TwinCAT与台达伺服驱动器连接调试控制电机正反转
#软硬件情况说明
电脑系统:Win7旗舰版(64位)
TwinCAT:v3.1
网卡型号:Intel PCI Ethernet Adapter I350-T2
台达伺服电机:ECMA-EA1310RS
台达伺服驱动器:ASD-A2-1021-E(A2-E型号)
ECMA-EA1310RS伺服电机是工作电压为220V额定转速是2000rpm的绝对型交流伺服电机;ASD-A2-E是台达EtherCAT 网络通讯型伺服驱动器,可以通过EtherCAT与上位机软件进行通讯连接;
#调试步骤
在与TwinCAT进行连接调试之前,需要先单独测试伺服驱动器的驱动功能,对于该伺服驱动器可以直接通过面板测试或通过相关软件测试。
##驱动器面板测试
STEP 1:通过驱动器上按键设定参数 P2-30 辅助机能为 1,强制伺服启动。
STEP 2:设定参数 P4-05 为寸动速度(单位:r/min),输入想要的寸动速度(如100),按下 SET 键后,驱动器进入 JOG 模式。
STEP 3:按面板上的上下键,就可手动控制电机正反转。
STEP 4:按下 MODE 键时,即可离开 JOG 模式。
##台达软件测试
STEP 1:在台达官网下载安装调试软件 “ASDA_Soft” 本版本为v5。
STEP 2:通过DOP-CAUSBAB线连接驱动器的CN4口和台式机的USB口。
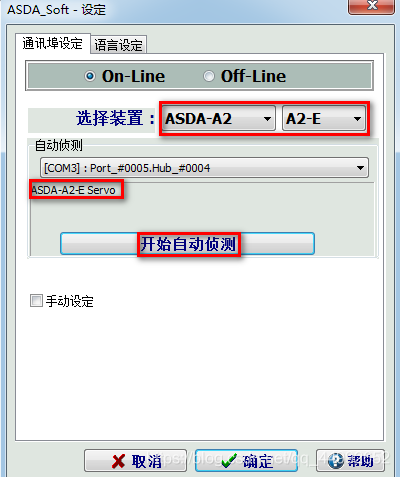
STEP 3:点击软件的设定,然后点击开始自动侦测,若连接正确则会侦测出伺服驱动器及其型号,点击确定,则软件与驱动器成功建立在线连接。
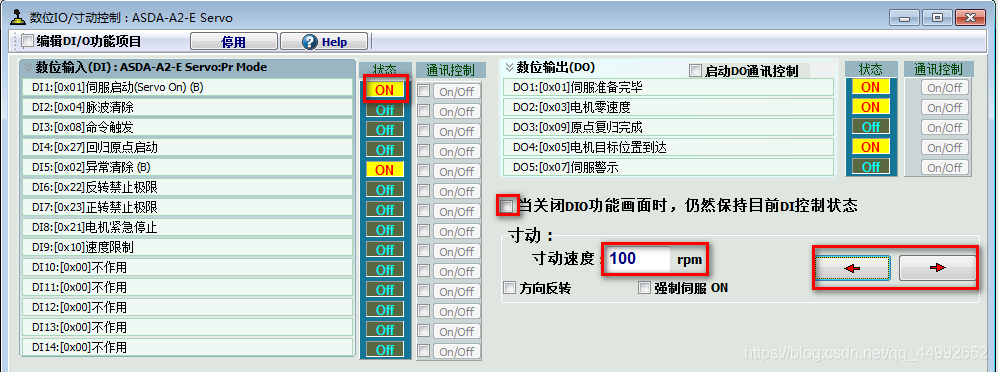
STEP 4:点击软件的数位IO/寸动控制,在数位输入DI中使伺服启动为ON,输入寸动速度,点击左右箭头即可控制正反转。
STEP 5:取消勾选“当关闭DIO功能画面时,仍然保持目前DI控制状态”,关闭该界面则软件测试结束。
##TwinCAT与驱动器连接进行电机正反转调试
STEP 1:在伺服驱动器单独测试电机正反转完成后,正确安装Intel网卡及其驱动,正确安装TwinCAT软件。
STEP 2:在台达官网下载ASDA-A2-E驱动器的XML文件,然后复制到TwinCAT的安装路径下,一般路径为“系统(C:)—TwinCAT—3.1—Config—Io—EtherCAT”。
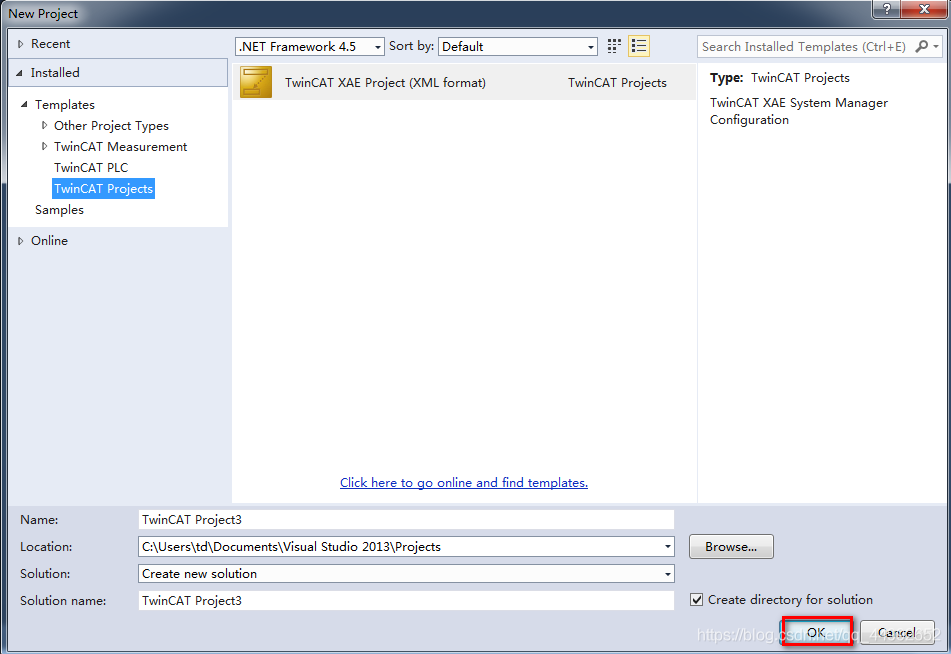
STEP 3:打开TwinCAT,新建项目,直接点击OK键。
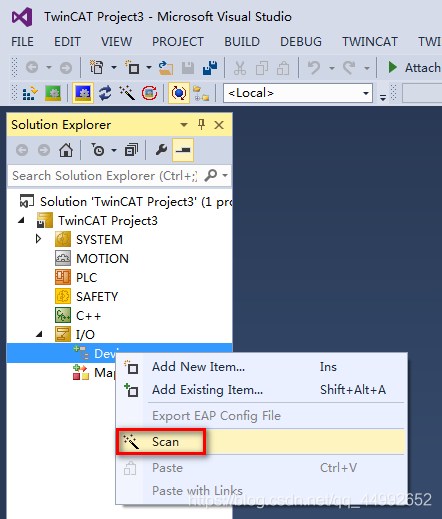
STEP 4:打开的新项目中,在左边的列表树中的I/O—Devices右键选择Scan进行扫描,对于弹出的提示框直接点击确定。
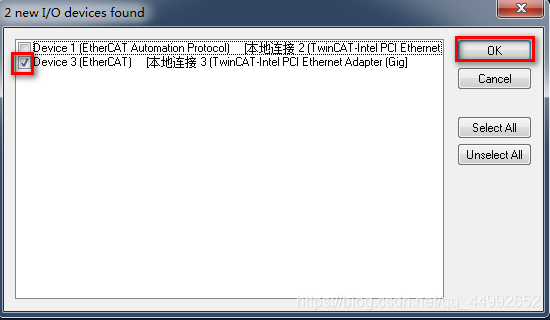
STEP 5:扫描会得到I/O devices found 结果,一般系统会直接自动勾选你连接的那个网口,点击OK,弹出的“Scan for boxes”对话框点击“是”,接下来弹出的对话框选择“NC-Configuration”,点击OK,然后会提示是否运行,点击否。此时在左边的列表树的I/O—Devices—Device x中,会出现扫描的结果,图中显示扫描出台达的伺服驱动ASDA-A2-E。
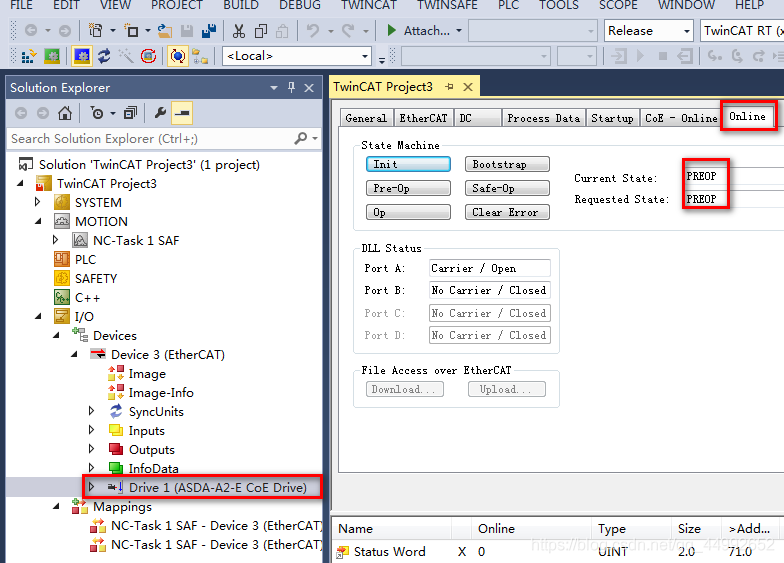
STEP 6:点击Drive 1(ASDA-A2-E),点击右边的Online,可以查看此时的伺服驱动状态是否为待运行。
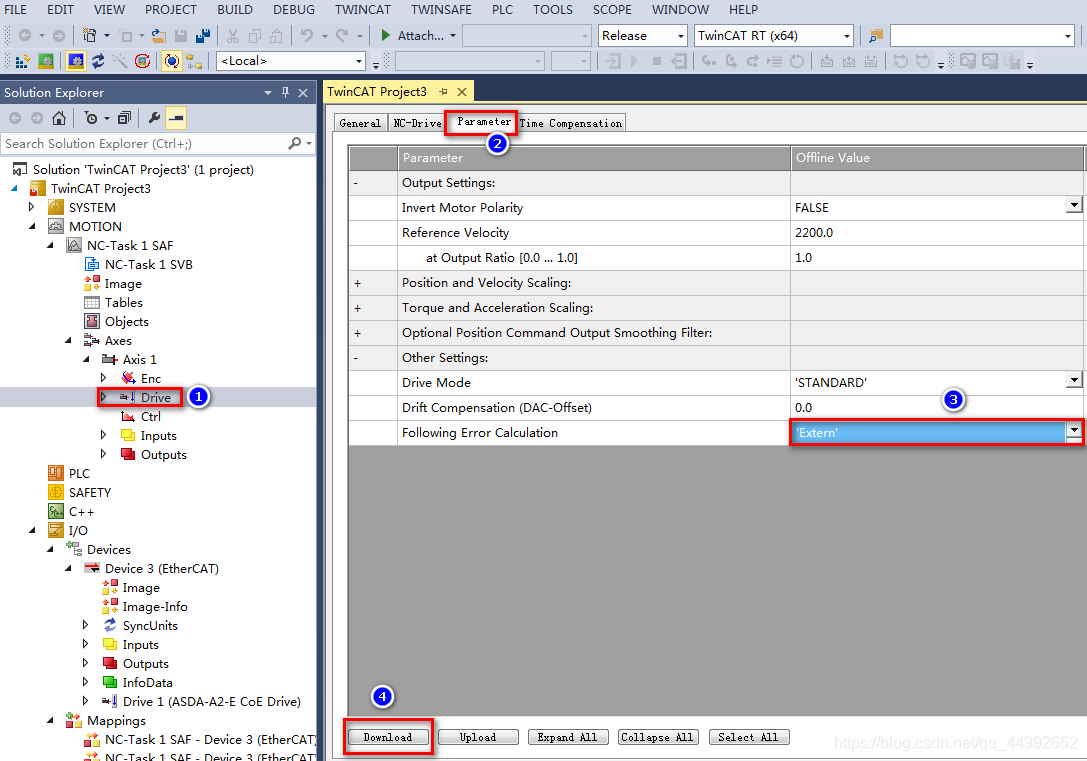
STEP 7:在左侧树MOTION—NC-Task 1 SAF—Axes—Axis 1—Drive, 在右侧窗口的 Parameter 中将 FollowingError Calculation 设定为Extern,点击Download,在弹出对话框中点击确定,然后弹出新的对话框,点击OK。
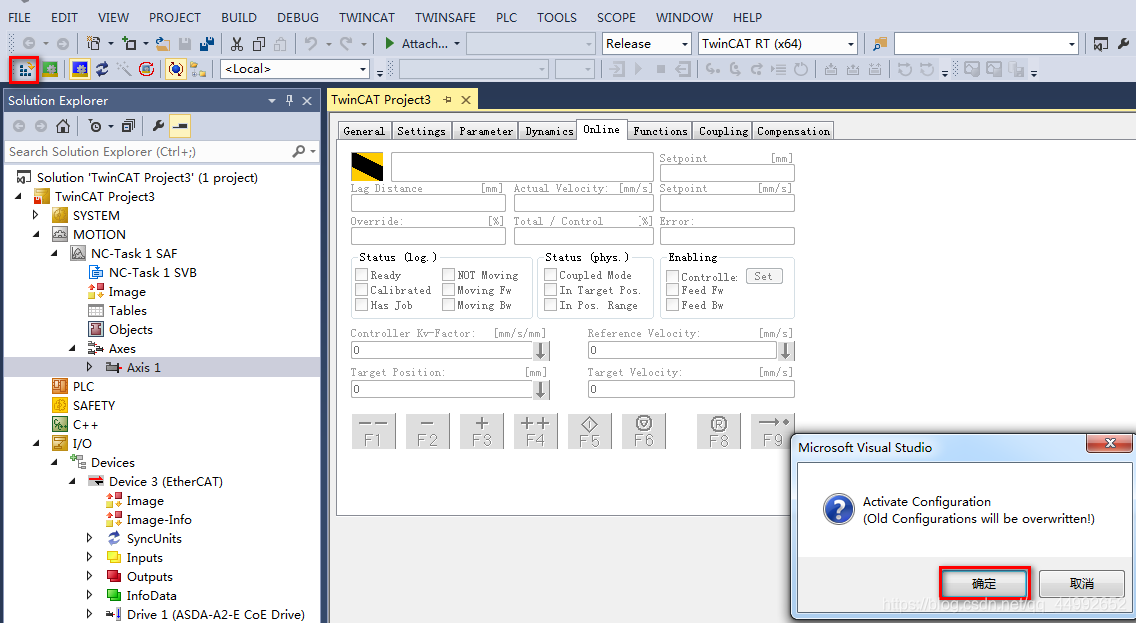
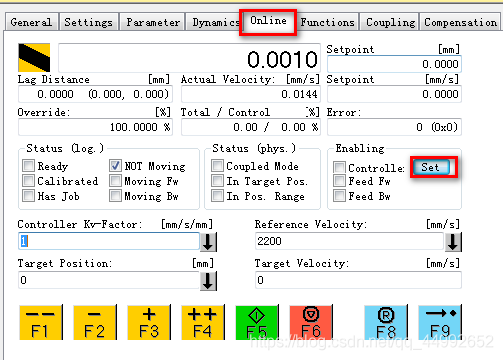
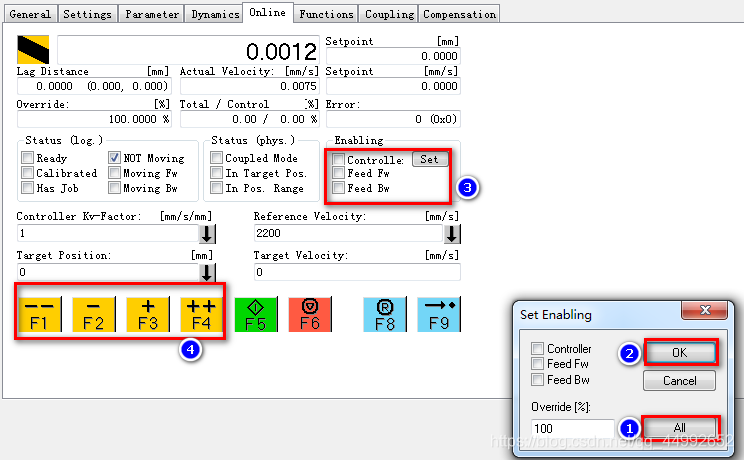
STEP 8:点击上方快捷键“Activate Configuration”,弹出的对话框点击确定,然后新弹出一个对话框,提示进入运行模式,点击确定。此时右侧的Online界面已经可以进行操作,点击Set,弹出的对话框点击All,然后点击OK。可以看到Enabling的三个框都已经被勾选,然后就可通过F1-F4进行手动调试。

TwinCAT与台达伺服驱动器连接调试控制电机正反转
#软硬件情况说明
电脑系统:Win7旗舰版(64位)
TwinCAT:v3.1
网卡型号:Intel PCI Ethernet Adapter I350-T2
台达伺服电机:ECMA-EA1310RS
台达伺服驱动器:ASD-A2-1021-E(A2-E型号)
ECMA-EA1310RS伺服电机是工作电压为220V额定转速是2000rpm的绝对型交流伺服电机;ASD-A2-E是台达EtherCAT 网络通讯型伺服驱动器,可以通过EtherCAT与上位机软件进行通讯连接;
#调试步骤
在与TwinCAT进行连接调试之前,需要先单独测试伺服驱动器的驱动功能,对于该伺服驱动器可以直接通过面板测试或通过相关软件测试。
##驱动器面板测试
STEP 1:通过驱动器上按键设定参数 P2-30 辅助机能为 1,强制伺服启动。
STEP 2:设定参数 P4-05 为寸动速度(单位:r/min),输入想要的寸动速度(如100),按下 SET 键后,驱动器进入 JOG 模式。
STEP 3:按面板上的上下键,就可手动控制电机正反转。
STEP 4:按下 MODE 键时,即可离开 JOG 模式。
##台达软件测试
STEP 1:在台达官网下载安装调试软件 “ASDA_Soft” 本版本为v5。
STEP 2:通过DOP-CAUSBAB线连接驱动器的CN4口和台式机的USB口。
STEP 3:点击软件的设定,然后点击开始自动侦测,若连接正确则会侦测出伺服驱动器及其型号,点击确定,则软件与驱动器成功建立在线连接。
STEP 4:点击软件的数位IO/寸动控制,在数位输入DI中使伺服启动为ON,输入寸动速度,点击左右箭头即可控制正反转。
STEP 5:取消勾选“当关闭DIO功能画面时,仍然保持目前DI控制状态”,关闭该界面则软件测试结束。
##TwinCAT与驱动器连接进行电机正反转调试
STEP 1:在伺服驱动器单独测试电机正反转完成后,正确安装Intel网卡及其驱动,正确安装TwinCAT软件。
STEP 2:在台达官网下载ASDA-A2-E驱动器的XML文件,然后复制到TwinCAT的安装路径下,一般路径为“系统(C:)—TwinCAT—3.1—Config—Io—EtherCAT”。
STEP 3:打开TwinCAT,新建项目,直接点击OK键。
STEP 4:打开的新项目中,在左边的列表树中的I/O—Devices右键选择Scan进行扫描,对于弹出的提示框直接点击确定。
STEP 5:扫描会得到I/O devices found 结果,一般系统会直接自动勾选你连接的那个网口,点击OK,弹出的“Scan for boxes”对话框点击“是”,接下来弹出的对话框选择“NC-Configuration”,点击OK,然后会提示是否运行,点击否。此时在左边的列表树的I/O—Devices—Device x中,会出现扫描的结果,图中显示扫描出台达的伺服驱动ASDA-A2-E。
STEP 6:点击Drive 1(ASDA-A2-E),点击右边的Online,可以查看此时的伺服驱动状态是否为待运行。
STEP 7:在左侧树MOTION—NC-Task 1 SAF—Axes—Axis 1—Drive, 在右侧窗口的 Parameter 中将 FollowingError Calculation 设定为Extern,点击Download,在弹出对话框中点击确定,然后弹出新的对话框,点击OK。
STEP 8:点击上方快捷键“Activate Configuration”,弹出的对话框点击确定,然后新弹出一个对话框,提示进入运行模式,点击确定。此时右侧的Online界面已经可以进行操作,点击Set,弹出的对话框点击All,然后点击OK。可以看到Enabling的三个框都已经被勾选,然后就可通过F1-F4进行手动调试。

 举报
举报




