黄工无刷电机学习
登录
直播中
李勇
8年用户
1391经验值
私信
关注
[问答]
怎么实现基于Arduino的PS2机械臂遥控小车的设计?
开启该帖子的消息推送
舵机
如何实现基于Arduino的PS2机械臂偏小车的设计?
回帖
(1)
王鹏
2021-10-19 14:47:28
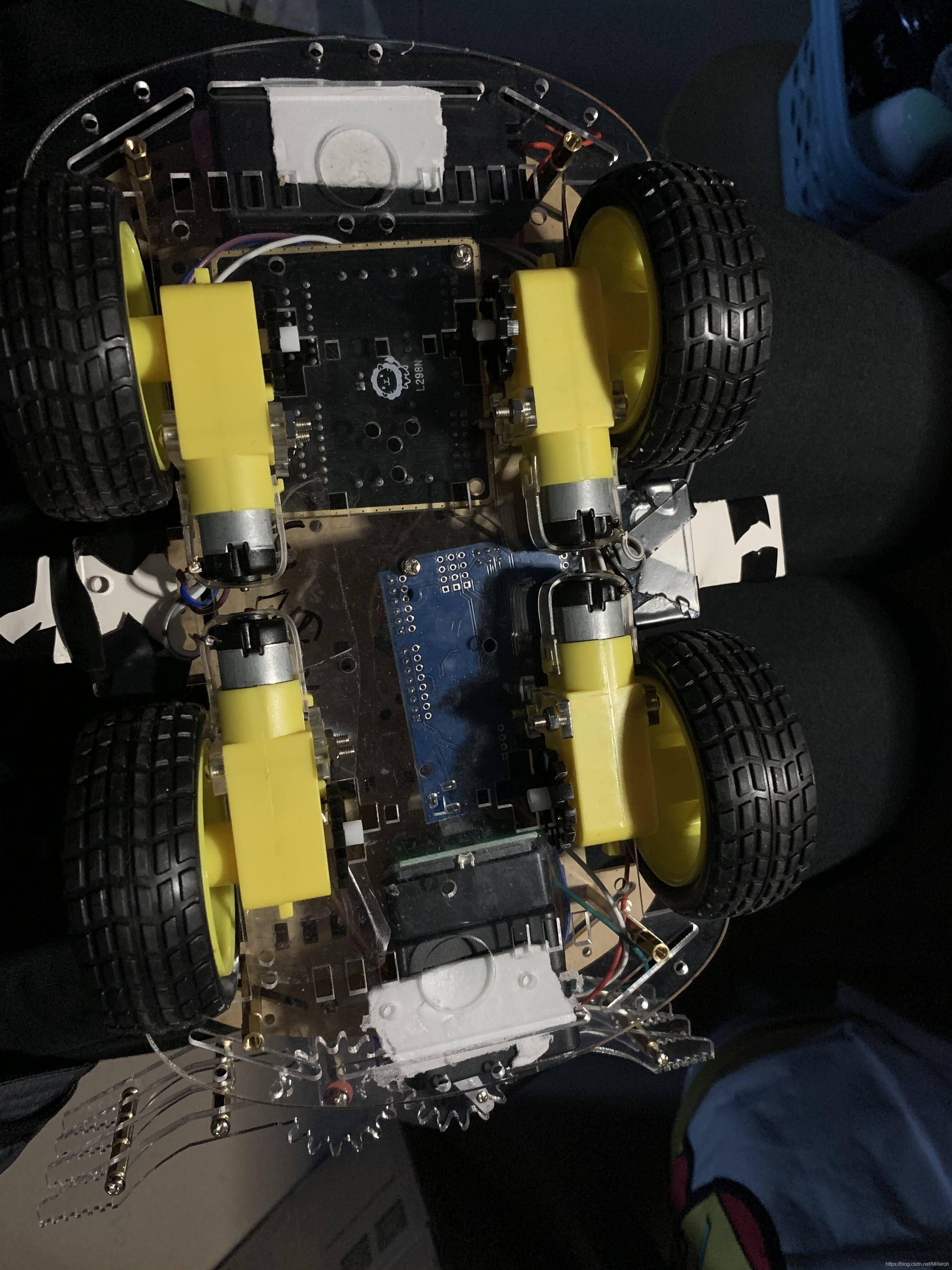
1、材料
L298N、Arduino板、数据线、舵机(SG90)、机械臂、亚克力板、电机、PS2、杜邦线、电池(7.4V)、螺丝。
如图2所示,软件
Arduino的IDE。
3,代码
一,硬件安装:
安装车底盘:
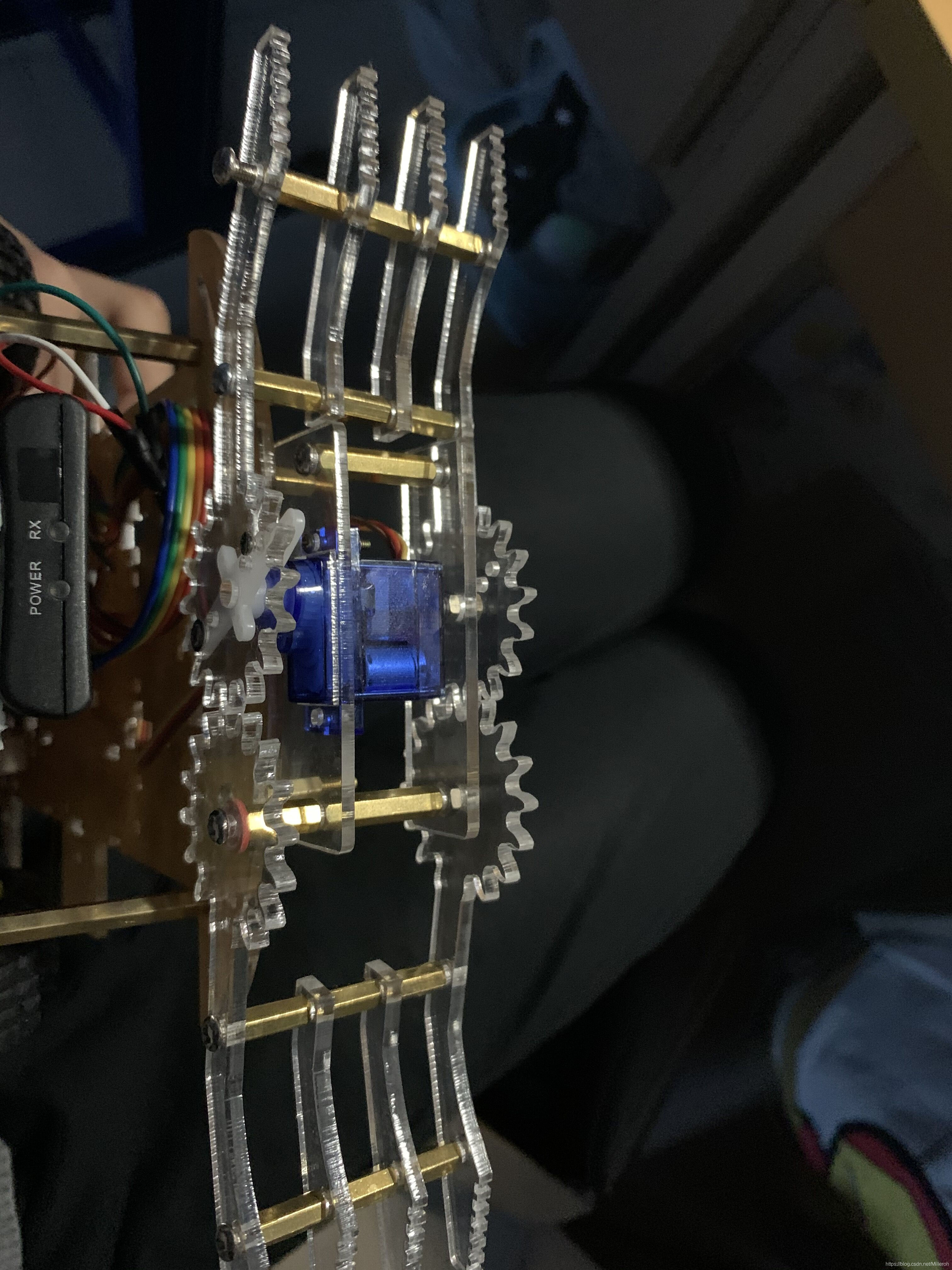
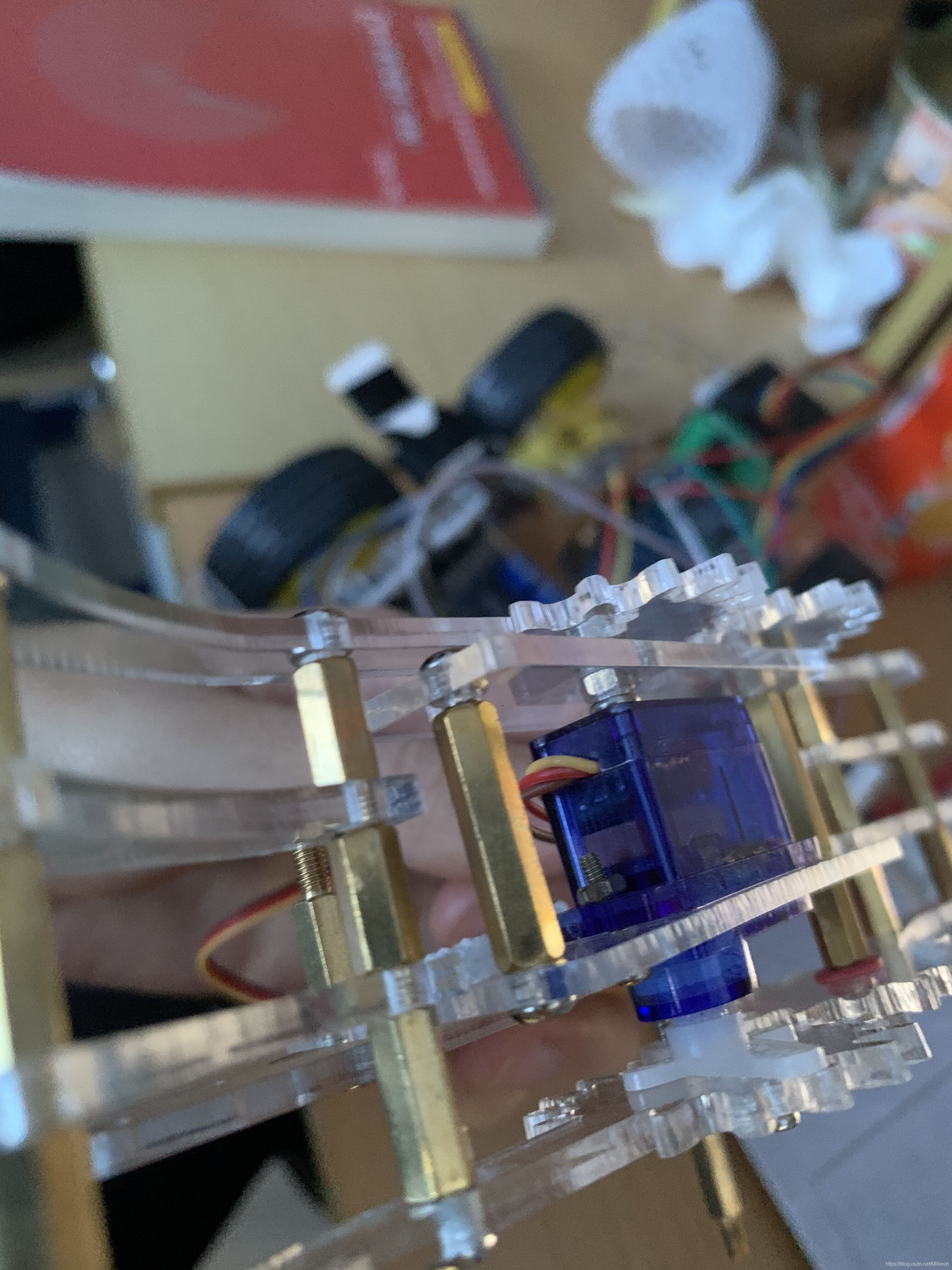
安装机械臂:
线路连接:
PS2 // CLK接13号接口; CMD接11号接口; GND接GND接口; VCC接3.3V接口; CS接10号接口; DAT接12号接口
L298N // GND接GND接口和电池负极; + 3.2V接VIN接口和电池正极; IN1接4号接口; IN2接5号接口; IN3接6号接口;IN4接口接7号接口;一组外接外接接OUT3接口;一组接接OUT4接口;左侧外接接接OUT1接口;红接外接接接口OUT2接口(
使用Arduino与L298N(使用
ArduinoL298N)
)驱动无人机电机
)
舵机//中直5V接口;棕色线接GND接口;另一根接9号接口;
二、软件安装:
安装Arduino IDE:
官网
下载PS2相关库:
PS2密码vdnt
机械臂密码fbrq
安装库:
Arduino库安装参考网址
三、代码:
#include
#define IN1 4
#define IN2 5
#define IN3 6
#define IN4 7
#define爪销9
int speed=200;
//PWM控制;
//int speedPinA = 8;
//int speedPinB = 9;PS2X ps2x; // 创建 PS2 控制器类
伺服爪;
//现在,该库不支持热插拔控制器,这意味着
//您必须始终
在连接控制器后重新启动Arduino,//或在连接控制器后再次调用config_gamepad(pins)。int error = 0;
字节类型 = 0;
字节振动 = 0;
整数 DSD = 15;
int moveStep = 45; void turnLeft() //左转
{
digitalWrite(IN1, LOW);
数字写入(IN2,高);
数字写入(IN3,低);
数字写入(IN4,高);
延迟(20);
}
void turnRight()//右转
{
digitalWrite(IN1, HIGH);
数字写入(IN2,低);
数字写入(IN3,高);
数字写入(IN4,低);
延迟(20);
}
void back() //前进
{
digitalWrite(IN1, LOW);
数字写入(IN2,高);
数字写入(IN3,高);
数字写入(IN4,低);
//analogWrite(speedPinA,speed);
//analogWrite(speedPinB,speed);
延迟(20);
}
void stop() // 停止;
{
digitalWrite(IN1, LOW);
数字写入(IN2,低);
数字写入(IN3,低);
数字写入(IN4,低);
延迟(20);
}
void forward() //后退
{
digitalWrite(IN1, HIGH);
数字写入(IN2,低);
数字写入(IN3,低);
数字写入(IN4,高);
}void setup()
{
Serial.begin(9600);
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
pinMode(IN3, 输出);
pinMode(IN4, OUTPUT);
//pinMode(speedPinA,OUTPUT);
//pinMode(speedPinB,OUTPUT);
//初始化电机驱动IO为输出方式
claw.attach(9); //爪伺服舵机连接九舵机代号'c'
延迟(200); // 稳定性等待
claw.write(90);
延迟(10);
Serial.begin(9600);
Serial.println(“欢迎来到太极机械臂教程”);
错误 = ps2x.config_gamepad(13, 11, 10, 12, true, true); //设置引脚和设置:GamePad(clock, command, attention, data, Pressures?, Rumble?) check for error if (error == 0)
{
Serial.println(“Found Controller, configure successfully”);
Serial.println(“尝试所有按钮,X 会振动控制器,越用力越快;”);
Serial.println(“按住L1或R1会打印出模拟摇杆的数值。”);
Serial.println(“去
www.billporter.info
获取更新和报告错误。”);
} else if (error == 1)
Serial.println(“未找到控制器,检查接线,查看 readme.txt 以启用调试。访问
www.billporter.info
获取故障排除提示”); 否则如果(错误== 2)
Serial.println(“控制器找到但不接受命令。请参阅 readme.txt 以启用调试。访问
www.billporter.info
以获取故障排除提示”); else if (error == 3)
Serial.println("控制器拒绝进入压力模式,可能不支持。"); //Serial.print(ps2x.Analog(1), HEX); 类型 = ps2x.readType();
switch (type)
{
case 0:
Serial.println(“未知控制器类型”);
休息;
案例1:
Serial.println(“发现DualShock控制器”);
休息;
case 2:
Serial.println(“GuitarHero Controller Found”);
休息;
}
}void loop()
{
int爪JoyPos;
ps2x.read_gamepad(假,振动);//读取控制器并将大电机设置为以“振动”速度旋转 if (ps2x.Button(PSB_START)) //只要按下按钮就会为 TRUE
Serial.println(“Start is been holding”);
if (ps2x.Button(PSB_SELECT))
Serial.println(“选择被保持”); if (ps2x.Button(PSB_PAD_UP))
{ //只要按下按钮就会为真
Serial.print("Uphold this hard:");
Serial.println(ps2x.Analog(PSAB_PAD_UP), DEC);
向前();
}
if (ps2x.Button(PSB_PAD_RIGHT))
{
Serial.print(“Righthold this hard:”);
Serial.println(ps2x.Analog(PSAB_PAD_RIGHT), DEC);
左转();
}
if (ps2x.Button(PSB_PAD_LEFT))
{
Serial.print(“LEFT 坚持住了:”);
Serial.println(ps2x.Analog(PSAB_PAD_LEFT), DEC);
右转();
}
if (ps2x.Button(PSB_PAD_DOWN))
{
Serial.print(“DOWN 坚持这个硬:”);
Serial.println(ps2x.Analog(PSAB_PAD_DOWN), DEC);
背部();
振动 = ps2x.Analog(PSAB_BLUE); //这将根据
您按下蓝色 (X) 按钮的力度来设置大电机振动速度if (ps2x.NewButtonState()) //如果任何按钮更改状态(打开到关闭,或关闭到on)
{
if (ps2x.Button(PSB_L3))
Serial.println(“L3 press”);
如果(ps2x.Button(PSB_R3))
Serial.println(“R3被按下”);
如果(ps2x.Button(PSB_L2))
{
Serial.println(“收到命令:爪子打开”);
爪子JoyPos =爪。读取()+移动步;
爪。写(clawJoyPos);
延迟(DSD);
}
if (ps2x.Button(PSB_R2))
{
Serial.println(“收到命令:爪子关闭”);
爪子JoyPos =爪。读取()-移动步;
爪。写(clawJoyPos);
延迟(DSD);
}
if (ps2x.Button(PSB_GREEN))
Serial.println(“三角形被按下”);
} if (ps2x.ButtonPressed(PSB_RED)) //如果按钮刚刚被按下,
则为TRUE {Serial.println(“Circle just press”);
stop();} if (ps2x.ButtonReleased(PSB_PINK)) //如果按钮刚刚被释放,则为TRUE
Serial.println(“Square 刚刚发布”); if (ps2x.NewButtonState(PSB_BLUE)) //如果按钮被按下或释放,
则为真{Serial.println(“X刚刚改变”);
} if (ps2x.Button(PSB_L1) || ps2x.Button(PSB_R1)) // 如果任一为真,则打印棒值
{
Serial.print(“Stick Values:”);
Serial.print(ps2x.Analog(PSS_LY), DEC); //左摇杆,Y轴。其他选项:LX, RY, RX
Serial.print(",");
Serial.print(ps2x.Analog(PSS_LX), DEC);
Serial.print(”,”);
Serial.print(ps2x.Analog(PSS_RY), DEC);
Serial.print(”,”);
Serial.println(ps2x.Analog(PSS_RX), DEC);
}
延迟(50);
}
编译上传大功告成,可以根据自己的需要对不同的事物进行改变。
1、材料
L298N、Arduino板、数据线、舵机(SG90)、机械臂、亚克力板、电机、PS2、杜邦线、电池(7.4V)、螺丝。
如图2所示,软件
Arduino的IDE。
3,代码
一,硬件安装:
安装车底盘:
安装机械臂:
线路连接:
PS2 // CLK接13号接口; CMD接11号接口; GND接GND接口; VCC接3.3V接口; CS接10号接口; DAT接12号接口
L298N // GND接GND接口和电池负极; + 3.2V接VIN接口和电池正极; IN1接4号接口; IN2接5号接口; IN3接6号接口;IN4接口接7号接口;一组外接外接接OUT3接口;一组接接OUT4接口;左侧外接接接OUT1接口;红接外接接接口OUT2接口(
使用Arduino与L298N(使用
ArduinoL298N)
)驱动无人机电机
)
舵机//中直5V接口;棕色线接GND接口;另一根接9号接口;
二、软件安装:
安装Arduino IDE:
官网
下载PS2相关库:
PS2密码vdnt
机械臂密码fbrq
安装库:
Arduino库安装参考网址
三、代码:
#include
#define IN1 4
#define IN2 5
#define IN3 6
#define IN4 7
#define爪销9
int speed=200;
//PWM控制;
//int speedPinA = 8;
//int speedPinB = 9;PS2X ps2x; // 创建 PS2 控制器类
伺服爪;
//现在,该库不支持热插拔控制器,这意味着
//您必须始终
在连接控制器后重新启动Arduino,//或在连接控制器后再次调用config_gamepad(pins)。int error = 0;
字节类型 = 0;
字节振动 = 0;
整数 DSD = 15;
int moveStep = 45; void turnLeft() //左转
{
digitalWrite(IN1, LOW);
数字写入(IN2,高);
数字写入(IN3,低);
数字写入(IN4,高);
延迟(20);
}
void turnRight()//右转
{
digitalWrite(IN1, HIGH);
数字写入(IN2,低);
数字写入(IN3,高);
数字写入(IN4,低);
延迟(20);
}
void back() //前进
{
digitalWrite(IN1, LOW);
数字写入(IN2,高);
数字写入(IN3,高);
数字写入(IN4,低);
//analogWrite(speedPinA,speed);
//analogWrite(speedPinB,speed);
延迟(20);
}
void stop() // 停止;
{
digitalWrite(IN1, LOW);
数字写入(IN2,低);
数字写入(IN3,低);
数字写入(IN4,低);
延迟(20);
}
void forward() //后退
{
digitalWrite(IN1, HIGH);
数字写入(IN2,低);
数字写入(IN3,低);
数字写入(IN4,高);
}void setup()
{
Serial.begin(9600);
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
pinMode(IN3, 输出);
pinMode(IN4, OUTPUT);
//pinMode(speedPinA,OUTPUT);
//pinMode(speedPinB,OUTPUT);
//初始化电机驱动IO为输出方式
claw.attach(9); //爪伺服舵机连接九舵机代号'c'
延迟(200); // 稳定性等待
claw.write(90);
延迟(10);
Serial.begin(9600);
Serial.println(“欢迎来到太极机械臂教程”);
错误 = ps2x.config_gamepad(13, 11, 10, 12, true, true); //设置引脚和设置:GamePad(clock, command, attention, data, Pressures?, Rumble?) check for error if (error == 0)
{
Serial.println(“Found Controller, configure successfully”);
Serial.println(“尝试所有按钮,X 会振动控制器,越用力越快;”);
Serial.println(“按住L1或R1会打印出模拟摇杆的数值。”);
Serial.println(“去
www.billporter.info
获取更新和报告错误。”);
} else if (error == 1)
Serial.println(“未找到控制器,检查接线,查看 readme.txt 以启用调试。访问
www.billporter.info
获取故障排除提示”); 否则如果(错误== 2)
Serial.println(“控制器找到但不接受命令。请参阅 readme.txt 以启用调试。访问
www.billporter.info
以获取故障排除提示”); else if (error == 3)
Serial.println("控制器拒绝进入压力模式,可能不支持。"); //Serial.print(ps2x.Analog(1), HEX); 类型 = ps2x.readType();
switch (type)
{
case 0:
Serial.println(“未知控制器类型”);
休息;
案例1:
Serial.println(“发现DualShock控制器”);
休息;
case 2:
Serial.println(“GuitarHero Controller Found”);
休息;
}
}void loop()
{
int爪JoyPos;
ps2x.read_gamepad(假,振动);//读取控制器并将大电机设置为以“振动”速度旋转 if (ps2x.Button(PSB_START)) //只要按下按钮就会为 TRUE
Serial.println(“Start is been holding”);
if (ps2x.Button(PSB_SELECT))
Serial.println(“选择被保持”); if (ps2x.Button(PSB_PAD_UP))
{ //只要按下按钮就会为真
Serial.print("Uphold this hard:");
Serial.println(ps2x.Analog(PSAB_PAD_UP), DEC);
向前();
}
if (ps2x.Button(PSB_PAD_RIGHT))
{
Serial.print(“Righthold this hard:”);
Serial.println(ps2x.Analog(PSAB_PAD_RIGHT), DEC);
左转();
}
if (ps2x.Button(PSB_PAD_LEFT))
{
Serial.print(“LEFT 坚持住了:”);
Serial.println(ps2x.Analog(PSAB_PAD_LEFT), DEC);
右转();
}
if (ps2x.Button(PSB_PAD_DOWN))
{
Serial.print(“DOWN 坚持这个硬:”);
Serial.println(ps2x.Analog(PSAB_PAD_DOWN), DEC);
背部();
振动 = ps2x.Analog(PSAB_BLUE); //这将根据
您按下蓝色 (X) 按钮的力度来设置大电机振动速度if (ps2x.NewButtonState()) //如果任何按钮更改状态(打开到关闭,或关闭到on)
{
if (ps2x.Button(PSB_L3))
Serial.println(“L3 press”);
如果(ps2x.Button(PSB_R3))
Serial.println(“R3被按下”);
如果(ps2x.Button(PSB_L2))
{
Serial.println(“收到命令:爪子打开”);
爪子JoyPos =爪。读取()+移动步;
爪。写(clawJoyPos);
延迟(DSD);
}
if (ps2x.Button(PSB_R2))
{
Serial.println(“收到命令:爪子关闭”);
爪子JoyPos =爪。读取()-移动步;
爪。写(clawJoyPos);
延迟(DSD);
}
if (ps2x.Button(PSB_GREEN))
Serial.println(“三角形被按下”);
} if (ps2x.ButtonPressed(PSB_RED)) //如果按钮刚刚被按下,
则为TRUE {Serial.println(“Circle just press”);
stop();} if (ps2x.ButtonReleased(PSB_PINK)) //如果按钮刚刚被释放,则为TRUE
Serial.println(“Square 刚刚发布”); if (ps2x.NewButtonState(PSB_BLUE)) //如果按钮被按下或释放,
则为真{Serial.println(“X刚刚改变”);
} if (ps2x.Button(PSB_L1) || ps2x.Button(PSB_R1)) // 如果任一为真,则打印棒值
{
Serial.print(“Stick Values:”);
Serial.print(ps2x.Analog(PSS_LY), DEC); //左摇杆,Y轴。其他选项:LX, RY, RX
Serial.print(",");
Serial.print(ps2x.Analog(PSS_LX), DEC);
Serial.print(”,”);
Serial.print(ps2x.Analog(PSS_RY), DEC);
Serial.print(”,”);
Serial.println(ps2x.Analog(PSS_RX), DEC);
}
延迟(50);
}
编译上传大功告成,可以根据自己的需要对不同的事物进行改变。
举报
更多回帖
rotate(-90deg);
回复
相关问答
舵机
如何使用
PS2
手柄
实现
远程
遥控
?
2022-02-07
1943
arduino
与
ps2
手柄是怎样控制智能
小车
的
2021-10-18
1870
智能
小车
如何与
机械
臂
相结合?
2021-12-27
1529
如何通过
Arduino
mega 2560读取
PS2
派的左信号并驱动运动?
2021-11-01
2977
请问资料里的
PS2
鼠标实验能用不?
2019-07-11
1526
PS2
编程问题
2013-12-11
3083
如何通过
arduino
单片机和
机械
臂
零件设计一个手柄操控自学习
机械
臂
模型?
2022-01-24
1530
怎样去设计一种基于RT-Thread的麦克纳姆轮
PS2
遥控
车呢
2021-11-11
1356
PS2
通讯协议的原理是什么?
2022-02-07
2003
如何去
实现
一种基于RT-Thread的麦克纳姆轮
PS2
遥控
车设计
2021-11-11
1629
发帖
登录/注册
20万+
工程师都在用,
免费
PCB检查工具
无需安装、支持浏览器和手机在线查看、实时共享
查看
点击登录
登录更多精彩功能!
首页
论坛版块
小组
免费开发板试用
ebook
直播
搜索
登录
×
20
完善资料,
赚取积分


 举报
举报



