发帖
登录/注册
20万+
工程师都在用,
免费
PCB检查工具
无需安装、支持浏览器和手机在线查看、实时共享
查看
点击登录
登录更多精彩功能!
首页
论坛版块
小组
免费开发板试用
ebook
直播
搜索
登录
×
20
完善资料,
赚取积分









 举报
举报



