原文链接:http://985.so/9n8h7
1►院校简介

西安邮电大学是一所以工为主,以信息科学技术为特色,工、管、理、经、文、法、艺多学科协调发展的普通高等学校,是我国特别是西北地区信息产业和现代邮政业人才培养、科学研究的重要基地。
学校前身是1950年成立的陕西和甘肃两省邮电人员训练班及随后的西安邮电学校。1959年经国务院批准设立西安邮电学院,是国家在西北地区重点建设的唯一邮电类普通高校,2012年更名为西安邮电大学。学校先后隶属于邮电部和信息产业部,2000年划转到陕西省,现由陕西省人民政府与工业和信息化部共建,是陕西高水平大学建设高校、陕西省“一流大学、一流学科”建设高校、教育部“卓越工程师教育培养计划”实施高校、全国首批试办边防军人子女预科班的高校、西北地区唯一承担亚太电信组织和东盟培训任务的高校。
通信与信息工程学院(人工智能学院)是在原通信工程系基础上组建而成,学科和专业建设的历史可追溯至1959年西安邮电学院建院之初。拥有通信工程、物联网工程、人工智能、信息工程、电子信息科学与技术、广播电视工程、电信工程及管理7个本科专业。经过60多年的建设与发展,学院已成为西安邮电大学学科实力突出、专业优势明显、师资力量雄厚、历史渊源深远的学院之一。学院先后荣获陕西省教育系统精神文明建设先进集体、陕西省师德建设先进集体、陕西省教育系统先进集体、陕西省师德建设示范团队、全省高校党建“双创”标杆院系、陕西省高等学校创新创业教育改革试点学院等称号。
2►培训情况
创龙教仪技术服务工程师前往西安邮电大学-通信与信息工程学院(人工智能学院)-DSP技术实验室,针对DSP教学实验箱:TL25335-PlusTEB ,进行相关操作培训。

| TL28335-PlusTEB相关实验(部分) |
|---|
| DSP实验环境搭建与CCS开发基础 |
| DSP基础外设实验 |
| 电机控制类实验 |
| 语音类实验 |
| DSP算法实验 |
| 图像类实验 |
参与培训的老师和学生们对TL28335-PlusTEB相关实验操作表现出十足的热情,并对创龙教仪专业的技术能力与认真的工作态度表示了肯定。
面对日新月异的技术发展,创龙教仪在不断学习与探索新技术与高校新需求之间的联系,并通过不断改进的产品助力高校培养能够适应新社会生产需求的高级人才,以响应国家 二十大 **“产教融合”**的方针!
3►特色案例
实验名称:
3-2 减速编码电机控制实验、
实验目的:
(1) 理解PID控制原理。
(2) 学习增量式PID算法的原理。
(3) 掌握PID闭环控制电机的实现。
实验原理:
模拟PID控制原理
在过程控制中,按偏差的比例(P)、积分(I)和微分(D)进行控制的PID控制器(亦称PID调节器)是应用最为广泛的一种自动控制器。PID控制器原理简单,易于实现,适用面广,控制参数相互独立,参数的选定比较简单。
模拟PID控制系统的常规原理框图如下图所示。系统由模拟PID控制器和被控对象组成,r(t)是给定值,y(t)是系统的实际输出值,给定值与实际输出值构成控制偏差e(t)。
e(t)=r(t)-y(t)
控制偏差e(t)是PID控制的输入,u(t)是PID控制器的输出和被控对象的输入。模拟PID控制器的控制规律为

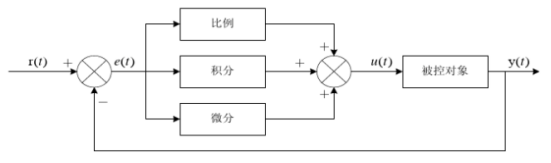
控制器的输出与输入误差信号成比例,当仅有比例控制时系统输出存在稳态误差。在模拟PID控制器中,比例控制的作用是对偏差瞬间做出反应。偏差产生后控制器立刻起控制作用,使偏差变小。比例系数Kp决定了控制作用的强弱,Kp越大,控制作用越强,过度越快,偏差也就越小。但是Kp越大,也更加容易产生振荡,破坏系统的稳定性。因此,比例系数Kp必须选择适当,才能使过渡时间变小,偏差小又稳定。
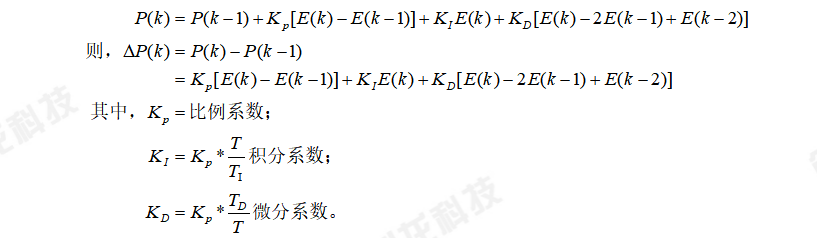
增量式PID算法
数字式PID控制算法可以分为位置式PID和增量式PID控制算法。在本实验中使用的增量式PID算法。增量式PID控制算法只需要计算控制量的增量。

可得控制器在第k-1个采样时刻的输出值为:

如果采用恒定的采样周期T,一旦确定了A、B、C,只要使用前后3次测量值的偏差,就可以求出控制增量。
除此之外,还有另一种算法:
PID算法程序解析
打开光盘资料中的"Demo\KingBox\Application\DC_GEAR_MOT\main.c"文件,可查看相关代码。比例常数、积分时间常数、微分时间常数和调控周期如下:

主函数中首先初始化系统控制,配置CPU主频、寄存器和初始化PIE控制等。调用InitMeasureSpeed函数初始化时钟、中断等。InitMeasureSpeed函数如下:
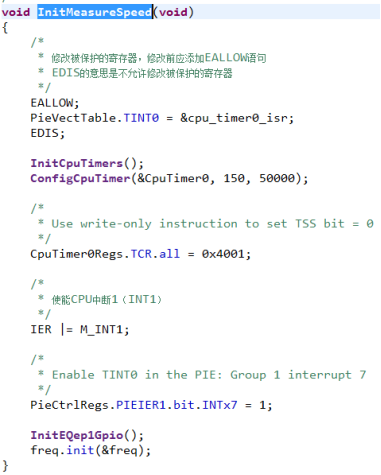
InitMeasureSpeed函数中,cpu_timer0_isr定时器中断函数中定时采集速度,并用于PID算法。freq.freqhz_pr为采集的电机脉冲数,M0_PWM_ON为高电平时间,M0_PWM_ON_NEW为新的高电平时间,PWM_ON_PID是经过PID算法后的高电平时间。cpu_timer0_isr定时器中断函数如下:

实验步骤
(1) 对实验设备进行硬件部分连接,连接好仿真器和USB串口线(默认为USB to UART串口输出)并上电。
(2) 右击计算机图标,点击“设备管理器->通用串行总线控制器”或者“设备->端口(COM和LPT)”,查看是否有对应的仿真器的选项出现,如有说明仿真器驱动已经正常安装,否则请先正确安装CCS。同时查看串口的端口号。
(3) 打开串口软件并设置串口调试工具,波特率为115200。
(4) 按照工程导入步骤导入光盘资料"Demo\KingBox\Application"路径下的DC_DEAR_MOT工程。
(5) 编译工程生成DC_DEAR_MOT.out的可执行程序。
(6) 实验箱上电,确认仿真文件(.ccxml 文件)配置,并连接CPU。
(7) 加载DC_DEAR_MOT.out可执行程序,并运行程序,本实验的功能是实现PID闭环控制电机。
实验现象
运行程序之后,串口显示如下图所示:
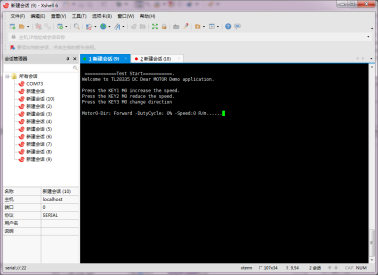
同时,数码管显示电机的转速和转向(0是转速,F代表顺时针转),如下:

第一次按下按键1后,减速直流电机开始顺时针(Forward)转动,占空比(DutyCycle)约为12%,转速(Speed)约为60R/min,显示如下图所示:

按下按键3后,电机会停止转动,同时串口打印电机转向为逆时针(Backward),电机转向由顺时针改为逆时针,如下:

4►设备概述

产品型号: TL28335-PlusTEB
处理器类型: TMS320F28335
应用领域: 于测控、自动化、工业控制、电力控制和电机控制
 /6
/6 



 工商网监
湘ICP备2023018690号
工商网监
湘ICP备2023018690号





















 淘帖
淘帖 368
368






