教学平台
伺服驱动器必须与电机相匹配。
伺服驱动器型号:YAKOTEC ES2-10BFI
伺服电机型号:YAKOTEC ASMJ-0B-0830B-U321
此处为样图,其展示型号与笔者所用型号有差异。
从基本理论上讲,微特电机与普通电机没有本质区别,其主要作用是完成控制信号的传递和转换,注重高精度和快速响应。微特电机分为驱动微电机和控制电机,驱动微电机在电力拖动系统中作为执行机构使用,伺服电机即为驱动微电机。
1 伺服系统配件与安装
1.1 配套线缆
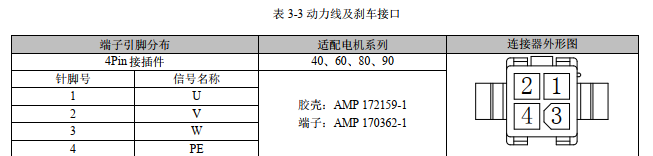
电机动力线
电机编码器线

PE线即地线。
**注意:**请不要将动力线和信号线、编码器线从同一管道内穿过,也不要将其绑扎在一起。配线时,请使动力线、编码器线和信号线相隔 30 厘米(11.8 英寸)以上,以防止电压耦合及避免噪声。
对于信号线、编码器反馈线,请使用多股绞合线以及多芯绞合整体屏蔽线。对于配线长度,信号输入线最长为 3 米(9.84 英尺),反馈线最长为 20 米 (65.62 英尺)。
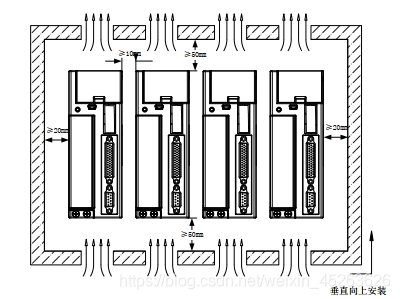
1.2 伺服器的安装与散热
通常采用垂直向上安装的方式,伺服器下方为进风口,上方为出风口。通电后不要触摸散热器,否则可能导致烫伤。
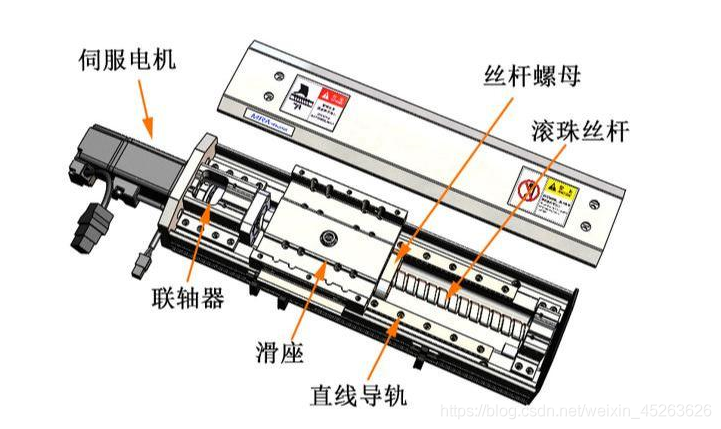
1.3 联轴器的安装
建议使用专为伺服电机设计的挠性联轴器,尤其是使用双弹簧联轴器,其在偏心和偏转时可以提供一些公差缓冲的裕度。请针对操作条件选择合适的联轴器尺寸,不适当的使用或连接可能会导致损坏。
使用时须将电机轴端的防锈涂层或油质擦掉。
2 伺服驱动器与伺服电机连接
伺服系统总体结构图如下:

2.1 主回路

在单相AC电源输入中,R相当于(电源插头中的)L,S相当于N,但实际上由于交流电没有正负的原因,无论怎么接设备都可以正常运作。
关于接地:实际上设备不接地也可以正常工作,但是在这种情况下,设备漏电将导致设备外壳带电,会引发触电风险;不过只要接入漏保,一旦线路中的漏电电流超过漏保的动作电流,它就会跳闸。在有漏保的情况下设备是否接地,其区别在于,接地时若设备漏电且超过动作电流,则漏保将自动断开;未接地时若设备漏电,漏保通常在人接触金属壳体后才会断开(此时可能造成危险;若电流不大甚至不会动作)。
3 漏电开关有接地和没接地的区别
伺服电机与普通电机不同,故接线连反也不会改变旋转方向,但若连接线顺序错误,马达就不会旋转;通常也不存在星形和三角形接线。
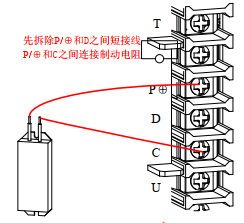
要点: 主回路电源输入端子(RST)支持单相或三相AC220V电源输入(不一定所有伺服驱动器都支持单相和三相电);在不接再生电阻连接端子时,默认P+与D短接;单机无需进行共母线连接(P+、○);
即使关闭电源,伺服驱动器内部仍可能会滞留高电源,请暂时(10 分钟)不要触摸电源端子。并请确认“CHARGE”指示灯熄灭后,再进行检查作业。
再生电阻的连接与设置
关于再生电阻和制动电阻
从功能方面说,两者不是一类电阻。
制动电阻主要就是在变频器带动的电机需要停车时,采用能耗制动方式,把停机后的动能和线圈中的磁能,通过一个制动电阻消耗掉,从而达到保护变频器的作用。
再生电阻则是当伺服电机模式驱动时,再生电力回归到伺服放大器测,这部分电力首先通过平滑电容器的充电来吸收,超出可充电能量后,再用一个电阻器来消耗。这就是再生电阻器的由来。
电阻器从材质上分类,两者可一样,可不一样的。在一般情况下,两者都采用网状不锈钢电阻器。
接通控制回路电源和主回路电源后,母线电压指示灯显示无异常,且面板显示器显示“rdy”,表明伺服驱动器处于可运行的状态,等待上位机给出伺服使能信号。
3.1 控制信号CN1
伺服电机可以接收模拟信号、脉冲信号和总线通信信号。
用于连接上位控制器,进行IO信号控制,所有的输入和输出信号都经此接口出入驱动器。
由于CN1控制端子定义较多,此处只展示常用端子:

并非所有引脚都会用到,具体用到哪些引脚可参考下一节【伺服信号线】。伺服驱动器在不同引脚有相同的名称时,表示在驱动器内部时相互连接。
伺服驱动器的位置给定(伺服定位)有3种方法:
一种是用脉冲和方向信号共同控制,即脉冲数控制位移,方向信号控制正反转;
第二种是正转脉冲CCW和反转脉冲CW输入控制;
第三种是90°相位A/B两相脉冲输入。
这3种方法中第一种最为常用,因而需要接入PULS端子和SIGN端子(这两类端子被称作低速脉冲端,因此还存在高速脉冲端);为了形成闭环控制还需接入编码器输出信号,通常接入AB相信号即PAO端子和PBO端子;千万注意不要忘记接入使能ON信号,此外通常还需要接24V和COM端子。
差分传输
差分传输是一种信号传输的技术,区别于传统的一根信号线一根地线的做法,差分传输在这两根线上都传输信号,这两个信号的振幅相同,相位相反。在这两根线上的传输的信号就是差分信号。信号接收端比较这两个电压的差值来判断发送端发送的逻辑状态。
差分输出与单端输出
差分输出有两个输出端,输出的信号是两输出端之间的电压差;单端输出只有一个输出端,输出地信号是输出端对地的电压。
伺服信号线
通常不会配送伺服信号线,只会配未组装的通讯头,接线由用户设计并完成线与通信头的焊接:

以位置控制模式为例,配线可参考用户手册中的“位置控制模式配线”并结合上述所列伺服驱动器端口定义:


此符号代表驱动信号输入端。

此符号代表双绞线。
使能ON
只有当产生使能ON信号时,才可对电机进行控制(此时表现为无法转动电机轴,即通电自锁;并伴随噪音)。
使能ON信号可由内部产生或从外部接入(通常需要设置使能信号的来源)。在进行外部控制时如果没有接入使能信号,那么电机将不会转动。
注意上图中的伺服使能S-ON信号输入端口为DI1,一些伺服驱动器的IO口可以对其进行功能选择,即图中的DI1-DI8任意端口都可设置为使能ON信号输入端口。
外部信号的输入顺序
首先接入电源,等待伺服驱动器开机并完成初始化(听到继电器响声);接入使能ON信号;接入脉冲+方向信号。
这是一个标准的外部信号输入顺序,但实际上同时接入并不会影响伺服驱动器的正常工作,但不能确保这样是否会对机器造成损伤。
3.2 编码器接口CN2

关于编码器的A、B、Z相
编码器是测量速度、位移、旋转位置的设备,把角度位移或直线位移转换成电信号,以通讯方式传送给控制器。编码器分为增量式和绝对式两种。A相、B相、Z相旋转输出脉冲电压,三相脉冲各自独立,A相和B相脉冲量相等,但是A相和B相之间存在一个90°(电气角的一周期为360°)的电气角相位差,可以根据这个相位差来判断编码器旋转的方向是正转还是反转,正转时,A相超前B相90°先进行相位输出,反转时,B相超前A相90°先进行相位输出。Z相为一圈一个脉冲电压。
3.3 Mini USB通讯CN5
通过CN5,可以建立PC和驱动器的通讯,实行对驱动器状态监控、测试运行、参数读写等操作。
一些伺服驱动器支持网口通讯。
此端口很少用到。
4 上位机程序配置与接线
通常使用PLC作为上位机,由于我并没有通过PLC控制伺服电机,因此只会进行一个简单的概述。
使用上位机控制伺服电机所需完成的工作:


5 面板显示与参数配置
不同型号的伺服电机显示略有差异,不具备普适性,此处仅做参考。
注意:下列图片摘抄自研控和杰美康手册,并非单一手册。
5.1 伺服驱动器的基本运行状态显示
状态显示分为位数据和缩略符号:
位数据:

缩略符号:
5.2 面板操作
键位
操作面板5个按键功能如下图所示:
操作模式及其切换
伺服驱动器共有四种功能模式,分别为状态显示模式、监控模式、参数设置模式、辅助模式,它们之间的切换流程如下:

子菜单设置
按MODE键可以进入0级菜单(Pxx三位显示,表示功能码的Pxx组)切换功能码组(再按一次MODE键返回且不保存数据,下同),可通过上下三角键修改闪烁位,按移位键可移动闪烁位,便于设置为所需的组号;
组号设定完成后按SET键进入I级菜单(Pxx.xx五位显示,表示功能码序号)设置所需要的功能码序号;
功能码序号设定完成后按SET键进入II级菜单进行该功能码的参数修改(如果该参数允许修改,其最低位会闪烁显示);
功能码的参数修改完成并按SET成功保存后,将显示DONE(若对参数做出了修改);

注意
有些功能号参数只能浏览,不能修改;
部分参数仅允许在停机状态下进行设定;
一般来说断电后参数设置仍会保存;
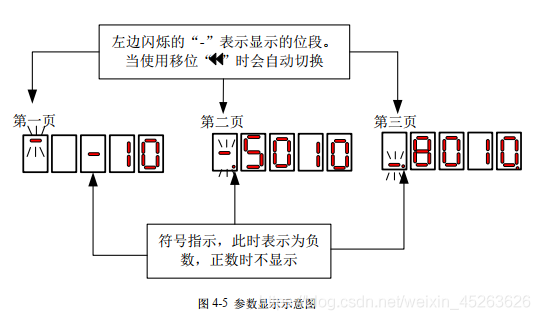
5.3 面板的特殊显示
六位以上参数的设定
设定参数为六位以上时将超出五位数码管的显示范围,此系统将采用最多分4位X3页的显示方法,使用移位键切换页面,其他操作不变:
5.5 参数与功能
通常有以下几类参数组:
P00-xx 表示电机及驱动器参数
P01-xx 主控制参数
P02-xx 表示增益类参数
P03-xx 表示位置参数
P04-xx 表示速度参数
P05-xx 表示转矩参数
P06-xx 表示 I/O 参数
P08-xx 表示高级功能参数
一些参数在设置后立即生效,一些参数则需重新上电。
使用上位机控制伺服电机前伺服驱动器所需进行的配置
与步进电机不同,若要使用上位机控制伺服电机,除了伺服电机、伺服驱动器和上位机之间的接线以及上位机的程序配置,还需要实现对伺服驱动器进行配置。
下列为一般需要设置的参数:

监视组参数
在监视模式下,可对输入到伺服驱动器的指令值、输入输出信号的状态以及伺服的内部状态进行监视;伺服电机处于运行状态时,也能对监视项进行变更。
下图为部分显示参数


IO参数
此处列举输入端口:


DI/DO端子状态显示方法

6 基本控制&伺服运行的一般过程
接通电源
接通控制回路(L1C、L2C)以及主回路(R、S、T)电源;
禁用正向/反向运转禁止极限信号(部分机型)
一些机型(例如台达)在正确接线的情况下上电,在没有任何操作的情况下会直接报错,异警名称为紧急停止。这是因为出厂值的数字输入(DI6 ~ DI8)为反向运转禁止极限(NL)与正向运转禁止极限(PL)与紧急停止(EMGS)信号,若不使用出厂值的数字输入(DI6 ~ DI8),需调整数字输入(DI)之参数 P2-15 ~ P2-17 的设定,可将参数设定为 0(Disable 此 DI 的功能)或修改成其他功能定义。
点动运行(试运行)
点动运行可以用来在初次运行时确认伺服电机是否可以正常运行(此时应断开连接),是否有异响。有面板点动和DI点动两种配置方式。
面板点动/JOG操作
通过面板操作功能码P11.00进入JOG状态,此时面板显示200rpm点动速度默认值,可调整运行速度;按SET进入点动状态,面板显示“JOG”,可调整运行方向:

按MODE键退出点动运行模式时,之前设置的点动运行速度值不保存。
DI点动

DI点动不受伺服控制模式影响,在任何控制模式下,均可以进行DI点动。
基本控制参数配置

上位机控制伺服电机运行
首先需要配置使能信号,可配置为外部使能或软件内部强制使能。
伺服停止
停机方式可分为自由停机、零速停机;停机状态可分为自由运行状态、位置保持锁定;

根据伺服停机情况又可分为伺服使能停机、故障停机(第一类【NO.1】故障、第二类【NO.2】故障)、超程停机和紧急停机。
超程停机:当机械的运动部分超出安全移动范围时,限位开关输出电平变化,伺服驱动器使伺服电机强制停止的安全功能。
故障可分为:
不可复位NO.1故障、可复位NO.1故障、可复位NO.1故障
可复位表示故障处理后可通过设置清除伺服故障状态;不可复位表示故障处理后需重新上电。
限于篇幅这里展示最常用的伺服使能(S-ON)OFF停机:

7 自动增益的配置
并非所有机型都具备自动增益调整功能。
伺服的增益调整分为手动、自动和半自动,自动增益调整指惯量持续估测,惯量将定期调整,自动设定的参数包括电机负载惯量比、位置控制增益、速度控制增益、速度积分补偿、共振抑制低通滤波、外部干扰抵抗增益和速度检测滤波及微振抑制等(不同机型有所不同),此外使用者需自行调整自动调整模式应答性设定值(应答等级);半自动增益调整指惯量非持续估测,运转一段时间后惯量停止调整,使用者需自行调整半自动调整模式应答性设定值(应答等级),通常与自动调整模式应答性设定值为同一参数。
自动及半自动模式下,应答等级设定:
1~50Hz:低刚性,低响应。
51~250Hz:中刚性,中响应。
251~550Hz:高刚性,高响应。
通过增加应答等级来增加响应速度,或降低刚性设定值来减少噪音,持续调整至性能满意,调机完成。
使用自动增益调整(自动调节)功能足以应付大多数负载条件。调整参数时,可以先使用自动参数调整功能,然后根据需要手动调整参数,通常由自动模式或半自动模式切换为手动模式时,相应的参数值也会重新修改成自动/半自动模式下相对应的参数值。
如何理解伺服电机的刚性和惯量?https://www.sohu.com/a/219096822_754529
8 电磁刹车
通常电磁刹车运用在 Z 轴方向,因为 Z 轴方向需要有一个向上的力去避免机构往下掉。使用电磁刹车可以降低伺服电机持续出很大的抗力,若伺服持续出力会则会产生大量的热量,进而导致电机寿命降低。电磁刹车在本装置为了不必要误动作,电磁刹车必须作用在伺服关闭后。
伺服电机内建刹车皆为保持刹车,不可直接使用于停止电机运转。请注意:保持刹车并非可确保机械安全的停止装置,请于机器端安装一个安全停止机械装置。刹车器在保持状态下,仍会有转动背隙,最大转动背隙角度为 1 ~ 2 度。另外附刹车的电机机种运转时,刹车来令片有时会产生声音(沙沙、喀喀声等),这是刹车模块结构造成的,并非有故障不良的情形,并不会影响电机功能。
电磁刹车的接线
刹车信号控制电磁阀吸磁,提供制动器电源,制动器将打开。刹车线圈无极性之分。
禁止将刹车用电源和控制信号电源(VDD)共同使用,这是因为抱闸励磁是高感性元件,启停过程中对供电部分有很大影响,如果共用可能造成逻辑供电不稳进而产生错误。

图中与直流继电器反向并联的二极管为续流二极管。续流二极管通常和储能元件(如继电器内部电感线圈)一起使用,其作用是防止电路中电压电流的突变,为反向电动势提供耗电通路。继电器模块一般带有续流二极管(单个继电器没有)。
9 扭矩模式、速度模式和混合模式
9.1 扭矩模式
扭矩控制模式(T 或 Tz)被应用于需要做扭力控制的场合,设定好一个固定的转矩后,当负载小于电机转矩,电机会一直加速至最大速度。
伺服驱动器通常有两种命令输入模式:模拟输入及缓存器输入。
模拟命令输入可经由外界来的电压来操纵电机的扭矩。
缓存器输入可通过配置相关参数作为扭矩命令。
在扭矩模式下,可以使用速度限制指令。
转矩模式下,转速是自由的(随负载变)。
9.2 速度模式
速度控制模式(S 或 Sz)被应用于精密控速的场合,例如 CNC 加工机。
伺服驱动器通常有两种命令输入模式:模拟输入及缓存器输入。
模拟命令输入可经由外界来的电压来操纵电机的转速。
命令缓存器输入有两种应用方式:
1)第一种为使用者在作动前,先将不同速度命令值设于三个命令缓存器,再通过 DI 来进行切换;
2)第二种为利用通讯方式来改变命令缓存器的内容值。为了命令缓存器切换产生的不连续,部分伺服也提供完整 S 型曲线规划。在闭
回路系统中,这些装置采用增益及累加整合型式(PI)控制器。同时二种操纵模式(手动、自动)也提供使用者来选择。
转速控制模式下,转矩是自由的(随负载变)。
9.3 混合模式
混合模式是由两种单一模式(位置、速度、扭矩控制)组成的操作模式,通过外部DI信号决定在混合模式中的哪一种单一模式下运行,即混合模式并非指可以同时在两种模式下运行,而是给予了用户切换控制模式的权力。
教学平台
伺服驱动器必须与电机相匹配。
伺服驱动器型号:YAKOTEC ES2-10BFI
伺服电机型号:YAKOTEC ASMJ-0B-0830B-U321
此处为样图,其展示型号与笔者所用型号有差异。
从基本理论上讲,微特电机与普通电机没有本质区别,其主要作用是完成控制信号的传递和转换,注重高精度和快速响应。微特电机分为驱动微电机和控制电机,驱动微电机在电力拖动系统中作为执行机构使用,伺服电机即为驱动微电机。
1 伺服系统配件与安装
1.1 配套线缆
电机动力线
电机编码器线
PE线即地线。
**注意:**请不要将动力线和信号线、编码器线从同一管道内穿过,也不要将其绑扎在一起。配线时,请使动力线、编码器线和信号线相隔 30 厘米(11.8 英寸)以上,以防止电压耦合及避免噪声。
对于信号线、编码器反馈线,请使用多股绞合线以及多芯绞合整体屏蔽线。对于配线长度,信号输入线最长为 3 米(9.84 英尺),反馈线最长为 20 米 (65.62 英尺)。
1.2 伺服器的安装与散热
通常采用垂直向上安装的方式,伺服器下方为进风口,上方为出风口。通电后不要触摸散热器,否则可能导致烫伤。
1.3 联轴器的安装
建议使用专为伺服电机设计的挠性联轴器,尤其是使用双弹簧联轴器,其在偏心和偏转时可以提供一些公差缓冲的裕度。请针对操作条件选择合适的联轴器尺寸,不适当的使用或连接可能会导致损坏。
使用时须将电机轴端的防锈涂层或油质擦掉。
2 伺服驱动器与伺服电机连接
伺服系统总体结构图如下:
2.1 主回路
在单相AC电源输入中,R相当于(电源插头中的)L,S相当于N,但实际上由于交流电没有正负的原因,无论怎么接设备都可以正常运作。
关于接地:实际上设备不接地也可以正常工作,但是在这种情况下,设备漏电将导致设备外壳带电,会引发触电风险;不过只要接入漏保,一旦线路中的漏电电流超过漏保的动作电流,它就会跳闸。在有漏保的情况下设备是否接地,其区别在于,接地时若设备漏电且超过动作电流,则漏保将自动断开;未接地时若设备漏电,漏保通常在人接触金属壳体后才会断开(此时可能造成危险;若电流不大甚至不会动作)。
3 漏电开关有接地和没接地的区别
伺服电机与普通电机不同,故接线连反也不会改变旋转方向,但若连接线顺序错误,马达就不会旋转;通常也不存在星形和三角形接线。
要点: 主回路电源输入端子(RST)支持单相或三相AC220V电源输入(不一定所有伺服驱动器都支持单相和三相电);在不接再生电阻连接端子时,默认P+与D短接;单机无需进行共母线连接(P+、○);
即使关闭电源,伺服驱动器内部仍可能会滞留高电源,请暂时(10 分钟)不要触摸电源端子。并请确认“CHARGE”指示灯熄灭后,再进行检查作业。
再生电阻的连接与设置
关于再生电阻和制动电阻
从功能方面说,两者不是一类电阻。
制动电阻主要就是在变频器带动的电机需要停车时,采用能耗制动方式,把停机后的动能和线圈中的磁能,通过一个制动电阻消耗掉,从而达到保护变频器的作用。
再生电阻则是当伺服电机模式驱动时,再生电力回归到伺服放大器测,这部分电力首先通过平滑电容器的充电来吸收,超出可充电能量后,再用一个电阻器来消耗。这就是再生电阻器的由来。
电阻器从材质上分类,两者可一样,可不一样的。在一般情况下,两者都采用网状不锈钢电阻器。
接通控制回路电源和主回路电源后,母线电压指示灯显示无异常,且面板显示器显示“rdy”,表明伺服驱动器处于可运行的状态,等待上位机给出伺服使能信号。
3.1 控制信号CN1
伺服电机可以接收模拟信号、脉冲信号和总线通信信号。
用于连接上位控制器,进行IO信号控制,所有的输入和输出信号都经此接口出入驱动器。
由于CN1控制端子定义较多,此处只展示常用端子:
并非所有引脚都会用到,具体用到哪些引脚可参考下一节【伺服信号线】。伺服驱动器在不同引脚有相同的名称时,表示在驱动器内部时相互连接。
伺服驱动器的位置给定(伺服定位)有3种方法:
一种是用脉冲和方向信号共同控制,即脉冲数控制位移,方向信号控制正反转;
第二种是正转脉冲CCW和反转脉冲CW输入控制;
第三种是90°相位A/B两相脉冲输入。
这3种方法中第一种最为常用,因而需要接入PULS端子和SIGN端子(这两类端子被称作低速脉冲端,因此还存在高速脉冲端);为了形成闭环控制还需接入编码器输出信号,通常接入AB相信号即PAO端子和PBO端子;千万注意不要忘记接入使能ON信号,此外通常还需要接24V和COM端子。
差分传输
差分传输是一种信号传输的技术,区别于传统的一根信号线一根地线的做法,差分传输在这两根线上都传输信号,这两个信号的振幅相同,相位相反。在这两根线上的传输的信号就是差分信号。信号接收端比较这两个电压的差值来判断发送端发送的逻辑状态。
差分输出与单端输出
差分输出有两个输出端,输出的信号是两输出端之间的电压差;单端输出只有一个输出端,输出地信号是输出端对地的电压。
伺服信号线
通常不会配送伺服信号线,只会配未组装的通讯头,接线由用户设计并完成线与通信头的焊接:
以位置控制模式为例,配线可参考用户手册中的“位置控制模式配线”并结合上述所列伺服驱动器端口定义:
此符号代表驱动信号输入端。
此符号代表双绞线。
使能ON
只有当产生使能ON信号时,才可对电机进行控制(此时表现为无法转动电机轴,即通电自锁;并伴随噪音)。
使能ON信号可由内部产生或从外部接入(通常需要设置使能信号的来源)。在进行外部控制时如果没有接入使能信号,那么电机将不会转动。
注意上图中的伺服使能S-ON信号输入端口为DI1,一些伺服驱动器的IO口可以对其进行功能选择,即图中的DI1-DI8任意端口都可设置为使能ON信号输入端口。
外部信号的输入顺序
首先接入电源,等待伺服驱动器开机并完成初始化(听到继电器响声);接入使能ON信号;接入脉冲+方向信号。
这是一个标准的外部信号输入顺序,但实际上同时接入并不会影响伺服驱动器的正常工作,但不能确保这样是否会对机器造成损伤。
3.2 编码器接口CN2
关于编码器的A、B、Z相
编码器是测量速度、位移、旋转位置的设备,把角度位移或直线位移转换成电信号,以通讯方式传送给控制器。编码器分为增量式和绝对式两种。A相、B相、Z相旋转输出脉冲电压,三相脉冲各自独立,A相和B相脉冲量相等,但是A相和B相之间存在一个90°(电气角的一周期为360°)的电气角相位差,可以根据这个相位差来判断编码器旋转的方向是正转还是反转,正转时,A相超前B相90°先进行相位输出,反转时,B相超前A相90°先进行相位输出。Z相为一圈一个脉冲电压。
3.3 Mini USB通讯CN5
通过CN5,可以建立PC和驱动器的通讯,实行对驱动器状态监控、测试运行、参数读写等操作。
一些伺服驱动器支持网口通讯。
此端口很少用到。
4 上位机程序配置与接线
通常使用PLC作为上位机,由于我并没有通过PLC控制伺服电机,因此只会进行一个简单的概述。
使用上位机控制伺服电机所需完成的工作:
5 面板显示与参数配置
不同型号的伺服电机显示略有差异,不具备普适性,此处仅做参考。
注意:下列图片摘抄自研控和杰美康手册,并非单一手册。
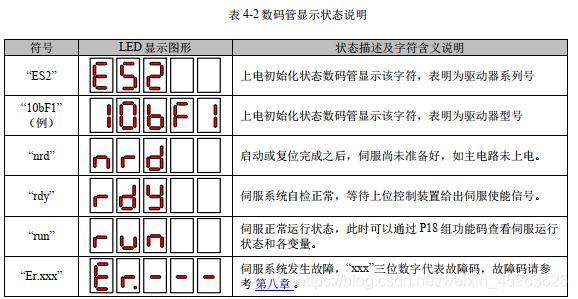
5.1 伺服驱动器的基本运行状态显示
状态显示分为位数据和缩略符号:
位数据:
缩略符号:
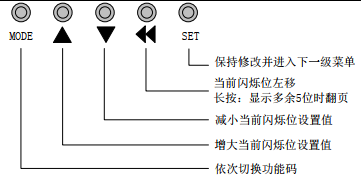
5.2 面板操作
键位
操作面板5个按键功能如下图所示:
操作模式及其切换
伺服驱动器共有四种功能模式,分别为状态显示模式、监控模式、参数设置模式、辅助模式,它们之间的切换流程如下:
子菜单设置
按MODE键可以进入0级菜单(Pxx三位显示,表示功能码的Pxx组)切换功能码组(再按一次MODE键返回且不保存数据,下同),可通过上下三角键修改闪烁位,按移位键可移动闪烁位,便于设置为所需的组号;
组号设定完成后按SET键进入I级菜单(Pxx.xx五位显示,表示功能码序号)设置所需要的功能码序号;
功能码序号设定完成后按SET键进入II级菜单进行该功能码的参数修改(如果该参数允许修改,其最低位会闪烁显示);
功能码的参数修改完成并按SET成功保存后,将显示DONE(若对参数做出了修改);
注意
有些功能号参数只能浏览,不能修改;
部分参数仅允许在停机状态下进行设定;
一般来说断电后参数设置仍会保存;
5.3 面板的特殊显示
六位以上参数的设定
设定参数为六位以上时将超出五位数码管的显示范围,此系统将采用最多分4位X3页的显示方法,使用移位键切换页面,其他操作不变:
5.5 参数与功能
通常有以下几类参数组:
P00-xx 表示电机及驱动器参数
P01-xx 主控制参数
P02-xx 表示增益类参数
P03-xx 表示位置参数
P04-xx 表示速度参数
P05-xx 表示转矩参数
P06-xx 表示 I/O 参数
P08-xx 表示高级功能参数
一些参数在设置后立即生效,一些参数则需重新上电。
使用上位机控制伺服电机前伺服驱动器所需进行的配置
与步进电机不同,若要使用上位机控制伺服电机,除了伺服电机、伺服驱动器和上位机之间的接线以及上位机的程序配置,还需要实现对伺服驱动器进行配置。
下列为一般需要设置的参数:
监视组参数
在监视模式下,可对输入到伺服驱动器的指令值、输入输出信号的状态以及伺服的内部状态进行监视;伺服电机处于运行状态时,也能对监视项进行变更。
下图为部分显示参数
IO参数
此处列举输入端口:
DI/DO端子状态显示方法
6 基本控制&伺服运行的一般过程
接通电源
接通控制回路(L1C、L2C)以及主回路(R、S、T)电源;
禁用正向/反向运转禁止极限信号(部分机型)
一些机型(例如台达)在正确接线的情况下上电,在没有任何操作的情况下会直接报错,异警名称为紧急停止。这是因为出厂值的数字输入(DI6 ~ DI8)为反向运转禁止极限(NL)与正向运转禁止极限(PL)与紧急停止(EMGS)信号,若不使用出厂值的数字输入(DI6 ~ DI8),需调整数字输入(DI)之参数 P2-15 ~ P2-17 的设定,可将参数设定为 0(Disable 此 DI 的功能)或修改成其他功能定义。
点动运行(试运行)
点动运行可以用来在初次运行时确认伺服电机是否可以正常运行(此时应断开连接),是否有异响。有面板点动和DI点动两种配置方式。
面板点动/JOG操作
通过面板操作功能码P11.00进入JOG状态,此时面板显示200rpm点动速度默认值,可调整运行速度;按SET进入点动状态,面板显示“JOG”,可调整运行方向:
按MODE键退出点动运行模式时,之前设置的点动运行速度值不保存。
DI点动
DI点动不受伺服控制模式影响,在任何控制模式下,均可以进行DI点动。
基本控制参数配置
上位机控制伺服电机运行
首先需要配置使能信号,可配置为外部使能或软件内部强制使能。
伺服停止
停机方式可分为自由停机、零速停机;停机状态可分为自由运行状态、位置保持锁定;
根据伺服停机情况又可分为伺服使能停机、故障停机(第一类【NO.1】故障、第二类【NO.2】故障)、超程停机和紧急停机。
超程停机:当机械的运动部分超出安全移动范围时,限位开关输出电平变化,伺服驱动器使伺服电机强制停止的安全功能。
故障可分为:
不可复位NO.1故障、可复位NO.1故障、可复位NO.1故障
可复位表示故障处理后可通过设置清除伺服故障状态;不可复位表示故障处理后需重新上电。
限于篇幅这里展示最常用的伺服使能(S-ON)OFF停机:
7 自动增益的配置
并非所有机型都具备自动增益调整功能。
伺服的增益调整分为手动、自动和半自动,自动增益调整指惯量持续估测,惯量将定期调整,自动设定的参数包括电机负载惯量比、位置控制增益、速度控制增益、速度积分补偿、共振抑制低通滤波、外部干扰抵抗增益和速度检测滤波及微振抑制等(不同机型有所不同),此外使用者需自行调整自动调整模式应答性设定值(应答等级);半自动增益调整指惯量非持续估测,运转一段时间后惯量停止调整,使用者需自行调整半自动调整模式应答性设定值(应答等级),通常与自动调整模式应答性设定值为同一参数。
自动及半自动模式下,应答等级设定:
1~50Hz:低刚性,低响应。
51~250Hz:中刚性,中响应。
251~550Hz:高刚性,高响应。
通过增加应答等级来增加响应速度,或降低刚性设定值来减少噪音,持续调整至性能满意,调机完成。
使用自动增益调整(自动调节)功能足以应付大多数负载条件。调整参数时,可以先使用自动参数调整功能,然后根据需要手动调整参数,通常由自动模式或半自动模式切换为手动模式时,相应的参数值也会重新修改成自动/半自动模式下相对应的参数值。
如何理解伺服电机的刚性和惯量?https://www.sohu.com/a/219096822_754529
8 电磁刹车
通常电磁刹车运用在 Z 轴方向,因为 Z 轴方向需要有一个向上的力去避免机构往下掉。使用电磁刹车可以降低伺服电机持续出很大的抗力,若伺服持续出力会则会产生大量的热量,进而导致电机寿命降低。电磁刹车在本装置为了不必要误动作,电磁刹车必须作用在伺服关闭后。
伺服电机内建刹车皆为保持刹车,不可直接使用于停止电机运转。请注意:保持刹车并非可确保机械安全的停止装置,请于机器端安装一个安全停止机械装置。刹车器在保持状态下,仍会有转动背隙,最大转动背隙角度为 1 ~ 2 度。另外附刹车的电机机种运转时,刹车来令片有时会产生声音(沙沙、喀喀声等),这是刹车模块结构造成的,并非有故障不良的情形,并不会影响电机功能。
电磁刹车的接线
刹车信号控制电磁阀吸磁,提供制动器电源,制动器将打开。刹车线圈无极性之分。
禁止将刹车用电源和控制信号电源(VDD)共同使用,这是因为抱闸励磁是高感性元件,启停过程中对供电部分有很大影响,如果共用可能造成逻辑供电不稳进而产生错误。
图中与直流继电器反向并联的二极管为续流二极管。续流二极管通常和储能元件(如继电器内部电感线圈)一起使用,其作用是防止电路中电压电流的突变,为反向电动势提供耗电通路。继电器模块一般带有续流二极管(单个继电器没有)。
9 扭矩模式、速度模式和混合模式
9.1 扭矩模式
扭矩控制模式(T 或 Tz)被应用于需要做扭力控制的场合,设定好一个固定的转矩后,当负载小于电机转矩,电机会一直加速至最大速度。
伺服驱动器通常有两种命令输入模式:模拟输入及缓存器输入。
模拟命令输入可经由外界来的电压来操纵电机的扭矩。
缓存器输入可通过配置相关参数作为扭矩命令。
在扭矩模式下,可以使用速度限制指令。
转矩模式下,转速是自由的(随负载变)。
9.2 速度模式
速度控制模式(S 或 Sz)被应用于精密控速的场合,例如 CNC 加工机。
伺服驱动器通常有两种命令输入模式:模拟输入及缓存器输入。
模拟命令输入可经由外界来的电压来操纵电机的转速。
命令缓存器输入有两种应用方式:
1)第一种为使用者在作动前,先将不同速度命令值设于三个命令缓存器,再通过 DI 来进行切换;
2)第二种为利用通讯方式来改变命令缓存器的内容值。为了命令缓存器切换产生的不连续,部分伺服也提供完整 S 型曲线规划。在闭
回路系统中,这些装置采用增益及累加整合型式(PI)控制器。同时二种操纵模式(手动、自动)也提供使用者来选择。
转速控制模式下,转矩是自由的(随负载变)。
9.3 混合模式
混合模式是由两种单一模式(位置、速度、扭矩控制)组成的操作模式,通过外部DI信号决定在混合模式中的哪一种单一模式下运行,即混合模式并非指可以同时在两种模式下运行,而是给予了用户切换控制模式的权力。

 举报
举报




