STM32F4 PS2手柄移植HAL库,利用Cube进行设置
请按以下步骤进行
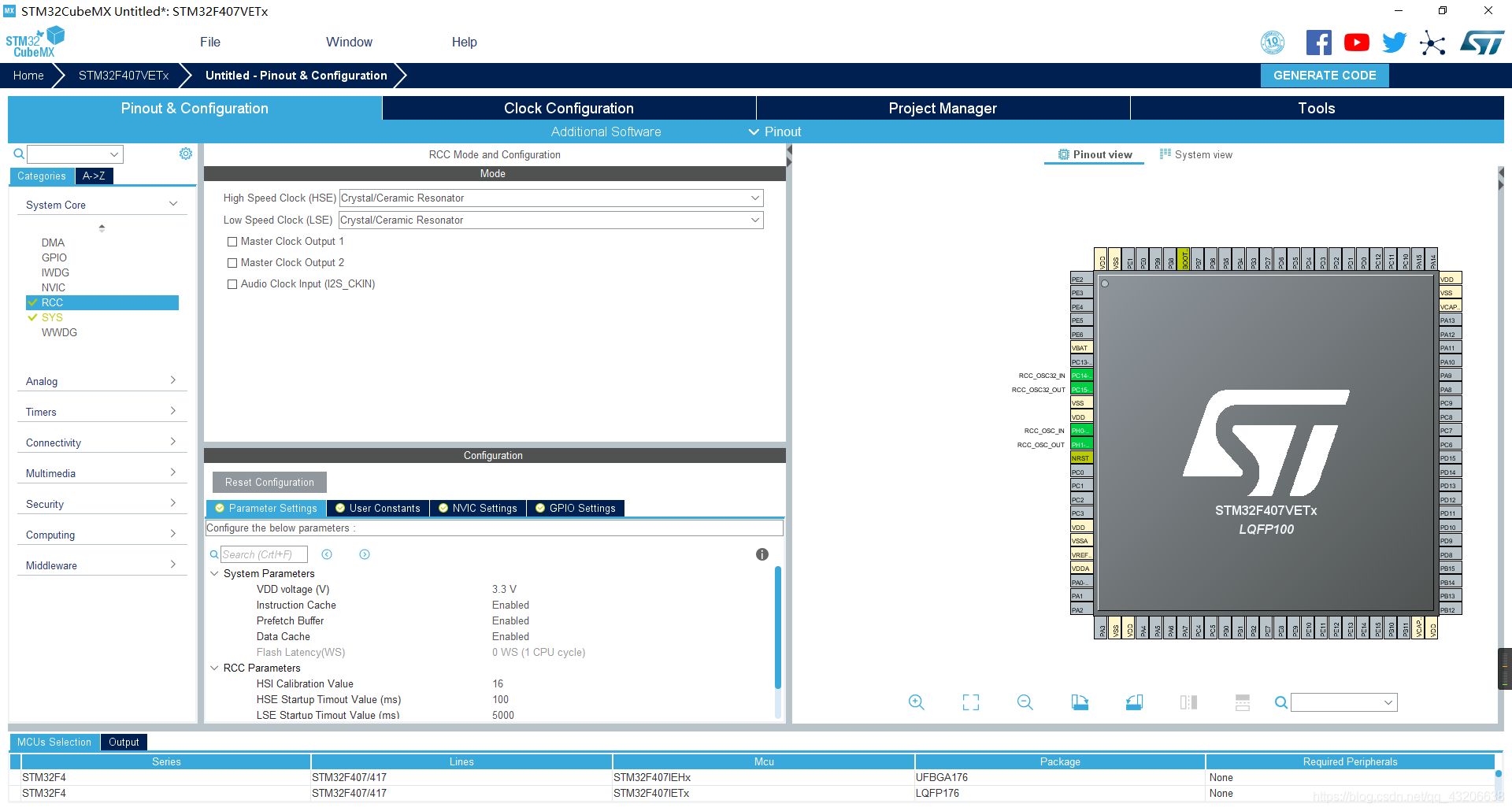
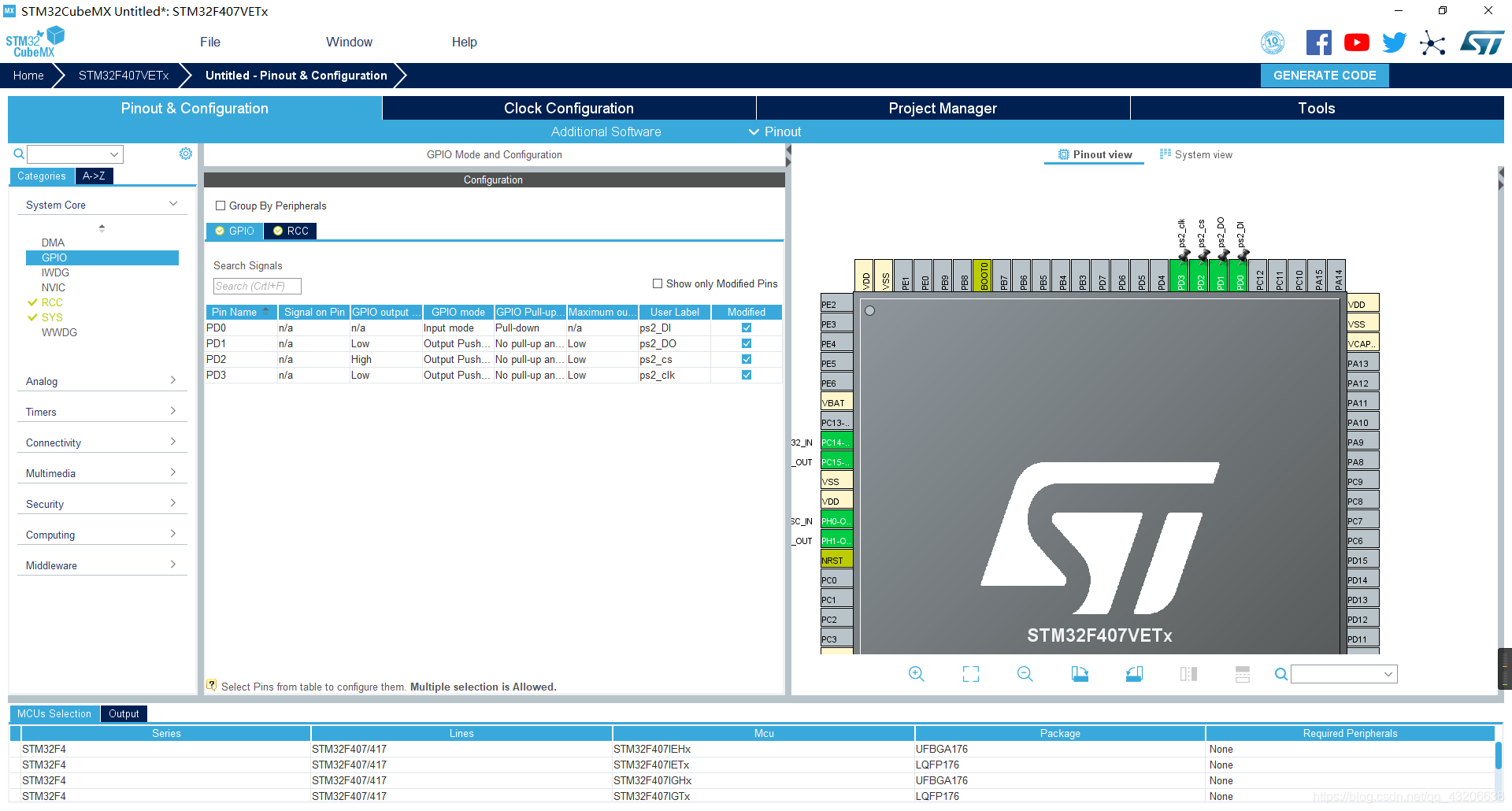
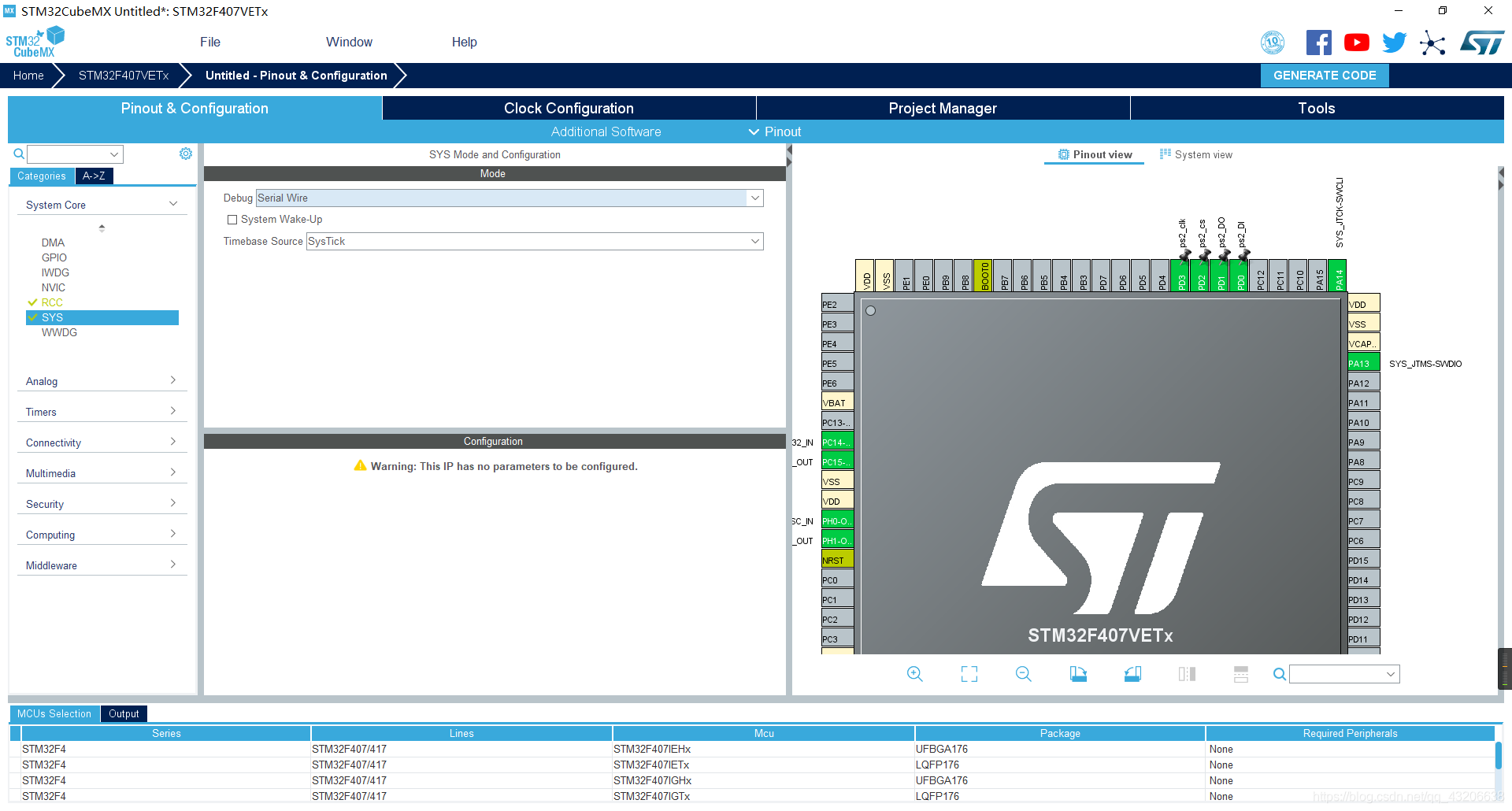 配置GPIO
D0 input
D1 output
D2 output
D3 output
详见下图
配置GPIO
D0 input
D1 output
D2 output
D3 output
详见下图
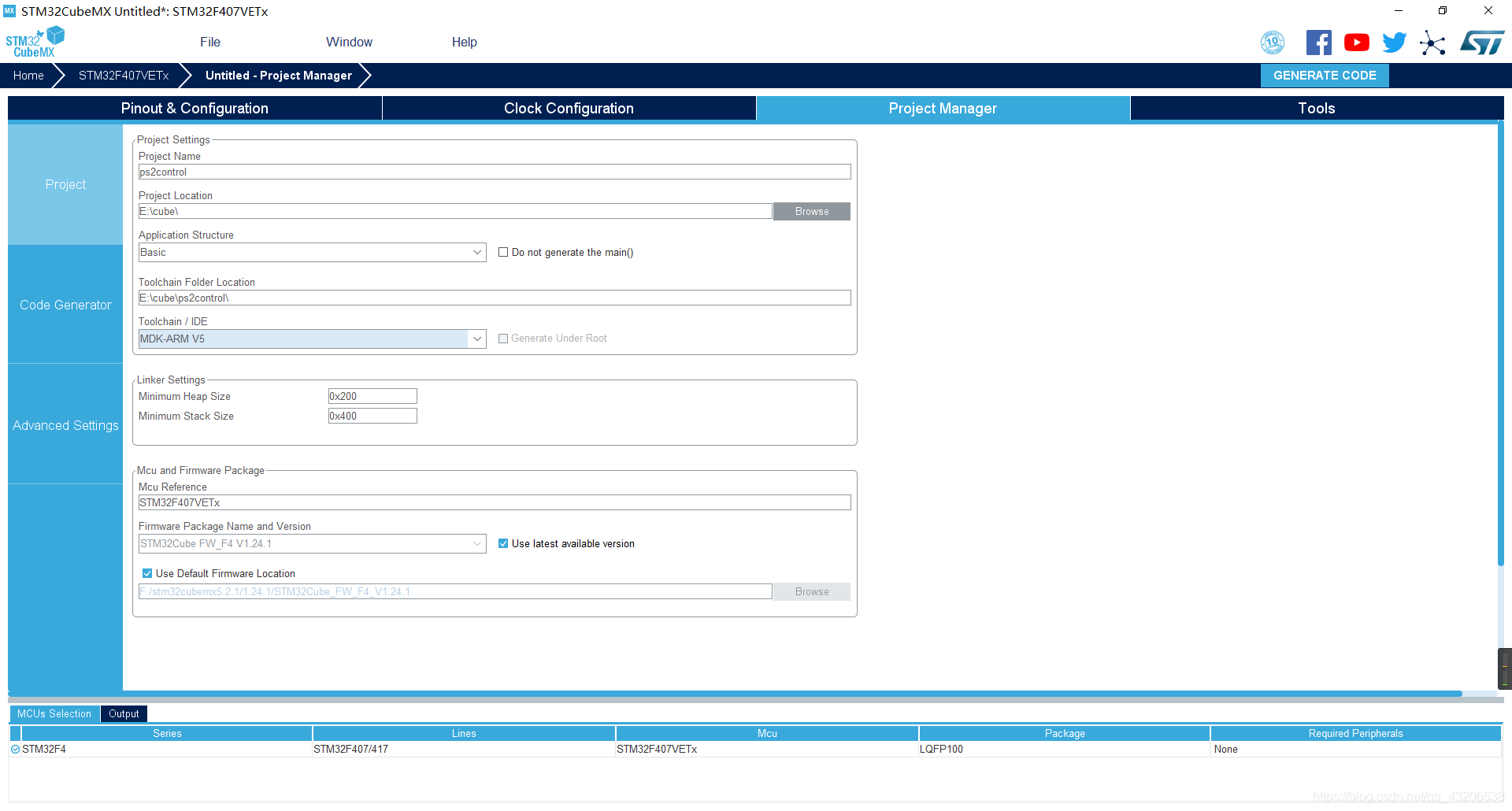
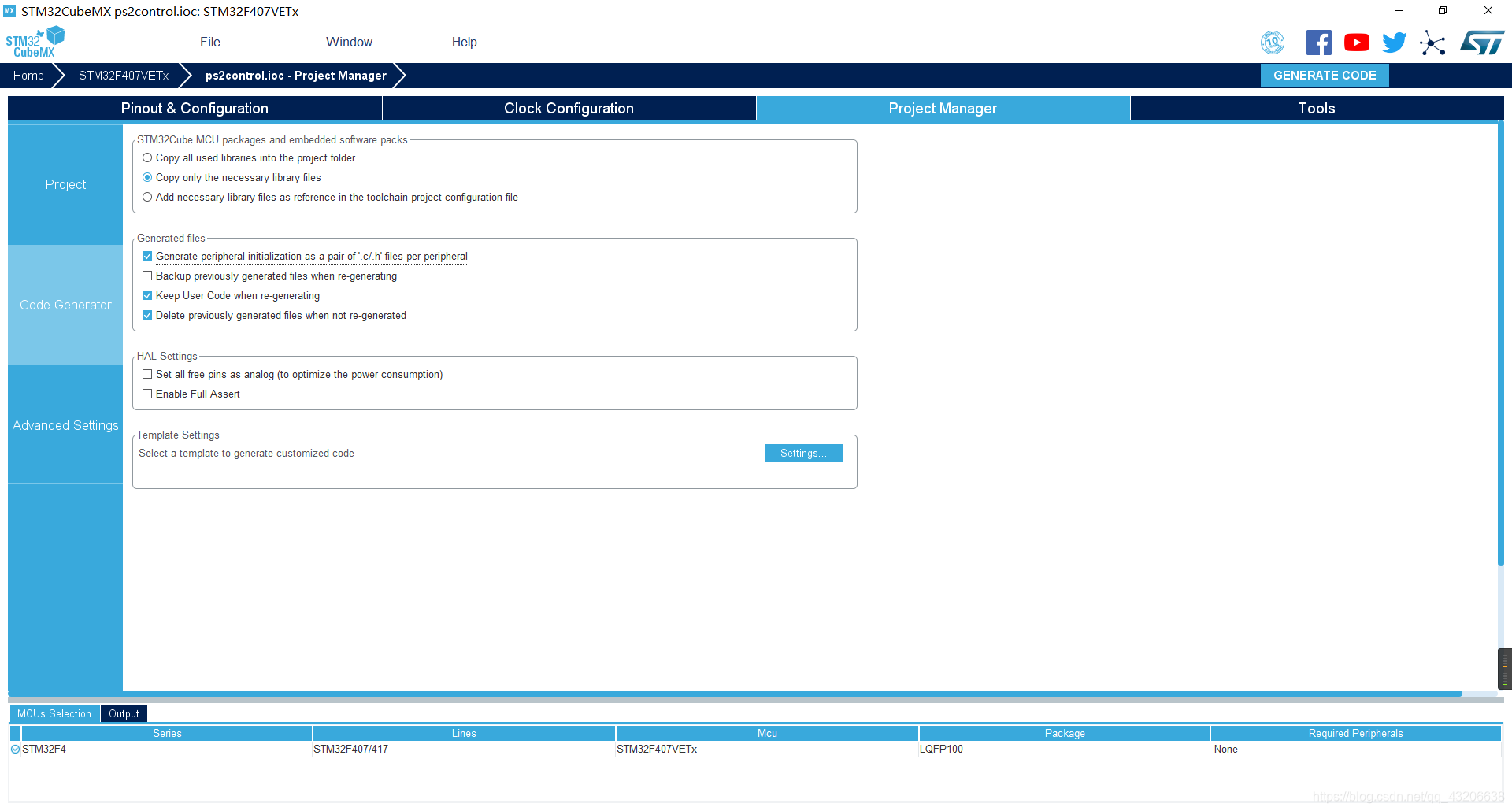
 然后配置工程文件生成格式
然后配置工程文件生成格式
 生成MDK文件并用keil打开
下载下面链接的文件并开始移植
将文件内的delay.c sys.c ps2.c misc.c 进行移植
移植过程如下:
1.将delay.c sys.c ps2.c misc.c 四个文件放置在cube生成的MDK-ARM文件夹内; 2…将delay.h sys.h ps2.h misc.h 四个文件放置在cube生成的Inc文件夹
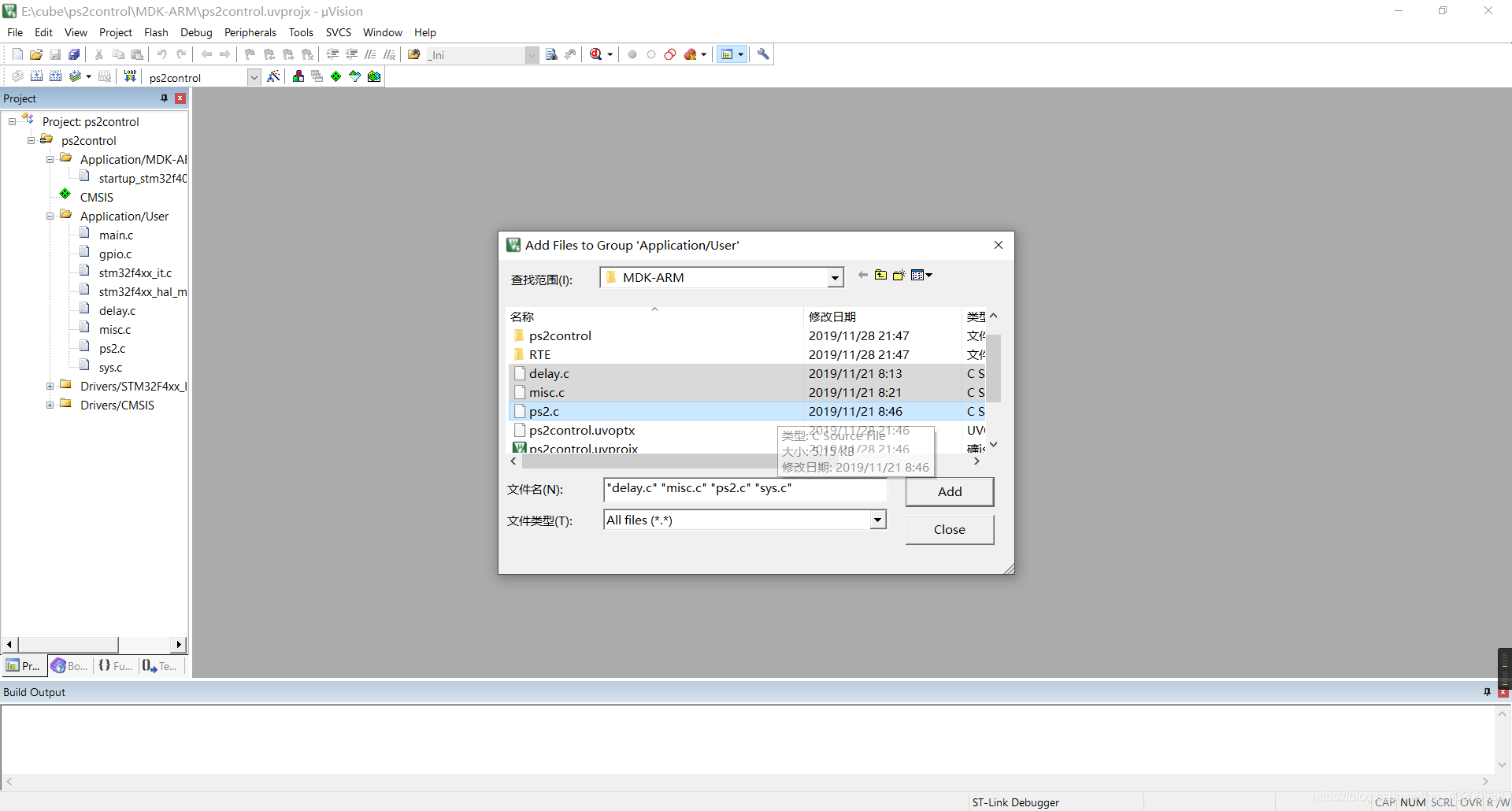
3. 在keil里面填入这几个.c文件
生成MDK文件并用keil打开
下载下面链接的文件并开始移植
将文件内的delay.c sys.c ps2.c misc.c 进行移植
移植过程如下:
1.将delay.c sys.c ps2.c misc.c 四个文件放置在cube生成的MDK-ARM文件夹内; 2…将delay.h sys.h ps2.h misc.h 四个文件放置在cube生成的Inc文件夹
3. 在keil里面填入这几个.c文件
 4.编译即可通过
4.编译即可通过
 code:
code:
// ps2.c
#include "stm32f4xx_hal.h"
#include "misc.h"
#include "ps2.h"
#include "gpio.h"
#define DELAY_TIME delay_us(5);
volatile int PS2_LX,PS2_LY,PS2_RX,PS2_RY,PS2_KEY; //
uint16_t Handkey;
uint8_t Comd[2]={0x01,0x42}; //开始命令。请求数据
uint8_t Data[9]={0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00};//数据存储数组
uint16_t MASK[]={
PSB_SELECT,
PSB_L3,
PSB_R3 ,
PSB_START,
PSB_PAD_UP,
PSB_PAD_RIGHT,
PSB_PAD_DOWN,
PSB_PAD_LEFT,
PSB_L2,
PSB_R2,
PSB_L1,
PSB_R1 ,
PSB_GREEN,
PSB_RED,
PSB_BLUE,
PSB_PINK
}; //按键值与按键明
//向手柄发送命令
void PS2_Cmd(uint8_t CMD)
{
volatile uint16_t ref=0x01;
Data[1] = 0;
for(ref=0x01;ref<0x0100;ref<<=1)
{
if(ref&CMD)
{
DO_H; //输出一位控制位
}
else DO_L;
CLK_H; //时钟拉高
DELAY_TIME;
CLK_L;
DELAY_TIME;
CLK_H;
if(DI)
Data[1] = ref|Data[1];
}
delay_us(16);
}
//判断是否为红灯模式 0x41=模拟绿灯 0x73=模拟红灯
//返回值;0,红灯模式
// 其他,其他模式
uint8_t PS2_RedLight(void)
{
CS_L;
PS2_Cmd(Comd[0]); //开始命令
PS2_Cmd(Comd[1]); //请求数据
CS_H;
if( Data[1] == 0X73) return 0 ;
else return 1;
}
//读取手柄数据
void PS2_ReadData(void)
{
volatile uint8_t byte=0;
volatile uint16_t ref=0x01;
CS_L;
PS2_Cmd(Comd[0]); //开始命令
PS2_Cmd(Comd[1]); //请求数据
for(byte=2;byte<9;byte++) //开始接受数据
{
for(ref=0x01;ref<0x100;ref<<=1)
{
CLK_H;
DELAY_TIME;
CLK_L;
DELAY_TIME;
CLK_H;
if(DI)
Data[byte] = ref|Data[byte];
}
delay_us(16);
}
CS_H;
}
//对读出来的PS2的数据进行处理 只处理了按键部分 默认数据是红灯模式 只有一个按键按下时
//按下为0, 未按下为1
uint8_t PS2_DataKey()
{
uint8_t index;
PS2_ClearData();
PS2_ReadData();
Handkey=(Data[4]<<8)|Data[3]; //这是16个按键 按下为0, 未按下为1
for(index=0;index<16;index++)
{
if((Handkey&(1<<(MASK[index]-1)))==0)
return index+1;
}
return 0; //没有任何按键按下
}
//得到一个摇杆的模拟量 范围0~256
uint8_t PS2_AnologData(uint8_t button)
{
return Data[button];
}
//清除数据缓冲区
void PS2_ClearData()
{
uint8_t a;
for(a=0;a<9;a++)
Data[a]=0x00;
}
//void delay_init(uint8_t SYSCLK)
//{
// SysTick->CTRL&=0xfffffffb;//bit2清空,选择外部时钟 HCLK/8
// fac_us=SYSCLK/8;
//}
//void delay_us(uint32_t nus)
//{
// uint32_t temp;
// SysTick->LOAD=nus*fac_us; //时间加载
// SysTick->VAL=0x00; //清空计数器
// SysTick->CTRL=0x01 ; //开始倒数
// do
// {
// temp=SysTick->CTRL;
// }
// while(temp&0x01&&!(temp&(1<<16)));//等待时间到达
// SysTick->CTRL=0x00; //关闭计数器
// SysTick->VAL =0X00; //清空计数器
//}
//short poll
void PS2_ShortPoll(void)
{
CS_L;
delay_us(16);
PS2_Cmd(0x01);
PS2_Cmd(0x42);
PS2_Cmd(0X00);
PS2_Cmd(0x00);
PS2_Cmd(0x00);
CS_H;
delay_us(16);
}
//进入设置
void PS2_EnterConfing(void)
{
CS_L;
delay_us(16);
PS2_Cmd(0x01);
PS2_Cmd(0x43);
PS2_Cmd(0X00);
PS2_Cmd(0x01);
PS2_Cmd(0x00);
PS2_Cmd(0X00);
PS2_Cmd(0X00);
PS2_Cmd(0X00);
PS2_Cmd(0X00);
CS_H;
delay_us(16);
}
//发送模式设置
void PS2_TurnOnAnalogMode(void)
{
CS_L;
PS2_Cmd(0x01);
PS2_Cmd(0x44);
PS2_Cmd(0X00);
PS2_Cmd(0x01); //analog=0x01;digital=0x00 软件设置发送模式
PS2_Cmd(0x03); //Ox03锁存设置,即不可通过按键“MODE”设置模式。
//0xEE不锁存软件设置,可通过按键“MODE”设置模式。
PS2_Cmd(0X00);
PS2_Cmd(0X00);
PS2_Cmd(0X00);
PS2_Cmd(0X00);
CS_H;
delay_us(16);
}
//振动设置
void PS2_VibrationMode(void)
{
CS_L;
delay_us(16);
PS2_Cmd(0x01);
PS2_Cmd(0x4D);
PS2_Cmd(0X00);
PS2_Cmd(0x00);
PS2_Cmd(0X01);
CS_H;
delay_us(16);
}
//完成并保存配置
void PS2_ExitConfing(void)
{
CS_L;
delay_us(16);
PS2_Cmd(0x01);
PS2_Cmd(0x43);
PS2_Cmd(0X00);
PS2_Cmd(0x00);
PS2_Cmd(0x5A);
PS2_Cmd(0x5A);
PS2_Cmd(0x5A);
PS2_Cmd(0x5A);
PS2_Cmd(0x5A);
CS_H;
delay_us(16);
}
//手柄配置初始化
void PS2_SetInit(void)
{
PS2_ShortPoll();
PS2_ShortPoll();
PS2_ShortPoll();
PS2_EnterConfing(); //进入配置模式
PS2_TurnOnAnalogMode(); //“红绿灯”配置模式,并选择是否保存
//PS2_VibrationMode(); //开启震动模式
PS2_ExitConfing(); //完成并保存配置
}
/******************************************************
Function: void PS2_Vibration(u8 motor1, u8 motor2)
Description: 手柄震动函数,
Calls: void PS2_Cmd(u8 CMD);
Input: motor1:右侧小震动电机 0x00关,其他开
motor2:左侧大震动电机 0x40~0xFF 电机开,值越大 震动越大
******************************************************/
void PS2_Vibration(uint8_t motor1, uint8_t motor2)
{
CS_L;
delay_us(16);
PS2_Cmd(0x01); //开始命令
PS2_Cmd(0x42); //请求数据
PS2_Cmd(0X00);
PS2_Cmd(motor1);
PS2_Cmd(motor2);
PS2_Cmd(0X00);
PS2_Cmd(0X00);
PS2_Cmd(0X00);
PS2_Cmd(0X00);
CS_H;
delay_us(16);
}
//读取手柄信息
void PS2_Receive (void)
{
PS2_LX=PS2_AnologData(PSS_LX);
PS2_LY=PS2_AnologData(PSS_LY);
PS2_RX=PS2_AnologData(PSS_RX);
PS2_RY=PS2_AnologData(PSS_RY);
PS2_KEY=PS2_DataKey();
}
// ps2.h
#ifndef __PS2_H__
#define __PS2_H__
#include "stm32f4xx_hal.h"
#include "sys.h"
#define DI PDin(0)
#define DO_H PDout(1)=1
#define DO_L PDout(1)=0
#define CS_H PDout(2)=1
#define CS_L PDout(2)=0
#define CLK_H PDout(3)=1
#define CLK_L PDout(3)=0
//These are our button constants
#define PSB_SELECT 1
#define PSB_L3 2
#define PSB_R3 3
#define PSB_START 4
#define PSB_PAD_UP 5
#define PSB_PAD_RIGHT 6
#define PSB_PAD_DOWN 7
#define PSB_PAD_LEFT 8
#define PSB_L2 9
#define PSB_R2 10
#define PSB_L1 11
#define PSB_R1 12
#define PSB_GREEN 13
#define PSB_RED 14
#define PSB_BLUE 15
#define PSB_PINK 16
#define PSB_TRIANGLE 13
#define PSB_CIRCLE 14
#define PSB_CROSS 15
#define PSB_SQUARE 26
//These are stick values
#define PSS_RX 5 //右摇杆X轴数据
#define PSS_RY 6
#define PSS_LX 7
#define PSS_LY 8
extern uint8_t Data[9];
extern uint16_t MASK[16];
extern uint16_t Handkey;
void PS2_Init(void);
uint8_t PS2_RedLight(void);//判断是否为红灯模式
void PS2_ReadData(void);
void PS2_Cmd(uint8_t CMD); //
uint8_t PS2_DataKey(void); //键值读取
uint8_t PS2_AnologData(uint8_t button); //得到一个摇杆的模拟量
void PS2_ClearData(void); //清除数据缓冲区
void delay_init(uint8_t SYSCLK);
void delay_us(uint32_t nus);
void PS2_ShortPoll(void);//short poll
void PS2_EnterConfing(void);//进入设置
void PS2_TurnOnAnalogMode(void);//保存并完成设置
void PS2_VibrationMode(void);
void PS2_ExitConfing(void);//保存并完成设置
void PS2_SetInit(void);//手柄设置初始化
void PS2_Vibration(uint8_t motor1 ,uint8_t motor2);
#endif
;
// sys.c
#include "sys.h"
//
//********************************************************************************
//修改说明
//无
//
//THUMB指令不支持汇编内联
//采用如下方法实现执行汇编指令WFI
__asm void WFI_SET(void)
{
WFI;
}
//关闭所有中断(但是不包括fault和NMI中断)
__asm void INTX_DISABLE(void)
{
CPSID I
BX LR
}
//开启所有中断
__asm void INTX_ENABLE(void)
{
CPSIE I
BX LR
}
//设置栈顶地址
//addr:栈顶地址
__asm void MSR_MSP(uint32_t addr)
{
MSR MSP, r0 //set Main Stack value
BX r14
}
// ps2.h
#ifndef __SYS_H
#define __SYS_H
#include "stm32f4xx.h"
#include "delay.h"
#include "ps2.h"
#define SYSTEM_SUPPORT_OS 0 //定义系统文件夹是否支持UCOS
extern volatile int PS2_LX,PS2_LY,PS2_RX,PS2_RY,PS2_KEY;
//位带操作,实现51类似的GPIO控制功能
//具体实现思想,参考<
>第五章(87页~92页).M4同M3类似,只是寄存器地址变了.
//IO口操作宏定义
#define BITBAND(addr, bitnum) ((addr & 0xF0000000)+0x2000000+((addr &0xFFFFF)<<5)+(bitnum<<2))
#define MEM_ADDR(addr) *((volatile unsigned long *)(addr))
#define BIT_ADDR(addr, bitnum) MEM_ADDR(BITBAND(addr, bitnum))
//IO口地址映射
#define GPIOA_ODR_Addr (GPIOA_BASE+20) //0x40020014
#define GPIOB_ODR_Addr (GPIOB_BASE+20) //0x40020414
#define GPIOC_ODR_Addr (GPIOC_BASE+20) //0x40020814
#define GPIOD_ODR_Addr (GPIOD_BASE+20) //0x40020C14
#define GPIOE_ODR_Addr (GPIOE_BASE+20) //0x40021014
#define GPIOF_ODR_Addr (GPIOF_BASE+20) //0x40021414
#define GPIOG_ODR_Addr (GPIOG_BASE+20) //0x40021814
#define GPIOH_ODR_Addr (GPIOH_BASE+20) //0x40021C14
#define GPIOI_ODR_Addr (GPIOI_BASE+20) //0x40022014
#define GPIOA_IDR_Addr (GPIOA_BASE+16) //0x40020010
#define GPIOB_IDR_Addr (GPIOB_BASE+16) //0x40020410
#define GPIOC_IDR_Addr (GPIOC_BASE+16) //0x40020810
#define GPIOD_IDR_Addr (GPIOD_BASE+16) //0x40020C10
#define GPIOE_IDR_Addr (GPIOE_BASE+16) //0x40021010
#define GPIOF_IDR_Addr (GPIOF_BASE+16) //0x40021410
#define GPIOG_IDR_Addr (GPIOG_BASE+16) //0x40021810
#define GPIOH_IDR_Addr (GPIOH_BASE+16) //0x40021C10
#define GPIOI_IDR_Addr (GPIOI_BASE+16) //0x40022010
拉姆轮的底盘代码
STM32F4 PS2手柄移植HAL库,利用Cube进行设置
请按以下步骤进行
配置GPIO
D0 input
D1 output
D2 output
D3 output
详见下图
然后配置工程文件生成格式
生成MDK文件并用keil打开
下载下面链接的文件并开始移植
将文件内的delay.c sys.c ps2.c misc.c 进行移植
移植过程如下:
1.将delay.c sys.c ps2.c misc.c 四个文件放置在cube生成的MDK-ARM文件夹内; 2…将delay.h sys.h ps2.h misc.h 四个文件放置在cube生成的Inc文件夹
3. 在keil里面填入这几个.c文件
4.编译即可通过
code:
// ps2.c
#include "stm32f4xx_hal.h"
#include "misc.h"
#include "ps2.h"
#include "gpio.h"
#define DELAY_TIME delay_us(5);
volatile int PS2_LX,PS2_LY,PS2_RX,PS2_RY,PS2_KEY; //
uint16_t Handkey;
uint8_t Comd[2]={0x01,0x42}; //开始命令。请求数据
uint8_t Data[9]={0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00};//数据存储数组
uint16_t MASK[]={
PSB_SELECT,
PSB_L3,
PSB_R3 ,
PSB_START,
PSB_PAD_UP,
PSB_PAD_RIGHT,
PSB_PAD_DOWN,
PSB_PAD_LEFT,
PSB_L2,
PSB_R2,
PSB_L1,
PSB_R1 ,
PSB_GREEN,
PSB_RED,
PSB_BLUE,
PSB_PINK
}; //按键值与按键明
//向手柄发送命令
void PS2_Cmd(uint8_t CMD)
{
volatile uint16_t ref=0x01;
Data[1] = 0;
for(ref=0x01;ref<0x0100;ref<<=1)
{
if(ref&CMD)
{
DO_H; //输出一位控制位
}
else DO_L;
CLK_H; //时钟拉高
DELAY_TIME;
CLK_L;
DELAY_TIME;
CLK_H;
if(DI)
Data[1] = ref|Data[1];
}
delay_us(16);
}
//判断是否为红灯模式 0x41=模拟绿灯 0x73=模拟红灯
//返回值;0,红灯模式
// 其他,其他模式
uint8_t PS2_RedLight(void)
{
CS_L;
PS2_Cmd(Comd[0]); //开始命令
PS2_Cmd(Comd[1]); //请求数据
CS_H;
if( Data[1] == 0X73) return 0 ;
else return 1;
}
//读取手柄数据
void PS2_ReadData(void)
{
volatile uint8_t byte=0;
volatile uint16_t ref=0x01;
CS_L;
PS2_Cmd(Comd[0]); //开始命令
PS2_Cmd(Comd[1]); //请求数据
for(byte=2;byte<9;byte++) //开始接受数据
{
for(ref=0x01;ref<0x100;ref<<=1)
{
CLK_H;
DELAY_TIME;
CLK_L;
DELAY_TIME;
CLK_H;
if(DI)
Data[byte] = ref|Data[byte];
}
delay_us(16);
}
CS_H;
}
//对读出来的PS2的数据进行处理 只处理了按键部分 默认数据是红灯模式 只有一个按键按下时
//按下为0, 未按下为1
uint8_t PS2_DataKey()
{
uint8_t index;
PS2_ClearData();
PS2_ReadData();
Handkey=(Data[4]<<8)|Data[3]; //这是16个按键 按下为0, 未按下为1
for(index=0;index<16;index++)
{
if((Handkey&(1<<(MASK[index]-1)))==0)
return index+1;
}
return 0; //没有任何按键按下
}
//得到一个摇杆的模拟量 范围0~256
uint8_t PS2_AnologData(uint8_t button)
{
return Data[button];
}
//清除数据缓冲区
void PS2_ClearData()
{
uint8_t a;
for(a=0;a<9;a++)
Data[a]=0x00;
}
//void delay_init(uint8_t SYSCLK)
//{
// SysTick->CTRL&=0xfffffffb;//bit2清空,选择外部时钟 HCLK/8
// fac_us=SYSCLK/8;
//}
//void delay_us(uint32_t nus)
//{
// uint32_t temp;
// SysTick->LOAD=nus*fac_us; //时间加载
// SysTick->VAL=0x00; //清空计数器
// SysTick->CTRL=0x01 ; //开始倒数
// do
// {
// temp=SysTick->CTRL;
// }
// while(temp&0x01&&!(temp&(1<<16)));//等待时间到达
// SysTick->CTRL=0x00; //关闭计数器
// SysTick->VAL =0X00; //清空计数器
//}
//short poll
void PS2_ShortPoll(void)
{
CS_L;
delay_us(16);
PS2_Cmd(0x01);
PS2_Cmd(0x42);
PS2_Cmd(0X00);
PS2_Cmd(0x00);
PS2_Cmd(0x00);
CS_H;
delay_us(16);
}
//进入设置
void PS2_EnterConfing(void)
{
CS_L;
delay_us(16);
PS2_Cmd(0x01);
PS2_Cmd(0x43);
PS2_Cmd(0X00);
PS2_Cmd(0x01);
PS2_Cmd(0x00);
PS2_Cmd(0X00);
PS2_Cmd(0X00);
PS2_Cmd(0X00);
PS2_Cmd(0X00);
CS_H;
delay_us(16);
}
//发送模式设置
void PS2_TurnOnAnalogMode(void)
{
CS_L;
PS2_Cmd(0x01);
PS2_Cmd(0x44);
PS2_Cmd(0X00);
PS2_Cmd(0x01); //analog=0x01;digital=0x00 软件设置发送模式
PS2_Cmd(0x03); //Ox03锁存设置,即不可通过按键“MODE”设置模式。
//0xEE不锁存软件设置,可通过按键“MODE”设置模式。
PS2_Cmd(0X00);
PS2_Cmd(0X00);
PS2_Cmd(0X00);
PS2_Cmd(0X00);
CS_H;
delay_us(16);
}
//振动设置
void PS2_VibrationMode(void)
{
CS_L;
delay_us(16);
PS2_Cmd(0x01);
PS2_Cmd(0x4D);
PS2_Cmd(0X00);
PS2_Cmd(0x00);
PS2_Cmd(0X01);
CS_H;
delay_us(16);
}
//完成并保存配置
void PS2_ExitConfing(void)
{
CS_L;
delay_us(16);
PS2_Cmd(0x01);
PS2_Cmd(0x43);
PS2_Cmd(0X00);
PS2_Cmd(0x00);
PS2_Cmd(0x5A);
PS2_Cmd(0x5A);
PS2_Cmd(0x5A);
PS2_Cmd(0x5A);
PS2_Cmd(0x5A);
CS_H;
delay_us(16);
}
//手柄配置初始化
void PS2_SetInit(void)
{
PS2_ShortPoll();
PS2_ShortPoll();
PS2_ShortPoll();
PS2_EnterConfing(); //进入配置模式
PS2_TurnOnAnalogMode(); //“红绿灯”配置模式,并选择是否保存
//PS2_VibrationMode(); //开启震动模式
PS2_ExitConfing(); //完成并保存配置
}
/******************************************************
Function: void PS2_Vibration(u8 motor1, u8 motor2)
Description: 手柄震动函数,
Calls: void PS2_Cmd(u8 CMD);
Input: motor1:右侧小震动电机 0x00关,其他开
motor2:左侧大震动电机 0x40~0xFF 电机开,值越大 震动越大
******************************************************/
void PS2_Vibration(uint8_t motor1, uint8_t motor2)
{
CS_L;
delay_us(16);
PS2_Cmd(0x01); //开始命令
PS2_Cmd(0x42); //请求数据
PS2_Cmd(0X00);
PS2_Cmd(motor1);
PS2_Cmd(motor2);
PS2_Cmd(0X00);
PS2_Cmd(0X00);
PS2_Cmd(0X00);
PS2_Cmd(0X00);
CS_H;
delay_us(16);
}
//读取手柄信息
void PS2_Receive (void)
{
PS2_LX=PS2_AnologData(PSS_LX);
PS2_LY=PS2_AnologData(PSS_LY);
PS2_RX=PS2_AnologData(PSS_RX);
PS2_RY=PS2_AnologData(PSS_RY);
PS2_KEY=PS2_DataKey();
}
// ps2.h
#ifndef __PS2_H__
#define __PS2_H__
#include "stm32f4xx_hal.h"
#include "sys.h"
#define DI PDin(0)
#define DO_H PDout(1)=1
#define DO_L PDout(1)=0
#define CS_H PDout(2)=1
#define CS_L PDout(2)=0
#define CLK_H PDout(3)=1
#define CLK_L PDout(3)=0
//These are our button constants
#define PSB_SELECT 1
#define PSB_L3 2
#define PSB_R3 3
#define PSB_START 4
#define PSB_PAD_UP 5
#define PSB_PAD_RIGHT 6
#define PSB_PAD_DOWN 7
#define PSB_PAD_LEFT 8
#define PSB_L2 9
#define PSB_R2 10
#define PSB_L1 11
#define PSB_R1 12
#define PSB_GREEN 13
#define PSB_RED 14
#define PSB_BLUE 15
#define PSB_PINK 16
#define PSB_TRIANGLE 13
#define PSB_CIRCLE 14
#define PSB_CROSS 15
#define PSB_SQUARE 26
//These are stick values
#define PSS_RX 5 //右摇杆X轴数据
#define PSS_RY 6
#define PSS_LX 7
#define PSS_LY 8
extern uint8_t Data[9];
extern uint16_t MASK[16];
extern uint16_t Handkey;
void PS2_Init(void);
uint8_t PS2_RedLight(void);//判断是否为红灯模式
void PS2_ReadData(void);
void PS2_Cmd(uint8_t CMD); //
uint8_t PS2_DataKey(void); //键值读取
uint8_t PS2_AnologData(uint8_t button); //得到一个摇杆的模拟量
void PS2_ClearData(void); //清除数据缓冲区
void delay_init(uint8_t SYSCLK);
void delay_us(uint32_t nus);
void PS2_ShortPoll(void);//short poll
void PS2_EnterConfing(void);//进入设置
void PS2_TurnOnAnalogMode(void);//保存并完成设置
void PS2_VibrationMode(void);
void PS2_ExitConfing(void);//保存并完成设置
void PS2_SetInit(void);//手柄设置初始化
void PS2_Vibration(uint8_t motor1 ,uint8_t motor2);
#endif
;
// sys.c
#include "sys.h"
//
//********************************************************************************
//修改说明
//无
//
//THUMB指令不支持汇编内联
//采用如下方法实现执行汇编指令WFI
__asm void WFI_SET(void)
{
WFI;
}
//关闭所有中断(但是不包括fault和NMI中断)
__asm void INTX_DISABLE(void)
{
CPSID I
BX LR
}
//开启所有中断
__asm void INTX_ENABLE(void)
{
CPSIE I
BX LR
}
//设置栈顶地址
//addr:栈顶地址
__asm void MSR_MSP(uint32_t addr)
{
MSR MSP, r0 //set Main Stack value
BX r14
}
// ps2.h
#ifndef __SYS_H
#define __SYS_H
#include "stm32f4xx.h"
#include "delay.h"
#include "ps2.h"
#define SYSTEM_SUPPORT_OS 0 //定义系统文件夹是否支持UCOS
extern volatile int PS2_LX,PS2_LY,PS2_RX,PS2_RY,PS2_KEY;
//位带操作,实现51类似的GPIO控制功能
//具体实现思想,参考<
>第五章(87页~92页).M4同M3类似,只是寄存器地址变了.
//IO口操作宏定义
#define BITBAND(addr, bitnum) ((addr & 0xF0000000)+0x2000000+((addr &0xFFFFF)<<5)+(bitnum<<2))
#define MEM_ADDR(addr) *((volatile unsigned long *)(addr))
#define BIT_ADDR(addr, bitnum) MEM_ADDR(BITBAND(addr, bitnum))
//IO口地址映射
#define GPIOA_ODR_Addr (GPIOA_BASE+20) //0x40020014
#define GPIOB_ODR_Addr (GPIOB_BASE+20) //0x40020414
#define GPIOC_ODR_Addr (GPIOC_BASE+20) //0x40020814
#define GPIOD_ODR_Addr (GPIOD_BASE+20) //0x40020C14
#define GPIOE_ODR_Addr (GPIOE_BASE+20) //0x40021014
#define GPIOF_ODR_Addr (GPIOF_BASE+20) //0x40021414
#define GPIOG_ODR_Addr (GPIOG_BASE+20) //0x40021814
#define GPIOH_ODR_Addr (GPIOH_BASE+20) //0x40021C14
#define GPIOI_ODR_Addr (GPIOI_BASE+20) //0x40022014
#define GPIOA_IDR_Addr (GPIOA_BASE+16) //0x40020010
#define GPIOB_IDR_Addr (GPIOB_BASE+16) //0x40020410
#define GPIOC_IDR_Addr (GPIOC_BASE+16) //0x40020810
#define GPIOD_IDR_Addr (GPIOD_BASE+16) //0x40020C10
#define GPIOE_IDR_Addr (GPIOE_BASE+16) //0x40021010
#define GPIOF_IDR_Addr (GPIOF_BASE+16) //0x40021410
#define GPIOG_IDR_Addr (GPIOG_BASE+16) //0x40021810
#define GPIOH_IDR_Addr (GPIOH_BASE+16) //0x40021C10
#define GPIOI_IDR_Addr (GPIOI_BASE+16) //0x40022010
拉姆轮的底盘代码

 举报
举报




