0、需要准备的软件
NuTool-PinConfigure_V1.23.0013 用于配置GPIO引脚复用
NuTool-ClockConfigure_V1.06.0007 用于配置芯片时钟树
1、功能模块的硬件介绍
使用了TJA1050作为CAN收发器,具体硬件介绍详见我的另一篇文章【NuMaker-M2354试用】CAN总线开发与测试分享【硬件篇】
硬件连接如下图所示:
目前,RTT中未开启CAN功能,需要手动开启CAN功能。
第一步,配置CAN引脚
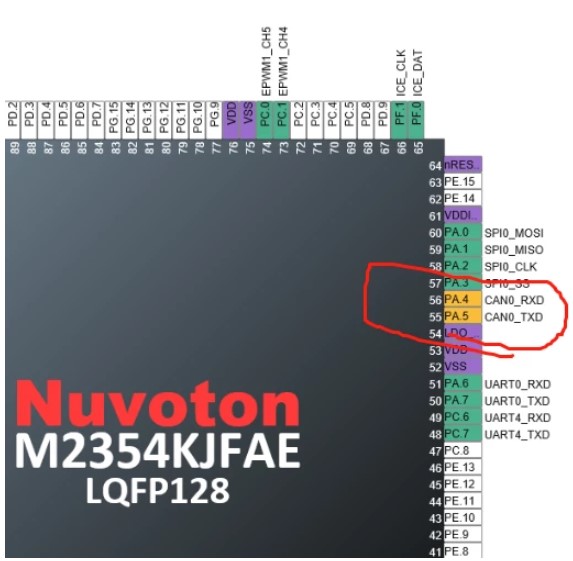
打开NuTool-PinConfigure工具,打开引脚复印配置文件,配置文件路径为:rt-thread\bsp\nuvoton\numaker-m2354\board\NuPinConfig\nutool_pincfg.cfg

使用PA4和PA5作为CAN0接口,设置如下图。
最关键的一步来了,生成C语言源代码,点击工具栏第三个按键,如下图所示。
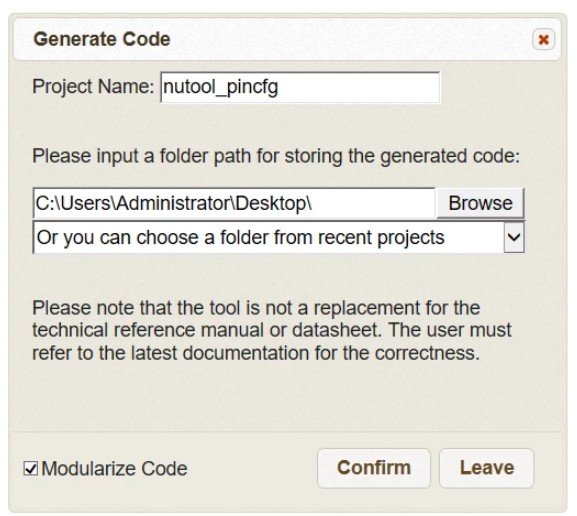
把生成的相关文件替换掉rt-thread\bsp\nuvoton\numaker-m2354\board\NuPinConfig目录下的文件,到此完成了CAN硬件接口的复用配置工作,进入到RTT配置阶段。
第二步,开启RTT的CAN功能
使用ENV打开menuconfig配置界面
进入Hardware Drivers Config → On-chip Peripheral DriversEnable页面,选中CAN相关的接口
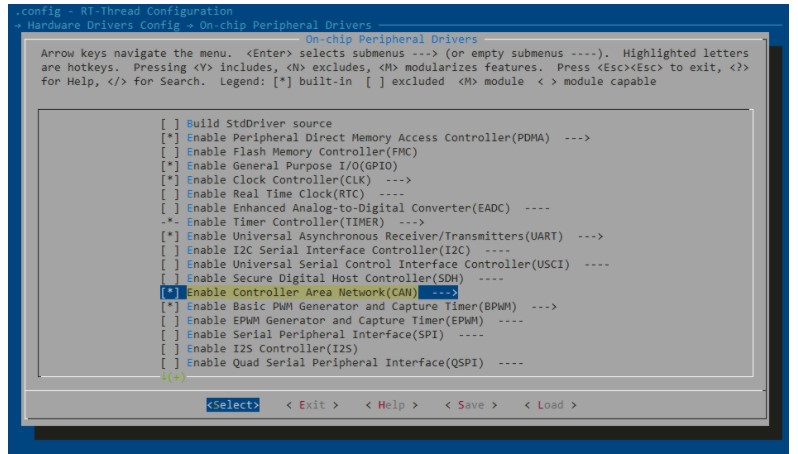
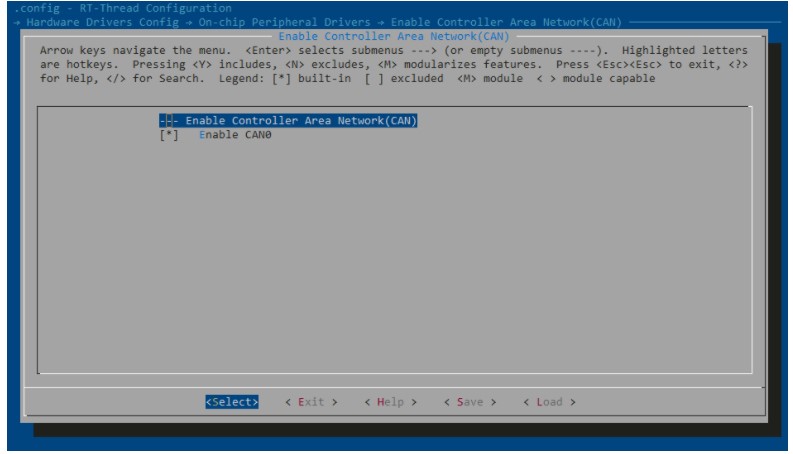
开启RTT 的CAN 驱动。
进入RT-Thread Components → Device Drivers界面
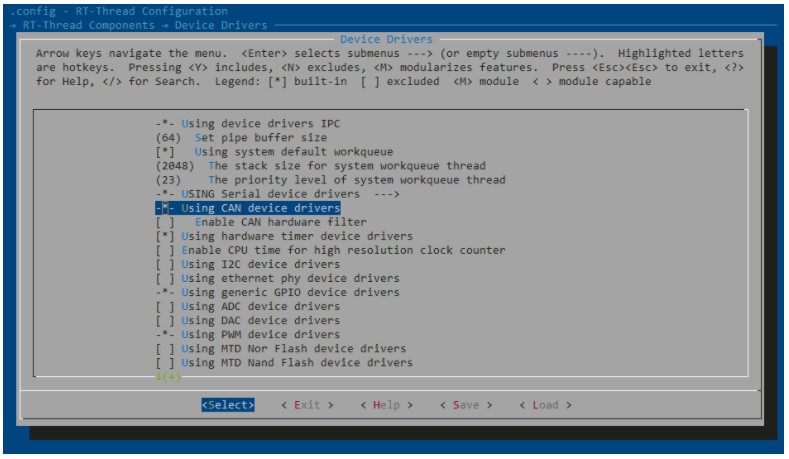
保存配置,然后生成MDK工程
scons --target=mdk5
到此软件配置结束。
2.软件编写
先来一个通用的CAN测试程序,开始努力爬坑。
/************************************************************************//
*
[url=home.php?mod=space&uid=855824]@copyright[/url] (C) 2019 Nuvoton Technology Corp. All rights reserved.
SPDX-License-Identifier: Apache-2.0
Change Logs:
Date Author Notes
2020-8-26 Wayne First version
*****************************************************************************/
#include <rtconfig.h>
#include <rtdevice.h>
#include <drv_gpio.h>
/ defined the LEDR pin: PD3 */
#define LEDR NU_GET_PININDEX(NU_PD, 3)
int main(int argc, char *argv)
{
#if defined(RT_USING_PIN)
int counter = 100;
/ set LEDR pin mode to output */
rt_pin_mode(LEDR, PIN_MODE_OUTPUT);
while (counter--)
{
rt_pin_write(LEDR, PIN_HIGH);
rt_thread_mdelay(500);
rt_pin_write(LEDR, PIN_LOW);
rt_thread_mdelay(500);
}
#endif
return 0;
}
#define USING_NUVOTON_HW_CAN_TXRX 1
///////////////////////////////////////////////////////
#if USING_NUVOTON_HW_CAN_TXRX
#include "NuMicro.h"
//CAN0初始化
void CAN0_Init(uint32_t u32BaudRate, uint32_t u32Mode)
{
CLK->APBCLK0 |= CLK_APBCLK0_CAN0CKEN_Msk;
CAN_Open(CAN0,u32BaudRate, u32Mode);
}
//CAN0发送数据帧
int CAN0_TX_FRAME(STR_CANMSG_T *TX_MSG)
{
if(TX_MSG==NULL) return -1;
if(CAN_BasicSendMsg(CAN0,TX_MSG)==TRUE) return 1;
return 0;
}
//CAN0接收数据帧
int CAN0_RX_FRAME(STR_CANMSG_T *RX_MSG)
{
if(RX_MSG==NULL) return -1;
if(CAN_BasicReceiveMsg(CAN0,RX_MSG)==TRUE)
{
CAN0->IF[1].MCON = 0;
return 1;
}
return 0;
}
void show_msg(STR_CANMSG_T *msg)
{
int i=0;
rt_kprintf("[ID:%x] ", msg->Id);
for (i = 0; i < msg->DLC; i++)
{
rt_kprintf("%2x ", msg->Data[i]);
}
rt_kprintf("\n\r");
}
static void can_rx_thread(void *parameter)
{
STR_CANMSG_T RX_MSG;
CAN0_Init(500000,CAN_BASIC_MODE);
while(1)
{
if(CAN0_RX_FRAME(&RX_MSG))
{
show_msg(&RX_MSG);
CAN0_TX_FRAME(&RX_MSG);
}
else
{
rt_thread_delay(2);
}
}
}
int can_sample(int argc, char *argv[])
{
struct rt_can_msg msg = {0};
rt_err_t res;
rt_size_t size;
rt_thread_t thread;
/* 创建数据接收线程 */
thread = rt_thread_create("can_rx", can_rx_thread, RT_NULL, 1024, 25, 10);
if (thread != RT_NULL)
{
rt_thread_startup(thread);
}
else
{
rt_kprintf("create can_rx thread failed!\n");
}
return res;
}
/* 导出到 msh 命令列表中 */
MSH_CMD_EXPORT(can_sample, can device sample);
///////////////////////////////////////////////////////
#else
////////////////////////////////////////////
/*
程序清单:这是一个 CAN 设备使用例程
例程导出了 can_sample 命令到控制终端
命令调用格式:can_sample can1
命令解释:命令第二个参数是要使用的 CAN 设备名称,为空则使用默认的 CAN 设备
程序功能:通过 CAN 设备发送一帧,并创建一个线程接收数据然后打印输出。
/
#include <rtthread.h>
#include "rtdevice.h"
#define CAN_DEV_NAME "can0" / CAN 设备名称 /
static struct rt_semaphore rx_sem; / 用于接收消息的信号量 /
static rt_device_t can_dev; / CAN 设备句柄 /
/ 接收数据回调函数 /
static rt_err_t can_rx_call(rt_device_t dev, rt_size_t size)
{
/ CAN 接收到数据后产生中断,调用此回调函数,然后发送接收信号量 */
rt_sem_release(&rx_sem);
return RT_EOK;
}
static void can_rx_thread(void parameter)
{
int i;
rt_err_t res;
struct rt_can_msg rxmsg = {0};
/ 设置接收回调函数 /
rt_device_set_rx_indicate(can_dev, can_rx_call);
#ifdef RT_CAN_USING_HDR
struct rt_can_filter_item items[5] =
{
RT_CAN_FILTER_ITEM_INIT(0x100, 0, 0, 1, 0x700, RT_NULL, RT_NULL), / std,match ID:0x1000x1ff,hdr 为 - 1,设置默认过滤表 /
RT_CAN_FILTER_ITEM_INIT(0x300, 0, 0, 1, 0x700, RT_NULL, RT_NULL), / std,match ID:0x3000x3ff,hdr 为 - 1 /
RT_CAN_FILTER_ITEM_INIT(0x211, 0, 0, 1, 0x7ff, RT_NULL, RT_NULL), / std,match ID:0x211,hdr 为 - 1 /
RT_CAN_FILTER_STD_INIT(0x486, RT_NULL, RT_NULL), / std,match ID:0x486,hdr 为 - 1 /
{0x555, 0, 0, 1, 0x7ff, 7,} / std,match ID:0x555,hdr 为 7,指定设置 7 号过滤表 /
};
struct rt_can_filter_config cfg = {5, 1, items}; / 一共有 5 个过滤表 /
/ 设置硬件过滤表 /
res = rt_device_control(can_dev, RT_CAN_CMD_SET_FILTER, &cfg);
RT_ASSERT(res == RT_EOK);
#endif
while (1)
{
/ hdr 值为 - 1,表示直接从 uselist 链表读取数据 /
rxmsg.hdr = -1;
/ 阻塞等待接收信号量 /
rt_sem_take(&rx_sem, RT_WAITING_FOREVER);
/ 从 CAN 读取一帧数据 /
rt_device_read(can_dev, 0, &rxmsg, sizeof(rxmsg));
/ 打印数据 ID 及内容 /
rt_kprintf("ID:%x", rxmsg.id);
for (i = 0; i < 8; i++)
{
rt_kprintf("%2x", rxmsg.data[i]);
}
rt_kprintf("\n");
}
}
int can_sample(int argc, char argv[])
{
struct rt_can_msg msg = {0};
rt_err_t res;
rt_size_t size;
rt_thread_t thread;
char can_name[RT_NAME_MAX];
if (argc == 2)
{
rt_strncpy(can_name, argv[1], RT_NAME_MAX);
}
else
{
rt_strncpy(can_name, CAN_DEV_NAME, RT_NAME_MAX);
}
/ 查找 CAN 设备 /
can_dev = rt_device_find(can_name);
if (!can_dev)
{
rt_kprintf("find %s failed!\n", can_name);
return RT_ERROR;
}
/ 初始化 CAN 接收信号量 /
rt_sem_init(&rx_sem, "rx_sem", 0, RT_IPC_FLAG_FIFO);
/ 以中断接收及发送方式打开 CAN 设备 /
res = rt_device_open(can_dev, RT_DEVICE_FLAG_INT_TX | RT_DEVICE_FLAG_INT_RX);
RT_ASSERT(res == RT_EOK);
/ 设置 CAN 通信的波特率为 500kbit/s/
res = rt_device_control(can_dev, RT_CAN_CMD_SET_BAUD, (void )CAN500kBaud);
RT_ASSERT(res == RT_EOK);
/ 设置 CAN 的工作模式为正常工作模式 */
res = rt_device_control(can_dev, RT_CAN_CMD_SET_MODE, (void )RT_CAN_MODE_NORMAL);
RT_ASSERT(res == RT_EOK);
/ 创建数据接收线程 /
thread = rt_thread_create("can_rx", can_rx_thread, RT_NULL, 1024, 25, 10);
if (thread != RT_NULL)
{
rt_thread_startup(thread);
}
else
{
rt_kprintf("create can_rx thread failed!\n");
}
msg.id = 0x78; / ID 为 0x78 /
msg.ide = RT_CAN_STDID; / 标准格式 /
msg.rtr = RT_CAN_DTR; / 数据帧 /
msg.len = 8; / 数据长度为 8 /
/ 待发送的 8 字节数据 /
msg.data[0] = 0x00;
msg.data[1] = 0x11;
msg.data[2] = 0x22;
msg.data[3] = 0x33;
msg.data[4] = 0x44;
msg.data[5] = 0x55;
msg.data[6] = 0x66;
msg.data[7] = 0x77;
/ 发送一帧 CAN 数据 /
size = rt_device_write(can_dev, 0, &msg, sizeof(msg));
if (size == 0)
{
rt_kprintf("can dev write data failed!\n");
}
else
{
rt_kprintf("can dev write data success!\n");
}
return res;
}
/ 导出到 msh 命令列表中 */
MSH_CMD_EXPORT(can_sample, can device sample);
#endif
在这个程序中,设置了默认了波特率为500K bps,使用中断接收和中断发送来初始化功能,当收到一帧数据时,立刻把该帧数据发送出去。这个程序是专门为了测试CAN总线性能而设置的。
3、外设性能指标测试
开始测试,因为是使用了ZLG USBCAN II的CAN卡,使用先打开ZCANPRO软件,连接CAN 卡,设置波特率为500K pbs;发送标准帧,数据长度为8。单次测试循环发送100帧,帧间隔5ms用来模拟常规CAN总线上普通负载情况下的通信压力。
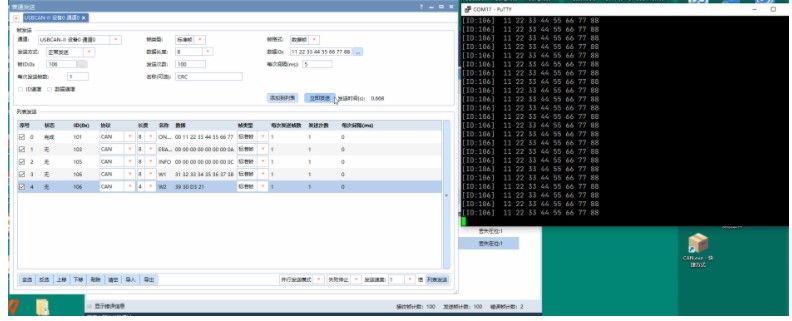
就目前来说,测试结果比较理想的。就每秒200帧标准帧数据毫无压力。
4、心得体会
就使用来说,新唐提供的CAN相关驱动是可以使用的,常规使用下可以稳定的通信,但是在细节上并不完美,有线主机厂规定了特定的非标准采样点百分比,需要一个相关的接口来设置相关BRP、TSEG1、TSEG2等相关参数,但是CAN驱动内并没有提供,后续肯定是需要增加这个接口来适应主机厂的需求的。
原作者:xuyu
 /6
/6 



 工商网监
湘ICP备2023018690号
工商网监
湘ICP备2023018690号






 588
588






 淘帖
淘帖





