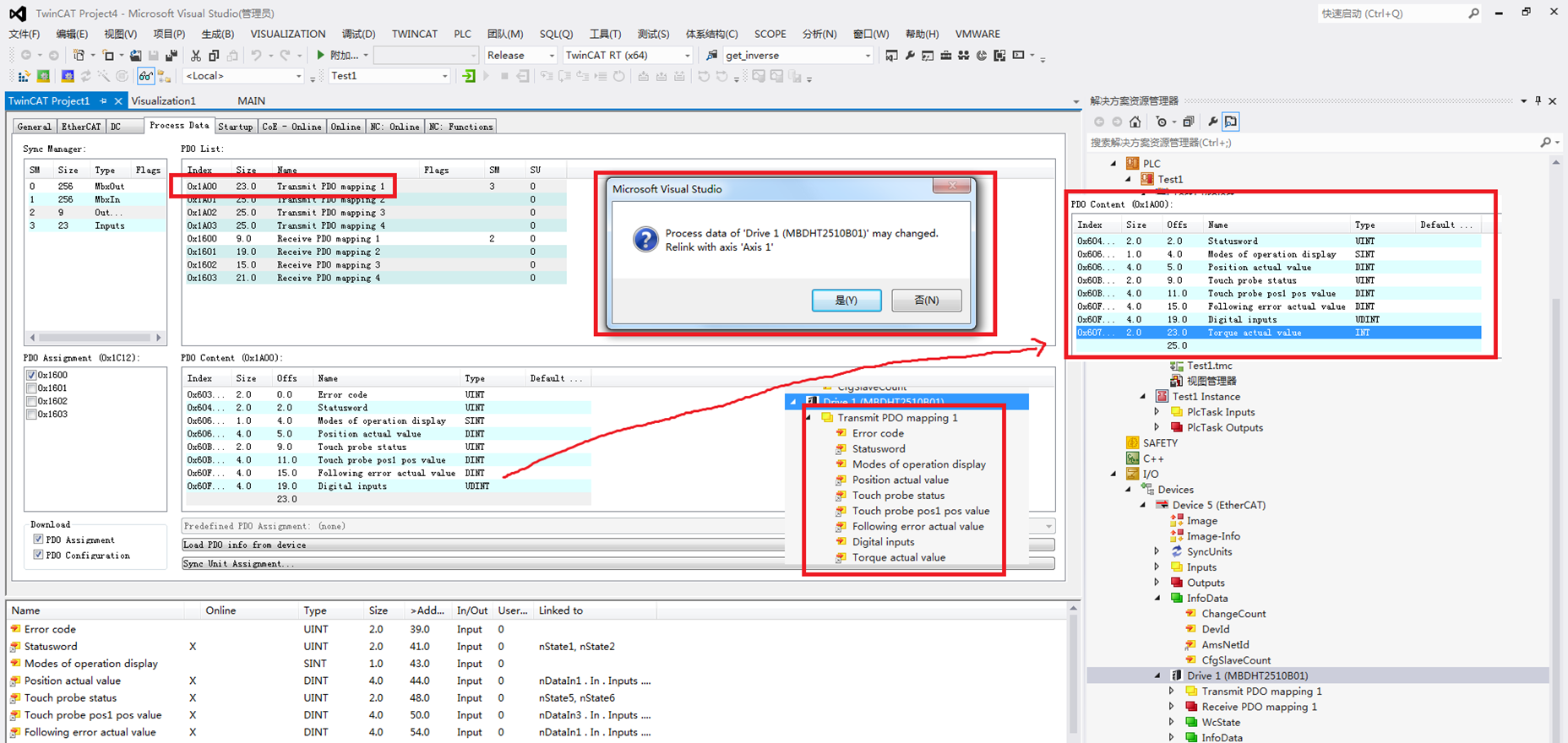
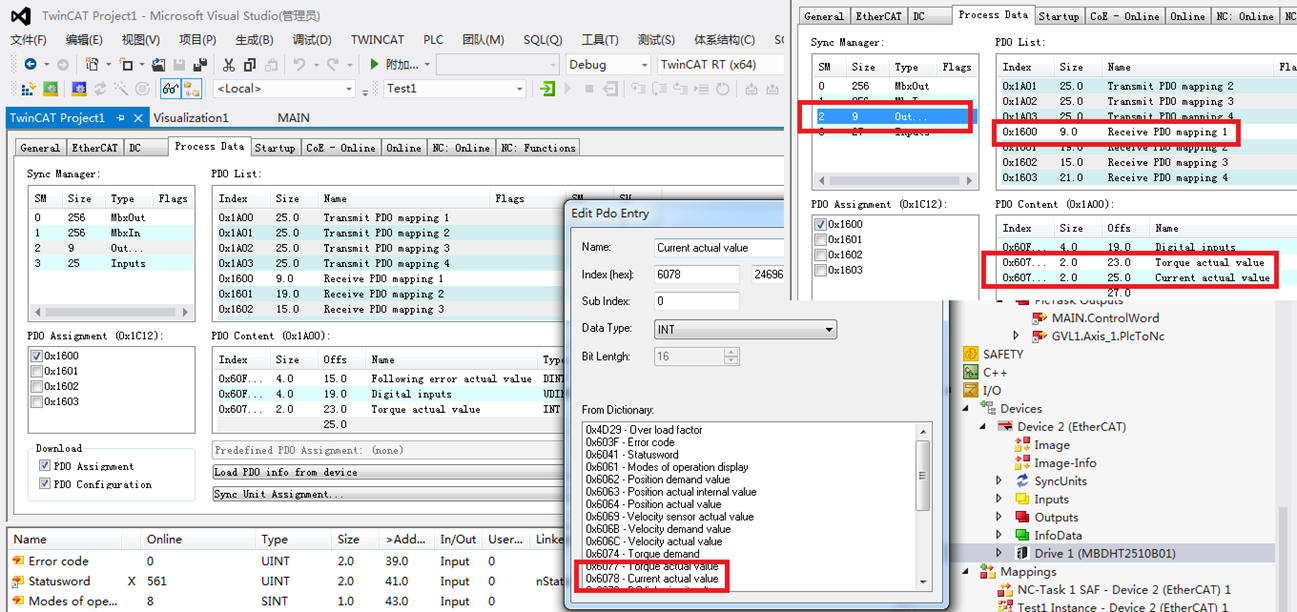
双击某个驱动器(以松下伺服驱动器为例),在Process Data中,注意默认显示了PDO mapping1的数据(Error code, status word等)
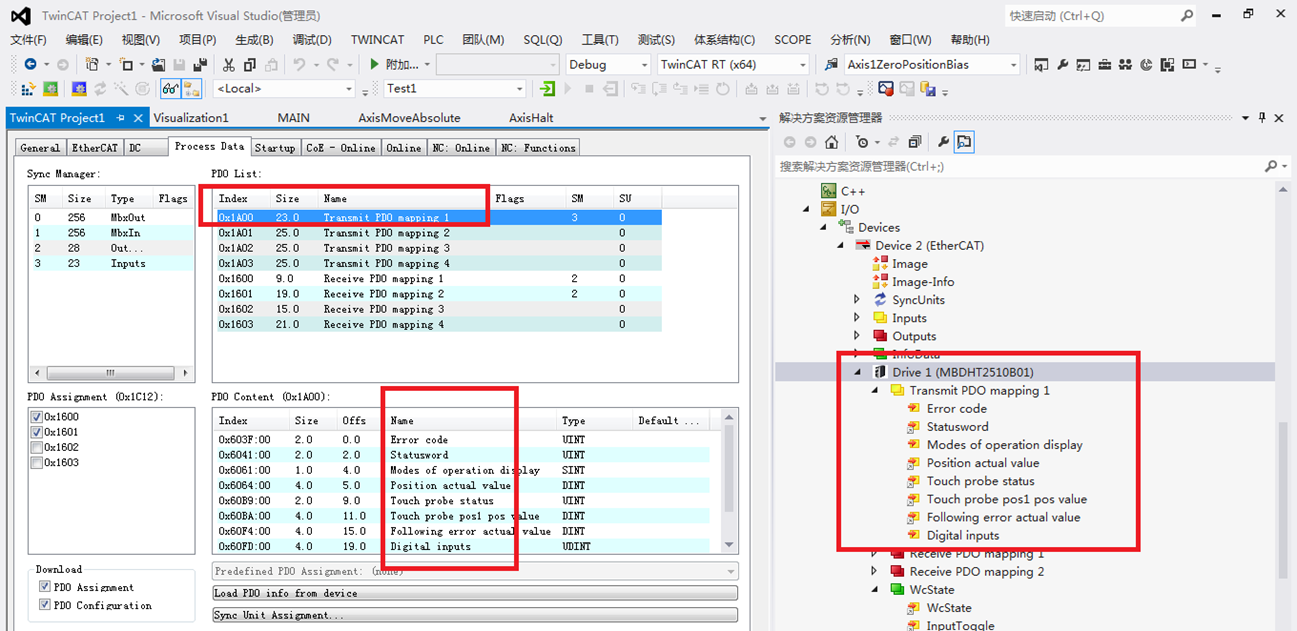
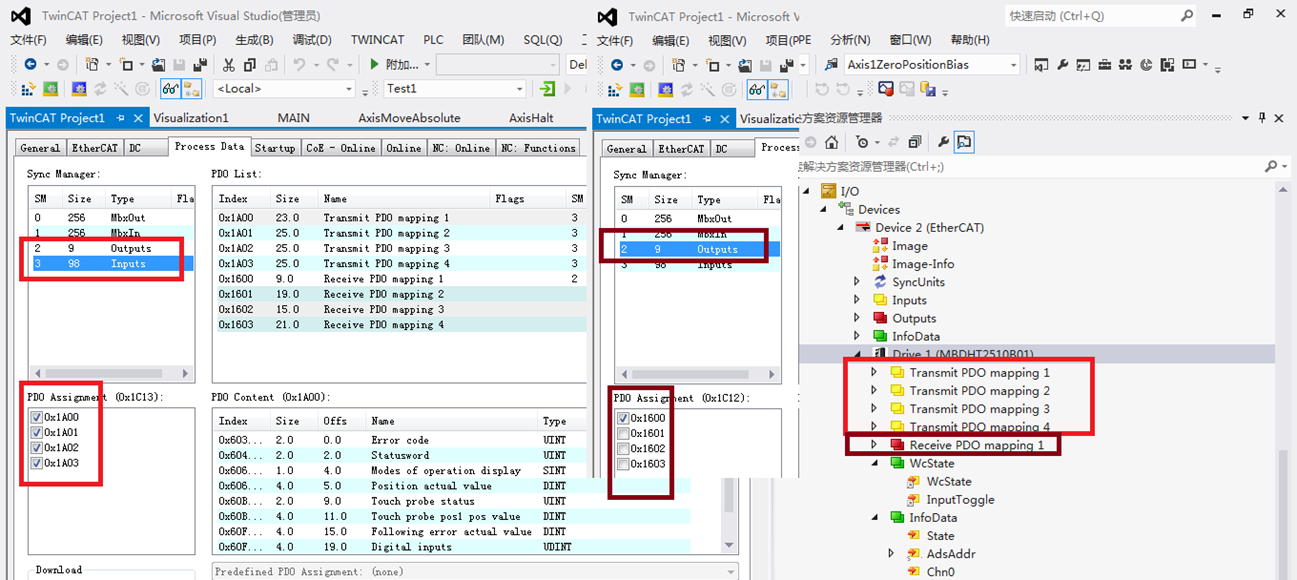
注意左侧,2和3分别表示了与驱动器的所有数据输入和输出,如果我选中2 Output之后,勾选四个选项,那么就会有PDO mapping1到4,当然如果3 Input只勾选了第一项,那么就只会有Receive PDO mapping1
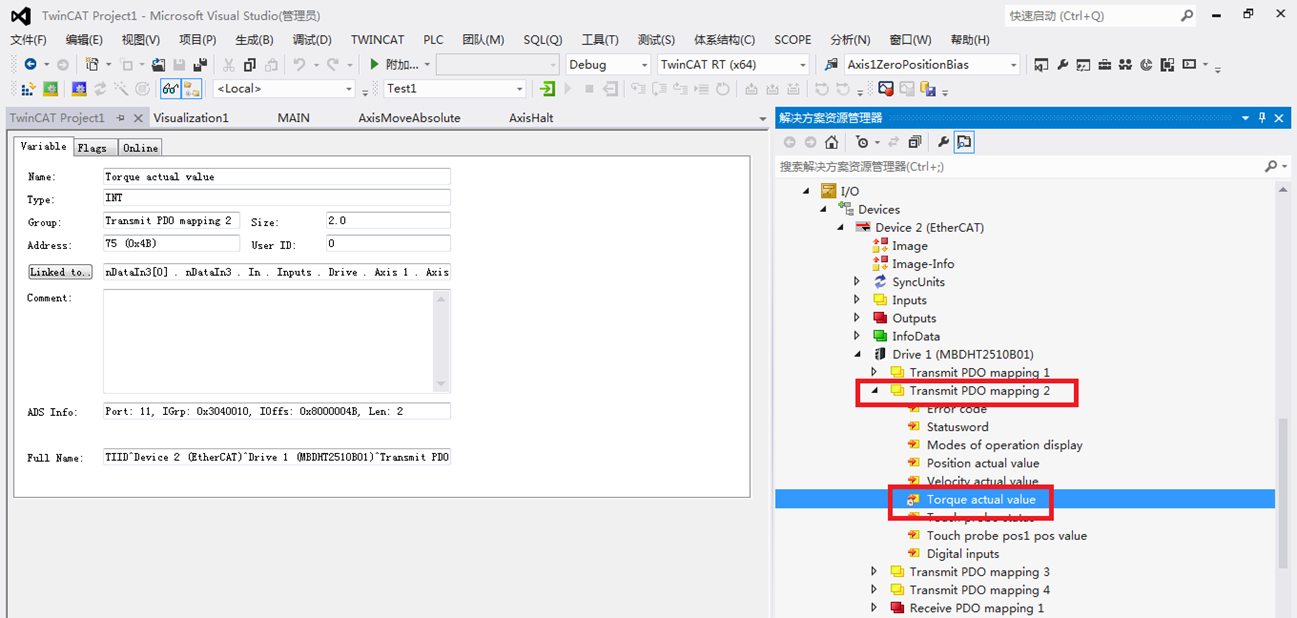
在PDO mapping2中可以找到Torque actual value
我们还是输入和输出都只勾选1项,在Receive PDO mapping1中最下面PDO Content鼠标右击Insert,然后选择Torque actual value,类型会自动变成INT,Index也会自动修改
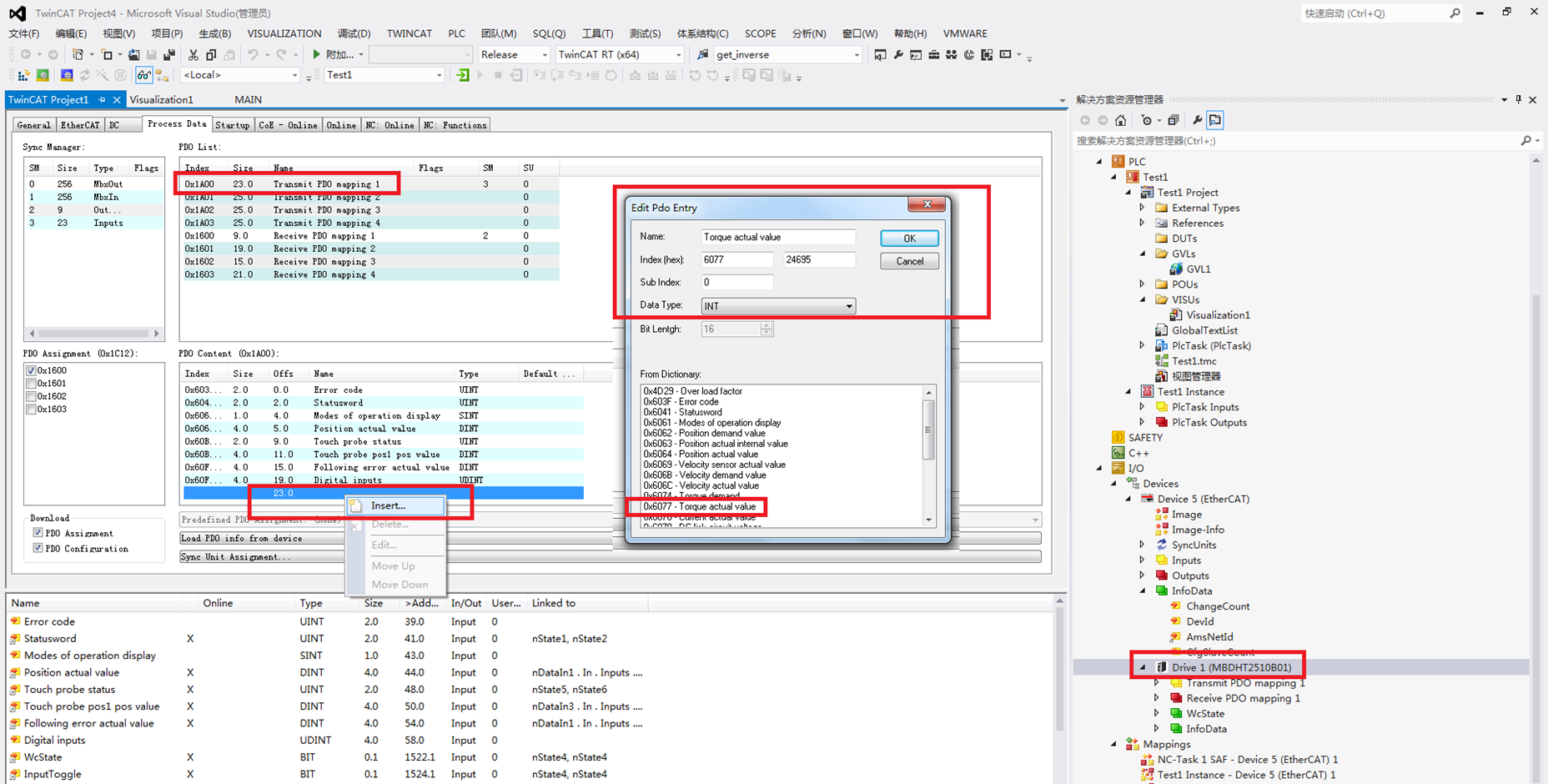
提示更新数据,更新之后在PDO mapping1中已经可以看到要监控的扭矩
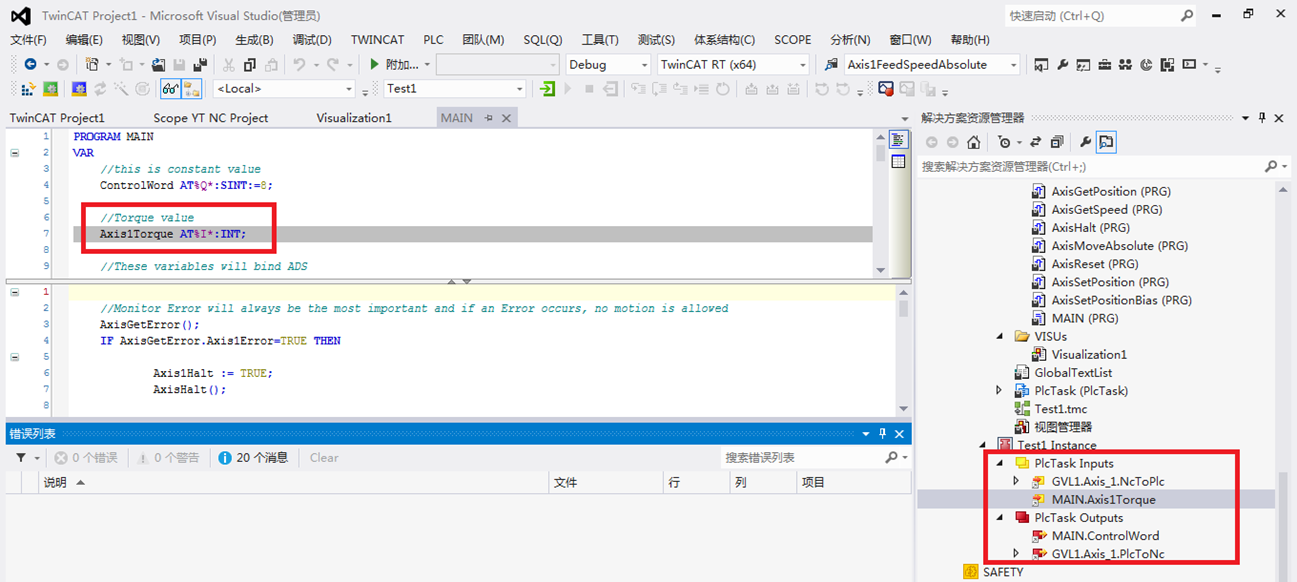
首先在MAIN程序中该定义输入输出类型变量(AT%I是输入,AT%Q是输出,如果你不确定是输入还是输出也可以先都定义一个,然后F6刷新,看在PLC的Instance中新增的变量)
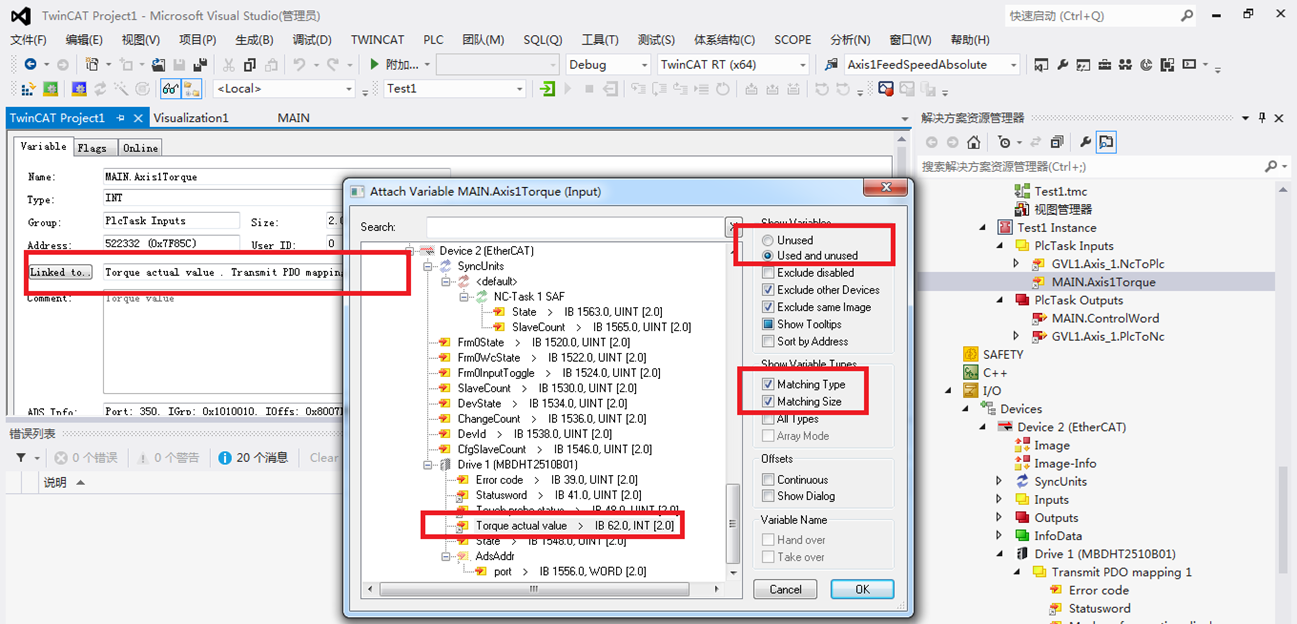
双击这个变量,Linked to弹出窗口中选择驱动器的扭矩值即可(Matching Type和Matching Size是一定的,如果找不到扭矩变量就说明你定义的类型不对,PLC的输入去链接驱动器的输出,反过来也是一样)
比如说我双击PLC的某个输出变量,就只能找到驱动器的很少的几个变量了,不包括扭矩变量
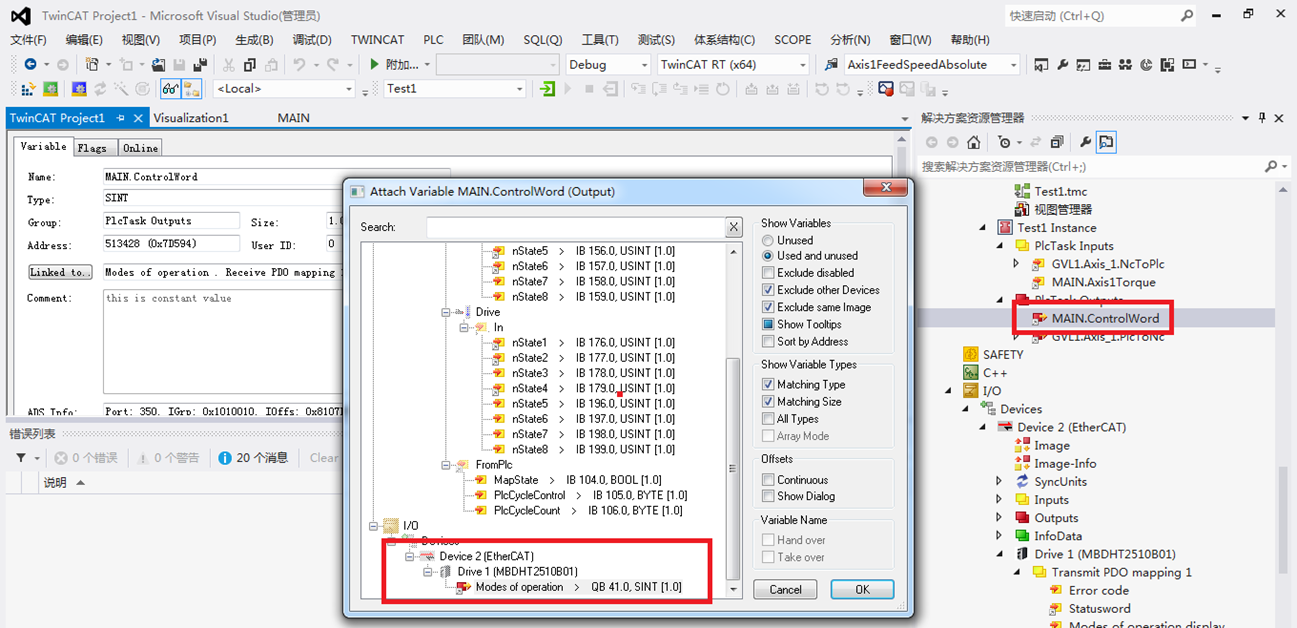
用同样的方法也可以监控实际的电流值,但是这两个数值貌似都是一样的
双击某个驱动器(以松下伺服驱动器为例),在Process Data中,注意默认显示了PDO mapping1的数据(Error code, status word等)
注意左侧,2和3分别表示了与驱动器的所有数据输入和输出,如果我选中2 Output之后,勾选四个选项,那么就会有PDO mapping1到4,当然如果3 Input只勾选了第一项,那么就只会有Receive PDO mapping1
在PDO mapping2中可以找到Torque actual value
我们还是输入和输出都只勾选1项,在Receive PDO mapping1中最下面PDO Content鼠标右击Insert,然后选择Torque actual value,类型会自动变成INT,Index也会自动修改
提示更新数据,更新之后在PDO mapping1中已经可以看到要监控的扭矩
首先在MAIN程序中该定义输入输出类型变量(AT%I是输入,AT%Q是输出,如果你不确定是输入还是输出也可以先都定义一个,然后F6刷新,看在PLC的Instance中新增的变量)
双击这个变量,Linked to弹出窗口中选择驱动器的扭矩值即可(Matching Type和Matching Size是一定的,如果找不到扭矩变量就说明你定义的类型不对,PLC的输入去链接驱动器的输出,反过来也是一样)
比如说我双击PLC的某个输出变量,就只能找到驱动器的很少的几个变量了,不包括扭矩变量
用同样的方法也可以监控实际的电流值,但是这两个数值貌似都是一样的

 1
举报
1
举报




