前言
无刷直流 (Brushless Direct Current, BLDC)电机是一种正快速普及的电机类型,它可在家用电器、汽车、航空航天、消费品、医疗、工业自动化设备和仪器等行业中使用。正如名称指出的那样,BLDC 电机不用电刷来换向,而是使用电子换向。BLDC 电机和有刷直流电机以及感应电机相比,有许多优点。其中包括:
• 更好的转速-转矩特性
• 快速动态响应
• 高效率
• 使用寿命长
• 运转无噪音
• 较高的转速范围此外,
由于输出转矩与电机体积之比更高,使之在需要着重考虑空间与重量因素的应用中,大有用武之地。

无刷电机
上一节成功实现了BLDC电机的6步转动控制,成功实现电机的正反转功能,但电机的速度还不可控制,本节将用NUCLEO-F103RB和X-NUCLEO-IHM07M1 3SH快速为大家实现BLDC的开环速度控制!
本节所用电机为2836无刷电机,电机有两组线(hall传感器线和电机三相线),工作电压24V,最大转速12000rpm:
示例详解
本节直接使用到ST的NUCLEO-F103RB和X-NUCLEO-IHM07M1 3SH 开发板进行演示
NUCLEO-F103RB对应的大致原理接线图:
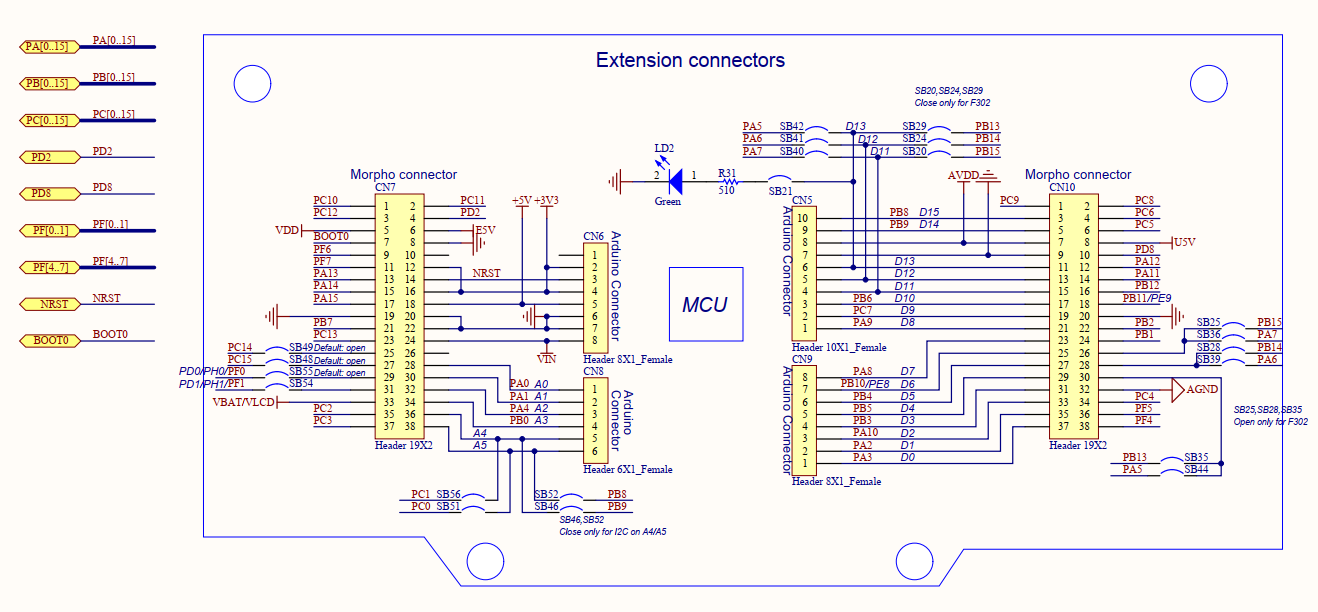
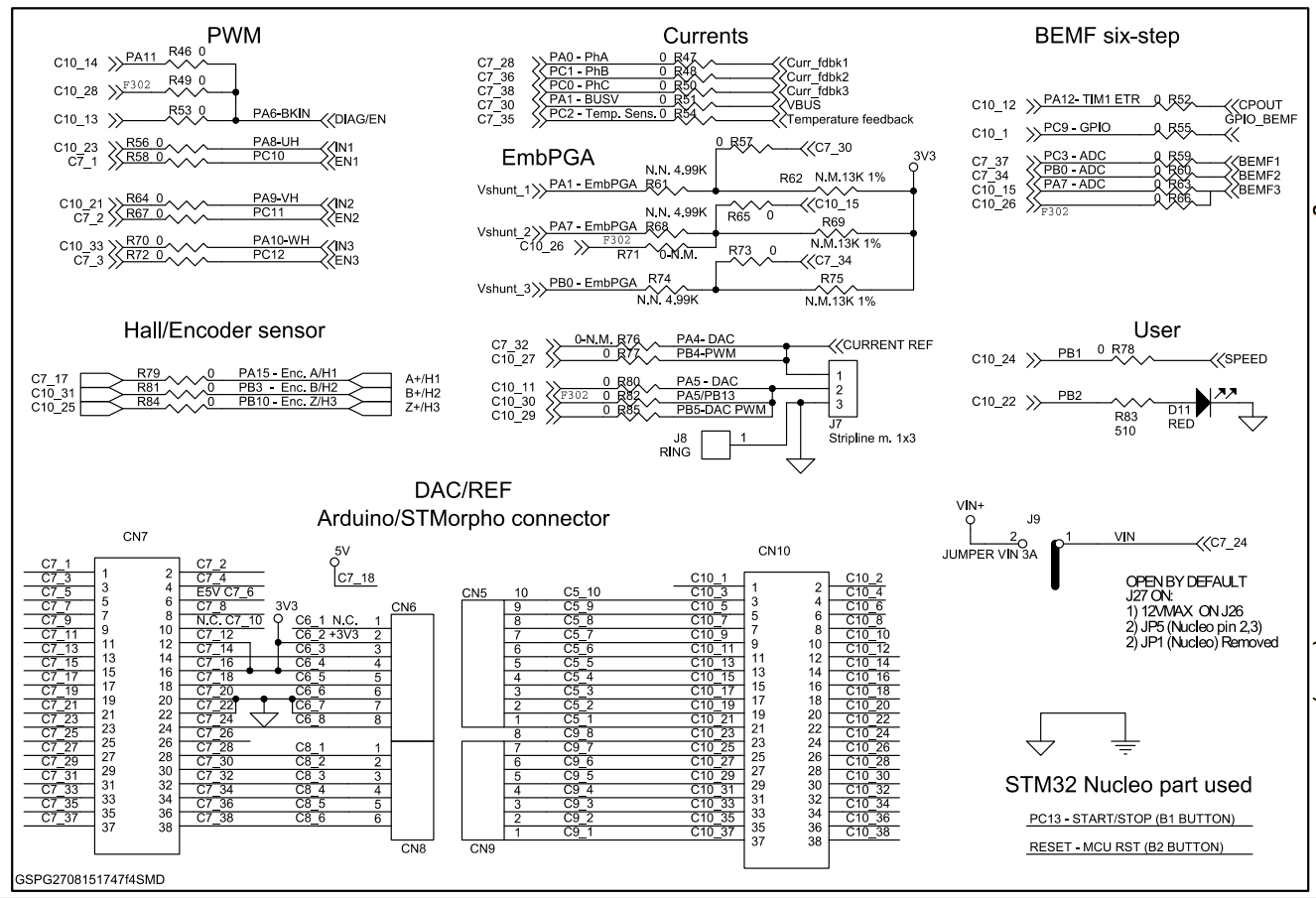
X-NUCLEO-IHM07M1 3SH部分原理图:


准备操作
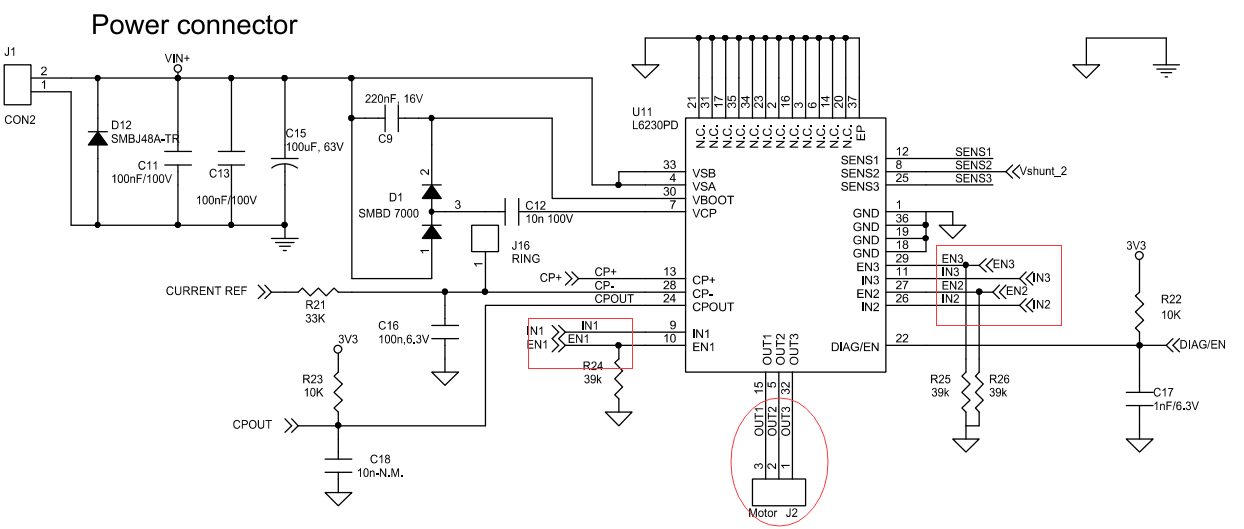
X-NUCLEO-IHM07M1 3SH是专门用于PMSM(永磁同步)或BLDC(直流无刷 )的电机驱动板,其电机驱动板驱动芯片型号为L6230(详细数据手册可在st官网下载),本节主要目的是给大家演示BLDC 6步方波控制原理,仅需让BLDC电机实现简单正反转动即可,仅需用到IN1,IN2, IN3和OUT1,OUT2,OUT3以及HALL传感器信号接口H1,H2,H3。
需要用到的信号
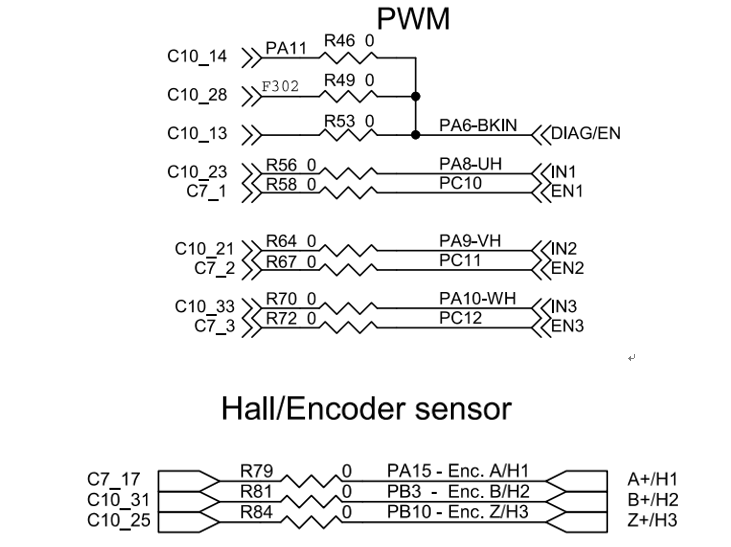
为了更加简单地介绍清楚BLDC 6 步方波控制的具体实现,为了实现电机的速度控制,本节直接使用STM32的TIM1产生三路PWM波对应信号IN1、IN2、IN3,通过调节PWM波占空比实现电机的速度控制;将EN1、EN2、EN3配置成普通输出IO口输出模式,H1,H2,H3配置成TIM2的hall传感器模式,并开启T1的捕获中断,中断触发模式为双边触发模式,在中断服务程序中实理更加快带的电机换相(6步换步)操作。
在STM32CubeMX中,有专门的NUCLEO-F103RB工程模板,新建一个Cube工程,芯片型号为st32f103rb:


生成一个简单的工程模板实现了RCC,SYS,USART2接口的配置,同时还实现了LD2(LED)引脚的配置。接下来手动配置各功能模块,首先是TIM1,配置成三路PWM 模式1输出,PWM载波频率是20Khz = 72M/(2+1)/(1199+1),各通道初始PWM波是500:


接下来是TIM2配置,开启三路输入捕获功能,使能XOR功能,开启定时器中断:

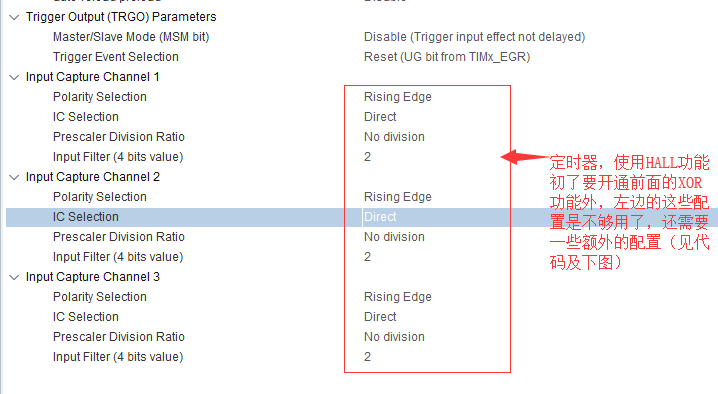
上图中所述想要直接利用TIM2的HALL传感器功能,仅在CUBE中配置是不点问题的,原因如下,在配置输入捕获通道时,很多模式不可选:

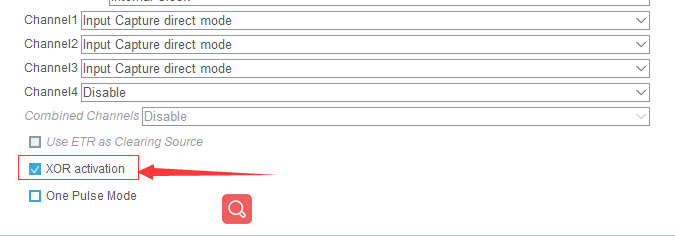
而要直正实现STM32的定时器HALL传感器接口功能,除了要开启XOR功能外(在CUBE可直接勾选):
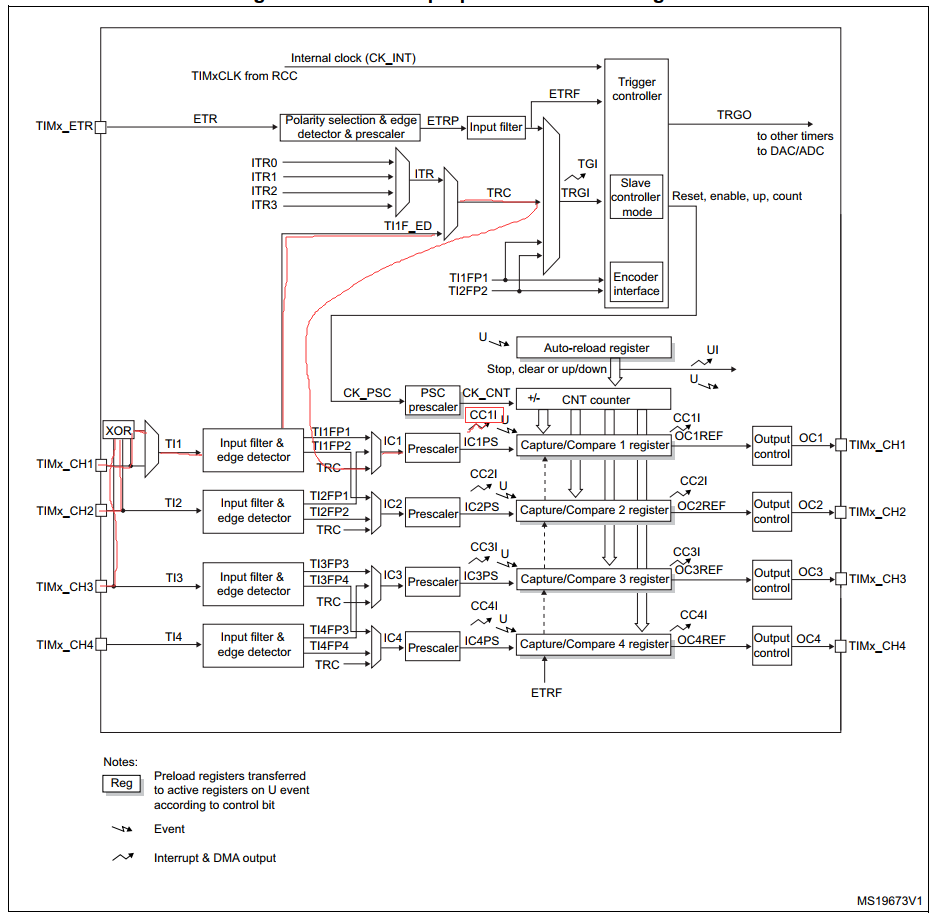
还需要用到TI1F_ED(直接的双边沿检测)信号,TRC信号。。并最终产生CC1I中断,完整的信号流图如下图:
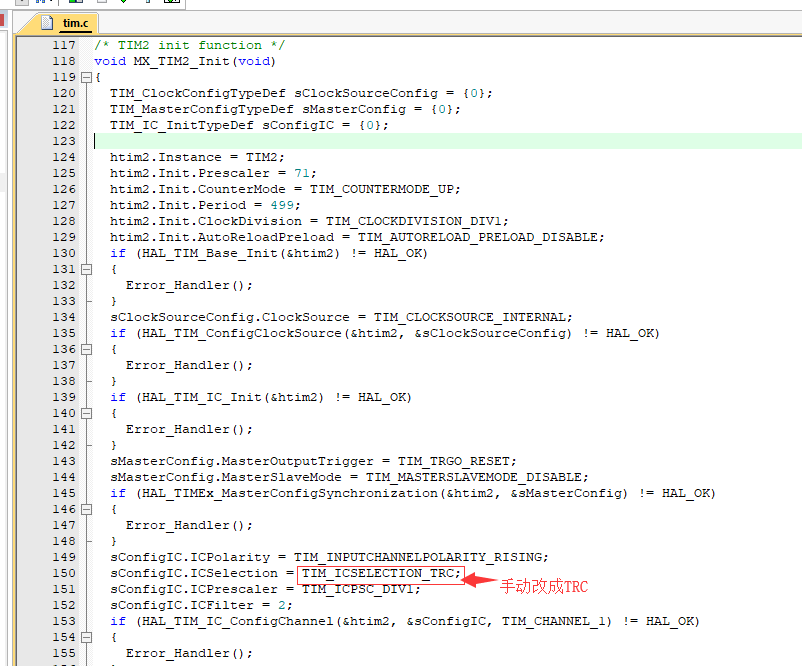
故还需要开启中断,并最终要在自动生成的TIM.C中进行适当修改(后面源码上有介绍):

最后是PC10,PC11,PC12普通IO功能配置,GPIO_OUTPUT模式,默认输出为低:

生成工程:

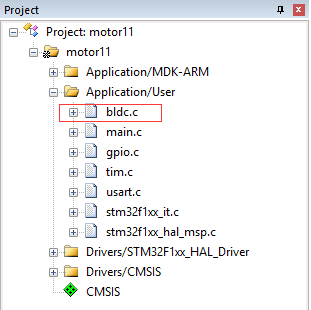
打开工程, 加入事先准备好的BLDC.C(在src文件夹)和BLDC.H(在INC文件夹)文件:
同时在tim.c及stm32f1xx_it.c中加入如下代码:


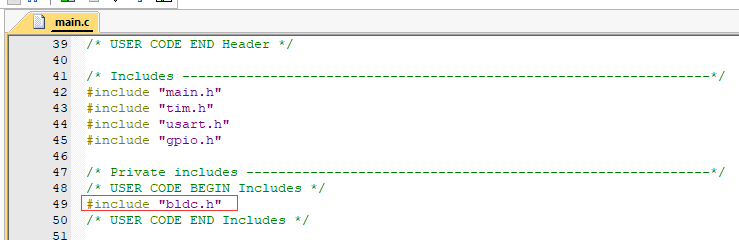
最后在main.c中加入如下代码:

设置工程下载后自动运行:


编译代码,下载程序运行可直以看到电机成功转动起来,用是按程序设定的不通pwmref值(通过BldcUpdataPwm接口设置),电机速度不同,如果有示波器可以看到三相线上的输出电压波形图如下:

Pwmref = 500电机三相波形图

Pwmref = 100 电机三相波形图
OK,本期实验完成!本节通过stm32的TIM1产生PWM来控制Bldc电机的平均工作电压,实现了对BLDC电机的开环速度控制,通过TIM2配置了hall 功能接口实现了对bldc电机hall位置的获取,在TIM2中断服务函数中完成对bldc电机的换相操作。下一节将介绍实现bldc电机的闭环电流控制。最后如果大家有什么疑问或是有想了解的其它内容,也欢迎大家留言!!最后喜欢这个公众号的同学们记得加关注了,每天都会有技术干货推出!!
前言
无刷直流 (Brushless Direct Current, BLDC)电机是一种正快速普及的电机类型,它可在家用电器、汽车、航空航天、消费品、医疗、工业自动化设备和仪器等行业中使用。正如名称指出的那样,BLDC 电机不用电刷来换向,而是使用电子换向。BLDC 电机和有刷直流电机以及感应电机相比,有许多优点。其中包括:
• 更好的转速-转矩特性
• 快速动态响应
• 高效率
• 使用寿命长
• 运转无噪音
• 较高的转速范围此外,
由于输出转矩与电机体积之比更高,使之在需要着重考虑空间与重量因素的应用中,大有用武之地。
无刷电机
上一节成功实现了BLDC电机的6步转动控制,成功实现电机的正反转功能,但电机的速度还不可控制,本节将用NUCLEO-F103RB和X-NUCLEO-IHM07M1 3SH快速为大家实现BLDC的开环速度控制!
本节所用电机为2836无刷电机,电机有两组线(hall传感器线和电机三相线),工作电压24V,最大转速12000rpm:
示例详解
本节直接使用到ST的NUCLEO-F103RB和X-NUCLEO-IHM07M1 3SH 开发板进行演示
NUCLEO-F103RB对应的大致原理接线图:
X-NUCLEO-IHM07M1 3SH部分原理图:
准备操作
X-NUCLEO-IHM07M1 3SH是专门用于PMSM(永磁同步)或BLDC(直流无刷 )的电机驱动板,其电机驱动板驱动芯片型号为L6230(详细数据手册可在st官网下载),本节主要目的是给大家演示BLDC 6步方波控制原理,仅需让BLDC电机实现简单正反转动即可,仅需用到IN1,IN2, IN3和OUT1,OUT2,OUT3以及HALL传感器信号接口H1,H2,H3。
需要用到的信号
为了更加简单地介绍清楚BLDC 6 步方波控制的具体实现,为了实现电机的速度控制,本节直接使用STM32的TIM1产生三路PWM波对应信号IN1、IN2、IN3,通过调节PWM波占空比实现电机的速度控制;将EN1、EN2、EN3配置成普通输出IO口输出模式,H1,H2,H3配置成TIM2的hall传感器模式,并开启T1的捕获中断,中断触发模式为双边触发模式,在中断服务程序中实理更加快带的电机换相(6步换步)操作。
在STM32CubeMX中,有专门的NUCLEO-F103RB工程模板,新建一个Cube工程,芯片型号为st32f103rb:
生成一个简单的工程模板实现了RCC,SYS,USART2接口的配置,同时还实现了LD2(LED)引脚的配置。接下来手动配置各功能模块,首先是TIM1,配置成三路PWM 模式1输出,PWM载波频率是20Khz = 72M/(2+1)/(1199+1),各通道初始PWM波是500:
接下来是TIM2配置,开启三路输入捕获功能,使能XOR功能,开启定时器中断:
上图中所述想要直接利用TIM2的HALL传感器功能,仅在CUBE中配置是不点问题的,原因如下,在配置输入捕获通道时,很多模式不可选:
而要直正实现STM32的定时器HALL传感器接口功能,除了要开启XOR功能外(在CUBE可直接勾选):
还需要用到TI1F_ED(直接的双边沿检测)信号,TRC信号。。并最终产生CC1I中断,完整的信号流图如下图:
故还需要开启中断,并最终要在自动生成的TIM.C中进行适当修改(后面源码上有介绍):
最后是PC10,PC11,PC12普通IO功能配置,GPIO_OUTPUT模式,默认输出为低:
生成工程:
打开工程, 加入事先准备好的BLDC.C(在src文件夹)和BLDC.H(在INC文件夹)文件:
同时在tim.c及stm32f1xx_it.c中加入如下代码:
最后在main.c中加入如下代码:
设置工程下载后自动运行:
编译代码,下载程序运行可直以看到电机成功转动起来,用是按程序设定的不通pwmref值(通过BldcUpdataPwm接口设置),电机速度不同,如果有示波器可以看到三相线上的输出电压波形图如下:
Pwmref = 500电机三相波形图
Pwmref = 100 电机三相波形图
OK,本期实验完成!本节通过stm32的TIM1产生PWM来控制Bldc电机的平均工作电压,实现了对BLDC电机的开环速度控制,通过TIM2配置了hall 功能接口实现了对bldc电机hall位置的获取,在TIM2中断服务函数中完成对bldc电机的换相操作。下一节将介绍实现bldc电机的闭环电流控制。最后如果大家有什么疑问或是有想了解的其它内容,也欢迎大家留言!!最后喜欢这个公众号的同学们记得加关注了,每天都会有技术干货推出!!

 举报
举报




