
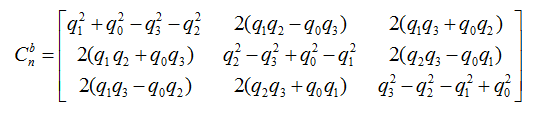
void IMUupdate(float gx, float gy, float gz, float ax, float ay, float az) { float norm; float vx, vy, vz; float ex, ey, ez; norm = sqrt(ax*ax + ay*ay + az*az); ax = ax / norm; ay = ay / norm; az = az / norm; 下面把四元数换算成方向余弦中的第三行的三个元素。刚好vx,vy,vz 其实就是上一次的欧拉角(四元数)的机体坐标参考系换算出来的重力的单位向量。
// estimated direction of gravity vx = 2*(q1*q3 - q0*q2); vy = 2*(q0*q1 + q2*q3); vz = q0*q0 - q1*q1 - q2*q2 + q3*q3; axyz是机体坐标参照系上,加速度计测出来的重力向量,也就是实际测出来的重力向量。
axyz是测量得到的重力向量,vxyz是陀螺积分后的姿态来推算出的重力向量,它们都是机体坐标参照系上的重力向量。
那它们之间的误差向量,就是陀螺积分后的姿态和加计测出来的姿态之间的误差。
向量间的误差,可以用向量叉积(也叫向量外积、叉乘)来表示,exyz就是两个重力向量的叉积。
这个叉积向量仍旧是位于机体坐标系上的,而陀螺积分误差也是在机体坐标系,而且叉积的大小与陀螺积分误差成正比,正好拿来纠正陀螺。(你可以自己拿东西想象一下)由于陀螺是对机体直接积分,所以对陀螺的纠正量会直接体现在对机体坐标系的纠正。
// integral error scaled integral gain exInt = exInt + ex*Ki; eyInt = eyInt + ey*Ki; ezInt = ezInt + ez*Ki; 用叉积误差来做PI修正陀螺零偏
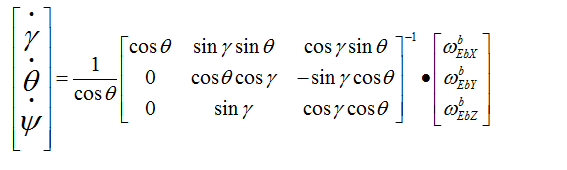
// integral error scaled integral gain exInt = exInt + ex*Ki; eyInt = eyInt + ey*Ki; ezInt = ezInt + ez*Ki; // adjusted gyroscope measurements gx = gx + Kp*ex + exInt; gy = gy + Kp*ey + eyInt; gz = gz + Kp*ez + ezInt; 四元数微分方程,其中T为测量周期,为陀螺仪角速度,以下都是已知量,这里使用了一阶龙哥库塔求解四元数微分方程:
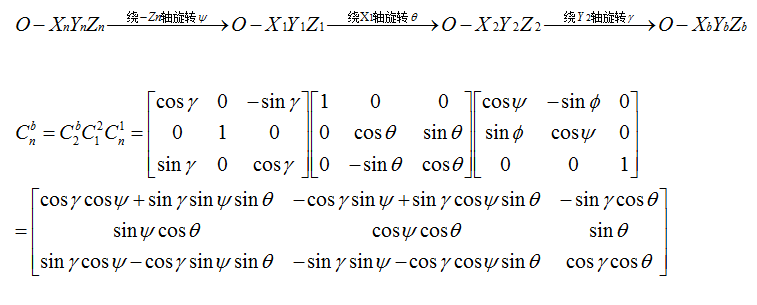
// integrate quaternion rate and normalise q0 = q0 + (-q1*gx - q2*gy - q3*gz)*halfT; q1 = q1 + (q0*gx + q2*gz - q3*gy)*halfT; q2 = q2 + (q0*gy - q1*gz + q3*gx)*halfT; q3 = q3 + (q0*gz + q1*gy - q2*gx)*halfT; 最后根据四元数方向余弦阵和欧拉角的转换关系,把四元数转换成欧拉角:
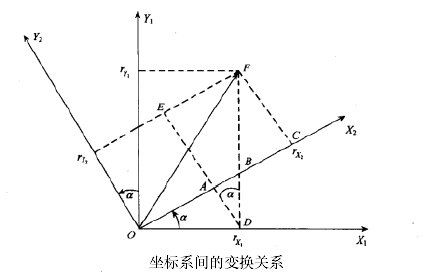
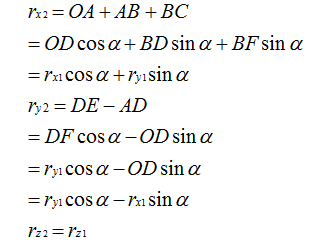
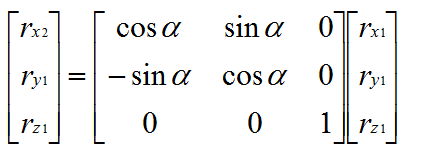
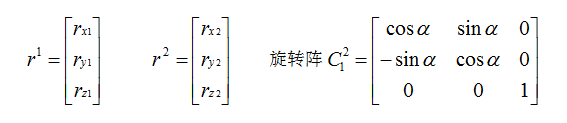
所以有:
Q_ANGLE.Yaw = atan2(2 * q1 * q2 + 2 * q0 * q3, -2 * q2*q2 - 2 * q3* q3 + 1)* 57.3; // yaw Q_ANGLE.Y = asin(-2 * q1 * q3 + 2 * q0* q2)* 57.3; // pitch Q_ANGLE.X = atan2(2 * q2 * q3 + 2 * q0 * q1, -2 * q1 * q1 - 2 * q2* q2 + 1)* 57.3; // roll
更多回帖

