由于传感器种类和安装方式的不同,SLAM 的实现方式和难度会有一定的差异。按传感器来分,SLAM 主要分为激光 SLAM 和 VSLAM 两大类。其中,激光 SLAM 比 VSLAM 起步早,在理论、技术和产品落地上都相对成熟。基于视觉的 SLAM 方案目前主要有两种实现路径,一种是基于 RGBD 的深度摄像机,比如 Kinect;还有一种就是基于单目、双目或者鱼眼摄像头的。VSLAM 目前尚处于进一步研发和应用场景拓展、产品逐渐落地阶段。
激光 SLAM:早在 2005 年的时候,激光 SLAM 就已经被研究的比较透彻,框架也已初步确定。激光 SLAM,是目前最稳定、最主流的定位导航方。
激光 SLAM 地图构建
VSLAM(基于视觉的定位与建图):随着计算机视觉的迅速发展,视觉 SLAM 因为信息量大,适用范围广等优点受到广泛关注。
(1)基于深度摄像机的 Vslam,跟激光 SLAM 类似,通过收集到的点云数据,能直接计算障碍物距离;
(2)基于单目、鱼眼相机的 VSLAM 方案,利用多帧图像来估计自身的位姿变化,再通过累计位姿变化来计算距离物体的距离,并进行定位与地图构建;
视觉 SLAM 地图构建,图片来源:百度 AI
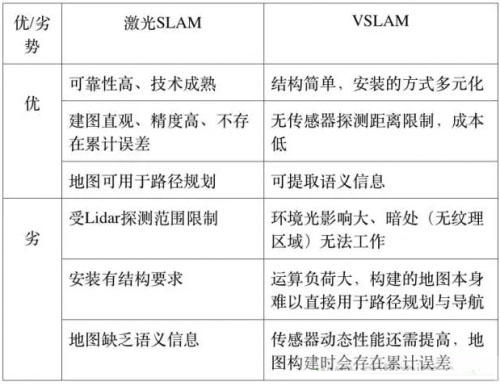
一直以来,不管是产业界还是学术界,对激光 SLAM 和 VSLAM 到底谁更胜一筹,谁是未来的主流趋势这一问题,都有自己的看法和见解。下面就简单从几个方面对比了一下激光 SLAM 和 VSLAM。
其他 除了上面几点之外,在探测范围、运算强度、实时数据生成、地图累计误差等方面,激光 SLAM 和视觉 SLAM 也会存在一定的差距。 比如:
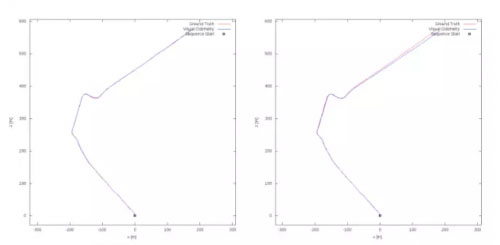
注:左为 Lidar SLAM,右为 VSLAM,数据来源:KITTI 可以明显看出,对于同一个场景,VSLAM 在后半程中出现了偏差,这是因为累积误差所引起的,所以 VSLAM 要进行回环检验。
激光 SLAM 是目前比较成熟的定位导航方案,视觉 SLAM 是未来研究的一个主流方向。所以,未来,多传感器的融合是一种必然的趋势。取长补短,优势结合,为市场打造出真正好用的、易用的 SLAM 方案。
由于传感器种类和安装方式的不同,SLAM 的实现方式和难度会有一定的差异。按传感器来分,SLAM 主要分为激光 SLAM 和 VSLAM 两大类。其中,激光 SLAM 比 VSLAM 起步早,在理论、技术和产品落地上都相对成熟。基于视觉的 SLAM 方案目前主要有两种实现路径,一种是基于 RGBD 的深度摄像机,比如 Kinect;还有一种就是基于单目、双目或者鱼眼摄像头的。VSLAM 目前尚处于进一步研发和应用场景拓展、产品逐渐落地阶段。
激光 SLAM:早在 2005 年的时候,激光 SLAM 就已经被研究的比较透彻,框架也已初步确定。激光 SLAM,是目前最稳定、最主流的定位导航方。
激光 SLAM 地图构建
VSLAM(基于视觉的定位与建图):随着计算机视觉的迅速发展,视觉 SLAM 因为信息量大,适用范围广等优点受到广泛关注。
(1)基于深度摄像机的 Vslam,跟激光 SLAM 类似,通过收集到的点云数据,能直接计算障碍物距离;
(2)基于单目、鱼眼相机的 VSLAM 方案,利用多帧图像来估计自身的位姿变化,再通过累计位姿变化来计算距离物体的距离,并进行定位与地图构建;
视觉 SLAM 地图构建,图片来源:百度 AI
一直以来,不管是产业界还是学术界,对激光 SLAM 和 VSLAM 到底谁更胜一筹,谁是未来的主流趋势这一问题,都有自己的看法和见解。下面就简单从几个方面对比了一下激光 SLAM 和 VSLAM。
其他 除了上面几点之外,在探测范围、运算强度、实时数据生成、地图累计误差等方面,激光 SLAM 和视觉 SLAM 也会存在一定的差距。 比如:
注:左为 Lidar SLAM,右为 VSLAM,数据来源:KITTI 可以明显看出,对于同一个场景,VSLAM 在后半程中出现了偏差,这是因为累积误差所引起的,所以 VSLAM 要进行回环检验。
激光 SLAM 是目前比较成熟的定位导航方案,视觉 SLAM 是未来研究的一个主流方向。所以,未来,多传感器的融合是一种必然的趋势。取长补短,优势结合,为市场打造出真正好用的、易用的 SLAM 方案。
由于传感器种类和安装方式的不同,SLAM 的实现方式和难度会有一定的差异。按传感器来分,SLAM 主要分为激光 SLAM 和 VSLAM 两大类。其中,激光 SLAM 比 VSLAM 起步早,在理论、技术和产品落地上都相对成熟。基于视觉的 SLAM 方案目前主要有两种实现路径,一种是基于 RGBD 的深度摄像机,比如 Kinect;还有一种就是基于单目、双目或者鱼眼摄像头的。VSLAM 目前尚处于进一步研发和应用场景拓展、产品逐渐落地阶段。
激光 SLAM:早在 2005 年的时候,激光 SLAM 就已经被研究的比较透彻,框架也已初步确定。激光 SLAM,是目前最稳定、最主流的定位导航方。
激光 SLAM 地图构建
VSLAM(基于视觉的定位与建图):随着计算机视觉的迅速发展,视觉 SLAM 因为信息量大,适用范围广等优点受到广泛关注。
(1)基于深度摄像机的 Vslam,跟激光 SLAM 类似,通过收集到的点云数据,能直接计算障碍物距离;
(2)基于单目、鱼眼相机的 VSLAM 方案,利用多帧图像来估计自身的位姿变化,再通过累计位姿变化来计算距离物体的距离,并进行定位与地图构建;
视觉 SLAM 地图构建,图片来源:百度 AI
一直以来,不管是产业界还是学术界,对激光 SLAM 和 VSLAM 到底谁更胜一筹,谁是未来的主流趋势这一问题,都有自己的看法和见解。下面就简单从几个方面对比了一下激光 SLAM 和 VSLAM。
其他 除了上面几点之外,在探测范围、运算强度、实时数据生成、地图累计误差等方面,激光 SLAM 和视觉 SLAM 也会存在一定的差距。 比如:
注:左为 Lidar SLAM,右为 VSLAM,数据来源:KITTI 可以明显看出,对于同一个场景,VSLAM 在后半程中出现了偏差,这是因为累积误差所引起的,所以 VSLAM 要进行回环检验。
激光 SLAM 是目前比较成熟的定位导航方案,视觉 SLAM 是未来研究的一个主流方向。所以,未来,多传感器的融合是一种必然的趋势。取长补短,优势结合,为市场打造出真正好用的、易用的 SLAM 方案。
由于传感器种类和安装方式的不同,SLAM 的实现方式和难度会有一定的差异。按传感器来分,SLAM 主要分为激光 SLAM 和 VSLAM 两大类。其中,激光 SLAM 比 VSLAM 起步早,在理论、技术和产品落地上都相对成熟。基于视觉的 SLAM 方案目前主要有两种实现路径,一种是基于 RGBD 的深度摄像机,比如 Kinect;还有一种就是基于单目、双目或者鱼眼摄像头的。VSLAM 目前尚处于进一步研发和应用场景拓展、产品逐渐落地阶段。
激光 SLAM:早在 2005 年的时候,激光 SLAM 就已经被研究的比较透彻,框架也已初步确定。激光 SLAM,是目前最稳定、最主流的定位导航方。
激光 SLAM 地图构建
VSLAM(基于视觉的定位与建图):随着计算机视觉的迅速发展,视觉 SLAM 因为信息量大,适用范围广等优点受到广泛关注。
(1)基于深度摄像机的 Vslam,跟激光 SLAM 类似,通过收集到的点云数据,能直接计算障碍物距离;
(2)基于单目、鱼眼相机的 VSLAM 方案,利用多帧图像来估计自身的位姿变化,再通过累计位姿变化来计算距离物体的距离,并进行定位与地图构建;
视觉 SLAM 地图构建,图片来源:百度 AI
一直以来,不管是产业界还是学术界,对激光 SLAM 和 VSLAM 到底谁更胜一筹,谁是未来的主流趋势这一问题,都有自己的看法和见解。下面就简单从几个方面对比了一下激光 SLAM 和 VSLAM。
其他 除了上面几点之外,在探测范围、运算强度、实时数据生成、地图累计误差等方面,激光 SLAM 和视觉 SLAM 也会存在一定的差距。 比如:
注:左为 Lidar SLAM,右为 VSLAM,数据来源:KITTI 可以明显看出,对于同一个场景,VSLAM 在后半程中出现了偏差,这是因为累积误差所引起的,所以 VSLAM 要进行回环检验。
激光 SLAM 是目前比较成熟的定位导航方案,视觉 SLAM 是未来研究的一个主流方向。所以,未来,多传感器的融合是一种必然的趋势。取长补短,优势结合,为市场打造出真正好用的、易用的 SLAM 方案。



 举报
举报



