随手记之-用ROBO PRO软件控制慧鱼模型(1)
慧鱼简介
诞生于德国的慧鱼创意组合模具是一款拥有将近60年历史的理想教具。用一些规范化的零件可以设计、拼接出具有实际功能的机械模型。(也就是说咱可以将一些奇奇怪怪的想法通过慧鱼模型来做一个初步的试验)
慧鱼同样提供了很多电子传感器和执行器,而且提供了非常简易的方法来控制这些电子模块,比起起通过stm32来控制电机,慧鱼控制电机可简单多了呢,这篇我想主要记录我在学习控制板的使用方法。大佬多包容嘻嘻。
慧鱼TXT控制板介绍
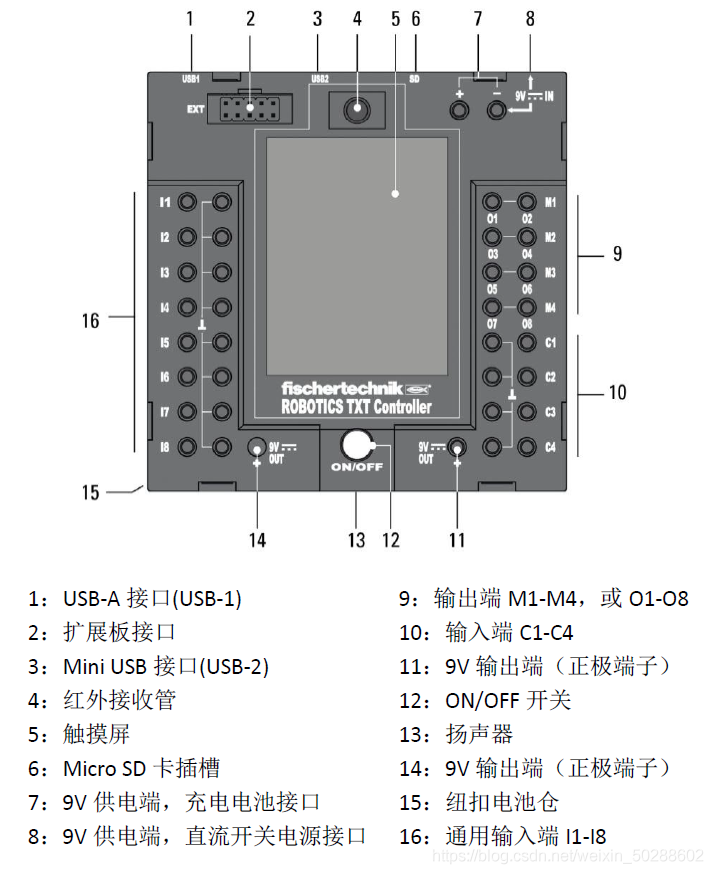
[tr]处理器内存屏幕[/tr]32位 ARMCortexA8+CortexM3128MB-DDR3RAM 64MB-FLASH2.4英寸
其实这个控制器可以理解为一个PLC,集成了两个高性能芯片,运行Linux系统。
与以往的单片机编程不同的是,单片机是将我们写好的程序直接覆盖芯片的固件,但是在txt控制板上只需要将写好的程序下载到txt的flash里,而不需要将整个系统都cover掉。
环境安装
慧鱼用一个叫ROBOpro 的软件来编写软件并下载到txt板上。安装ROBOpro一路next就行。
对于ROBOpro的汉化:
先找到程序安装的目录,如下。
里面的de、en、es这种都是存放语言的文件夹,我们选择一个语言文件夹,把里面的几个mo文件给它替换成咱的汉化的文件就行。
在这里我把de(好像是德语)里的文件替换成自己的mo文件。
打开ROBO pro软件。
在language里选择我们替换的语言,我这里替换的德语,我选German。
嘿,中文就出来了。
第一个控制程序
程序目的:模拟电动门
所需模块:控制板,接触开关*2,编码电机
大致思路:当开关一按下,电机开始转动,开关二按下,电机停止转动。
在这个实验中,我看了行程开关的介绍pdf和编码电机的介绍pdf。
感觉辣么多元器件一下子看完了也记不住,打算没做一个例程就记住一两个。嘻嘻
行程开关
一般比较常见的是单刀单掷的开关,但是慧鱼里的行程开关是单刀双掷的开关。
简单来说,没按下时1,2通路,按下时1,3通路。搁这换着玩儿呢。
编码电机
我找到了两个电机
红色的大电机叫编码电机,右边那个是普通的电机。
两者的差别是扭矩大小,和能否计算电机转动的次数(红色的可以)。
随手记之-用ROBO PRO软件控制慧鱼模型(1)
慧鱼简介
诞生于德国的慧鱼创意组合模具是一款拥有将近60年历史的理想教具。用一些规范化的零件可以设计、拼接出具有实际功能的机械模型。(也就是说咱可以将一些奇奇怪怪的想法通过慧鱼模型来做一个初步的试验)
慧鱼同样提供了很多电子传感器和执行器,而且提供了非常简易的方法来控制这些电子模块,比起起通过stm32来控制电机,慧鱼控制电机可简单多了呢,这篇我想主要记录我在学习控制板的使用方法。大佬多包容嘻嘻。
慧鱼TXT控制板介绍
[tr]处理器内存屏幕[/tr]32位 ARMCortexA8+CortexM3128MB-DDR3RAM 64MB-FLASH2.4英寸
其实这个控制器可以理解为一个PLC,集成了两个高性能芯片,运行Linux系统。
与以往的单片机编程不同的是,单片机是将我们写好的程序直接覆盖芯片的固件,但是在txt控制板上只需要将写好的程序下载到txt的flash里,而不需要将整个系统都cover掉。
环境安装
慧鱼用一个叫ROBOpro 的软件来编写软件并下载到txt板上。安装ROBOpro一路next就行。
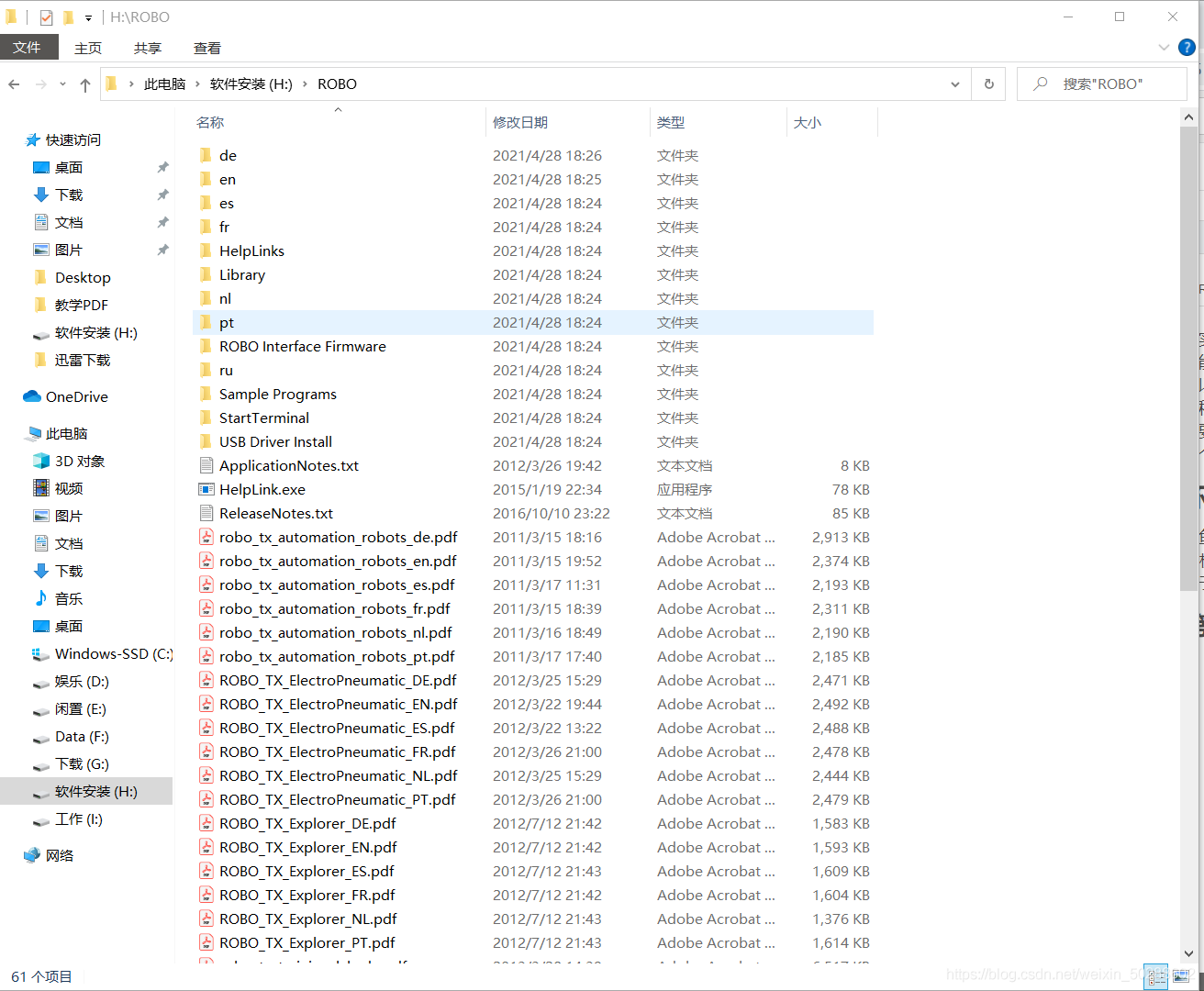
对于ROBOpro的汉化:
先找到程序安装的目录,如下。
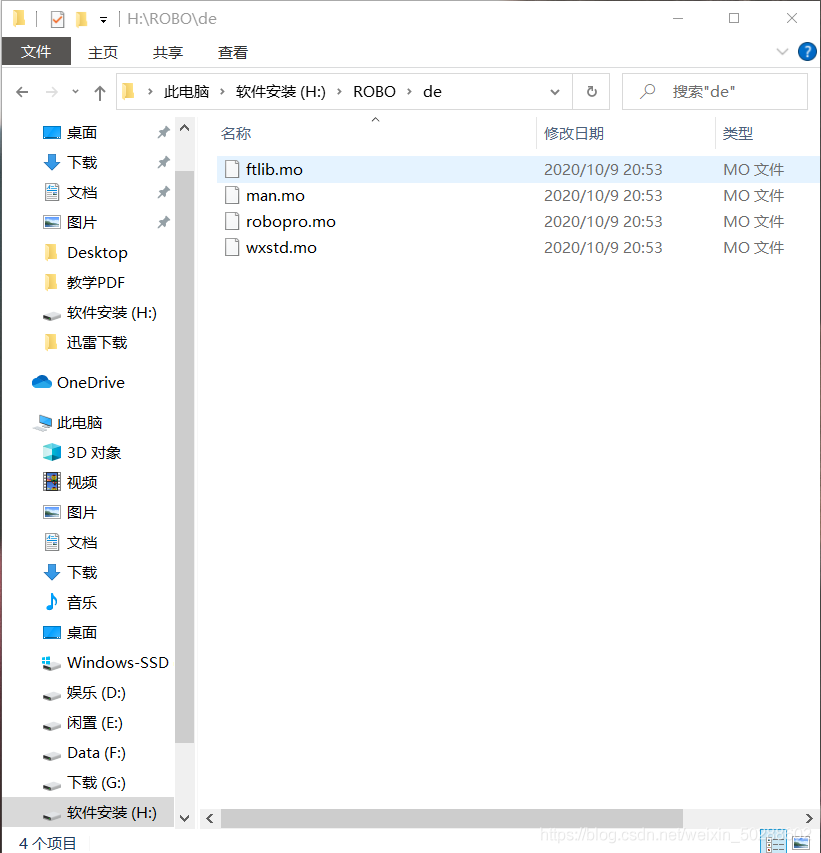
里面的de、en、es这种都是存放语言的文件夹,我们选择一个语言文件夹,把里面的几个mo文件给它替换成咱的汉化的文件就行。
在这里我把de(好像是德语)里的文件替换成自己的mo文件。
打开ROBO pro软件。
在language里选择我们替换的语言,我这里替换的德语,我选German。
嘿,中文就出来了。
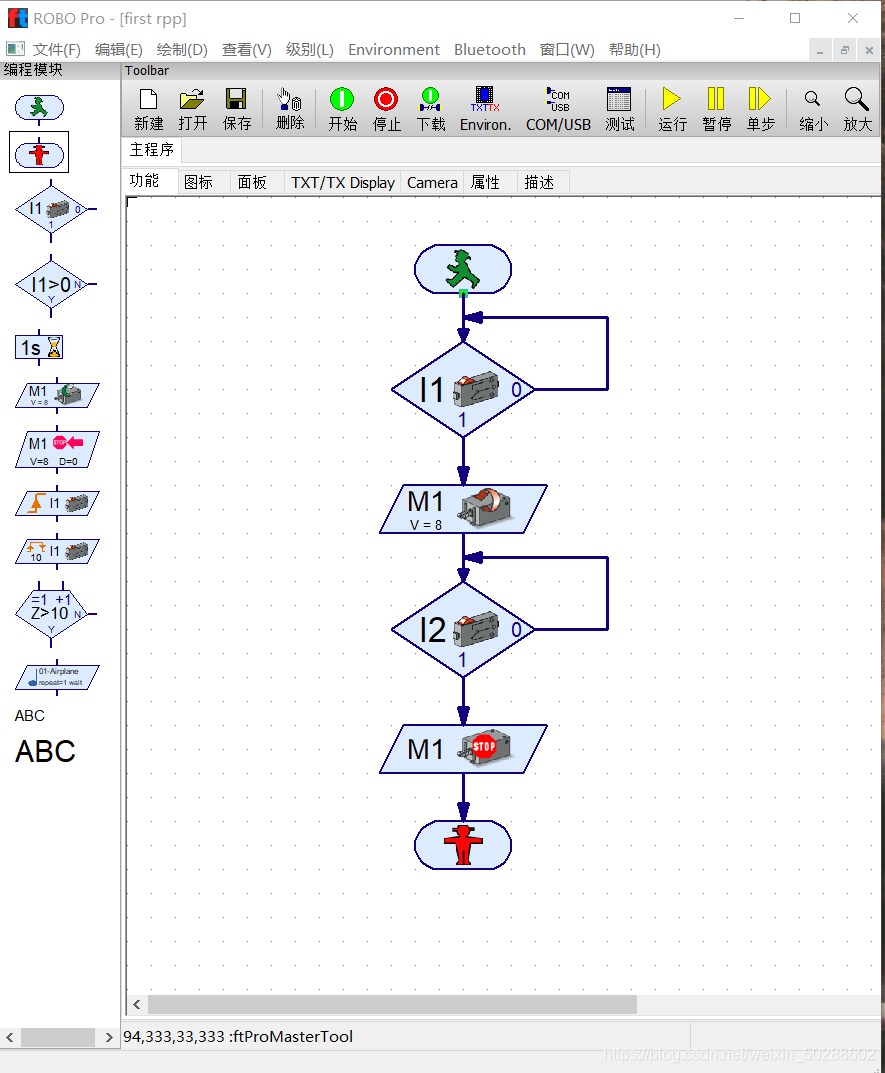
第一个控制程序
程序目的:模拟电动门
所需模块:控制板,接触开关*2,编码电机
大致思路:当开关一按下,电机开始转动,开关二按下,电机停止转动。
在这个实验中,我看了行程开关的介绍pdf和编码电机的介绍pdf。
感觉辣么多元器件一下子看完了也记不住,打算没做一个例程就记住一两个。嘻嘻
行程开关
一般比较常见的是单刀单掷的开关,但是慧鱼里的行程开关是单刀双掷的开关。
简单来说,没按下时1,2通路,按下时1,3通路。搁这换着玩儿呢。
编码电机
我找到了两个电机
红色的大电机叫编码电机,右边那个是普通的电机。
两者的差别是扭矩大小,和能否计算电机转动的次数(红色的可以)。

 举报
举报




