2.4 图像调整
2.4.1 图像的缩放
2.4.1.1 图像缩放算法浅析
图像缩放算法有很多种,这里参考网友"lantianyu520"所著的"图像缩放算法"。
原理浅析
要理解这个图像缩放算法的原理,最重要的是需要理解:对于图像上的每一个像素点,它缩放前后,相对于整个图像的比例应该是一样的。
比如:
以一个长度和宽度分别为200,100的长方形为例,将其放大两倍,那么缩放后的长度和宽度为400,200。
为方便理解,我们建立一个笛卡尔坐标系,把这个长方形左下角的顶点放到坐标(0,0)位置,四个点的坐标分别为:(0,0),(0,100),(200,0),(200,100)。
假设此时对长方形中的坐标点(40,50),它的x坐标相对于长的比值是40/200=0.2,y坐标相对于宽的比值是50/100=0.5,那么该点的变换后的坐标Dx,Dy则应满足:Dx/400 = 5;Dy/200 = 0.5,这样,缩放后的坐标就可以算出来了。
根据上面的分析,设缩放前的像素点坐标为(Sx,Sy),对应的缩放后的像素点坐标为(Dx,Dy),缩放前的图像长宽分别为Sw,Sh,缩放后的图像长宽分别为Dw,Dh,则有:
Sx/Dx = Sw/Dw,Sy/Dy = Sh/Dh
故有Sx = Dx * Sw/Dw,Sy = Dy * Sh/Dh,
2.4.1.2源码编写:图像缩放算法
有了这个上面两条等式后,图像缩放算法的代码就好理解了。
下面的函数实现了基于上述原理实现的图像缩放算法:
代码清单2.4
1.
11. int PicZoom(PT_PictureData ptPicData,float fSize)
12. {
13. ptPicData->iZoomWidth = ptPicData->iWidth * fSize;
14. ptPicData->iZoomHeight= ptPicData->iHeight* fSize;
15. unsigned long* pdwSrcXTable;
16. unsigned long x;
17. unsigned long y;
18. unsigned long dwSrcY;
19. unsigned char *pucDest;
20. unsigned char *pucSrc;
21. unsigned long dwPixelBytes = ptPicData->iBpp/8;
22. ptPicData->pucZoomData= malloc(sizeof(unsigned char) * ptPicData->iZoomWidth*ptPicData->iZoomHeight*ptPicData->iBpp/8);
23. pdwSrcXTable = malloc(sizeof(unsigned long) * ptPicData->iZoomWidth);
24. if (NULL == pdwSrcXTable){
25. printf("malloc error!\n");
26. return -1;
27. }
28.
29.
30. for (x = 0; x < ptPicData->iZoomWidth; x++){
31.
36. pdwSrcXTable[x]=(x*ptPicData->iWidth/ptPicData->iZoomWidth);
37. }
38.
39. for (y = 0; y < ptPicData->iZoomHeight; y++){
40.
45. dwSrcY = (y * ptPicData->iHeight / ptPicData->iZoomHeight);
46.
47. pucDest = ptPicData->pucZoomData + y*ptPicData->iZoomWidth*3;
48. pucSrc = ptPicData->pucRgbData + dwSrcY*ptPicData->iWidth*3;
49.
50.
51. for (x = 0; x <ptPicData->iZoomWidth; x++){
52. memcpy(pucDest+x*dwPixelBytes, pucSrc+pdwSrcXTable[x]*dwPixelBytes, dwPixelBytes);
53. }
54. }
55.
56. free(pdwSrcXTable);
57. return 0;
58. }
2.4.2 图像的旋转
2.4.2.1 图像旋转算法浅析
这里的图像旋转算法原理参考网友"落叶的思维"所著的"图像旋转算法与实现"
原理浅析
这个旋转算法的原理的关键点有两个:
- 原图像是以图像的左下角为原点建立笛卡尔坐标系的,而旋转一般是以图像的中心作为旋转点旋转的。
因此为了便于转换,我们先约定两个坐标系,一个是以图像左下角为原点建立的坐标系,称为坐标系A,这也是原图像的坐标系。一个是以图像中心为原点建立的坐标系,称为坐标系B。
由此,可以知道这个旋转算法的步骤:先将坐标系A下的坐标转换为坐标系B下的坐标,然后在坐标系B下进行图像的旋转。
在坐标系B下,我们假设点(x0,y0)距离原点的距离为r,点与原点之间的连线与x轴的夹角为b,旋转的角度为a,旋转后的点为(x1,y1), 如下图所示。
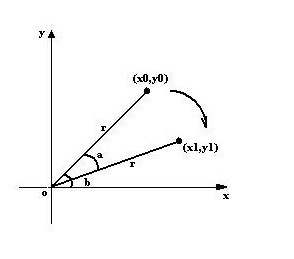
那么有以下结论:
x0=rcosb;y0=rsinb
x1 = rcos(b-a) = rcosbcosa+rsinbsina=x0cosa+y0sina;
y1=rsin(b-a)=rsinbcosa-rcosbsina=-x0sina+y0cosa;
最后,由于我们显示图像的RGB数据还是要在坐标系A下获取的,我们最后只需要将坐标系B下的x1,y1转换回坐标系A下的坐标就可以了。
旋转后的图像的长和宽会发生变化,因此要计算新图像的长和宽。
由几何关系可知,新图像的长和宽分别是旋转后,对角坐标相见后的最大值
2.4.2.2 源码编写:图像旋转算法
代码清单2.5
1. #define PI 3.1415926535
2.
3. #define RADIAN(angle) ((angle)*PI/180.0)
4.
5.
6.
7.
8.
9. typedef struct ConcernCoor {
10. int iLTx;
11. int iLTy;
12. int iLBx;
13. int iLBy;
14. int iRTx;
15. int iRTy;
16. int iRBx;
17. int iRBy;
18. }T_ConcernCoor, *PT_ConcernCoor;
19.
20.
21.
28. static int max(int x,int y){
29. return x>y?x:y;
30. }
31.
41. int PicRotate(PT_PictureData ptPicData,float fAngle)
42. {
43. int i ,j;
44. T_ConcernCoor tConCor,tRonCor;
45.
46.
47. int iSrcLineSize = ptPicData->iBpp* ptPicData->iZoomWidth / 8;
48. int iDesLineSize;
49. int iX;
50. int iY;
51.
52.
56. tConCor.iLTx = -ptPicData->iZoomWidth/2; tConCor.iLTy = ptPicData->iZoomHeight/2;
57. tConCor.iRTx = ptPicData->iZoomWidth/2; tConCor.iRTy = ptPicData->iZoomHeight/2;
58. tConCor.iLBx = -ptPicData->iZoomWidth/2;tConCor.iLBy = -ptPicData->iZoomHeight/2;
59. tConCor.iRBx = ptPicData->iZoomWidth/2;tConCor.iRBy = -ptPicData->iZoomHeight/2;
60.
61.
62.
63. double sina = sin(RADIAN(fAngle));
64. double cosa = cos(RADIAN(fAngle));
65. tRonCor.iLTx =tConCor.iLTx * cosa + tConCor.iLTy * sina;
66. tRonCor.iLTy = -tConCor.iLTx * sina + tConCor.iLTy * cosa;
67. tRonCor.iRTx =tConCor.iRTx * cosa + tConCor.iRTy * sina;
68. tRonCor.iRTy = -tConCor.iRTx * sina + tConCor.iRTy * cosa;
69. tRonCor.iLBx = tConCor.iLBx * cosa + tConCor.iLBy * sina;
70. tRonCor.iLBy = -tConCor.iLBx * sina + tConCor.iLBy * cosa;
71. tRonCor.iRBx = tConCor.iRBx * cosa + tConCor.iRBy * sina;
72. tRonCor.iRBy = -tConCor.iRBx * sina + tConCor.iRBy * cosa;
73.
74.
75.
76. ptPicData->iRotateWidth = max(abs(tRonCor.iRBx - tRonCor.iLTx),abs(tRonCor.iRTx - tRonCor.iLBx));
77. ptPicData->iRotateHeight = max(abs(tRonCor.iRBy - tRonCor.iLTy),abs(tRonCor.iRTy - tRonCor.iLBy));
78.
79.
80. iDesLineSize = ((ptPicData->iRotateWidth* ptPicData->iBpp+ 23) / 24) * 3 ;
81.
82. ptPicData->pucRotateData = malloc(iDesLineSize * ptPicData->iRotateHeight);
83. if(NULL == ptPicData->pucRotateData){
84. printf("malloc error\n");
85. return -1;
86. }
87.
88.
90. for (i = 0; i < ptPicData->iRotateHeight; i++){
91. for (j = 0; j < ptPicData->iRotateWidth; j++){
92.
93. iX = (j - ptPicData->iRotateWidth / 2)*cos(RADIAN(360 - fAngle)) + (-i + ptPicData->iRotateHeight / 2)*sin(RADIAN(360 - fAngle));
94. iY = -(j - ptPicData->iRotateWidth / 2)*sin(RADIAN(360 - fAngle)) + (-i + ptPicData->iRotateHeight / 2)*cos(RADIAN(360 - fAngle));
95.
96. if (iX > ptPicData->iZoomWidth / 2 || iX < -ptPicData->iZoomWidth / 2 || iY > ptPicData->iZoomHeight / 2 || iY < -ptPicData->iZoomHeight / 2){
97. continue;
98. }
99.
100. int iXN = iX + ptPicData->iZoomWidth / 2;
101. int iYN = abs(iY - ptPicData->iZoomHeight / 2);
102.
103. memcpy(&ptPicData->pucRotateData[i * iDesLineSize + j * 3],&ptPicData->pucZoomData[iYN * iSrcLineSize + iXN * 3],3);
104. }
105. }
106. return 0;
107. }
 电子发烧友论坛
电子发烧友论坛 /9
/9 



 工商网监
湘ICP备2023018690号
工商网监
湘ICP备2023018690号




 1703
1703 淘帖
淘帖





