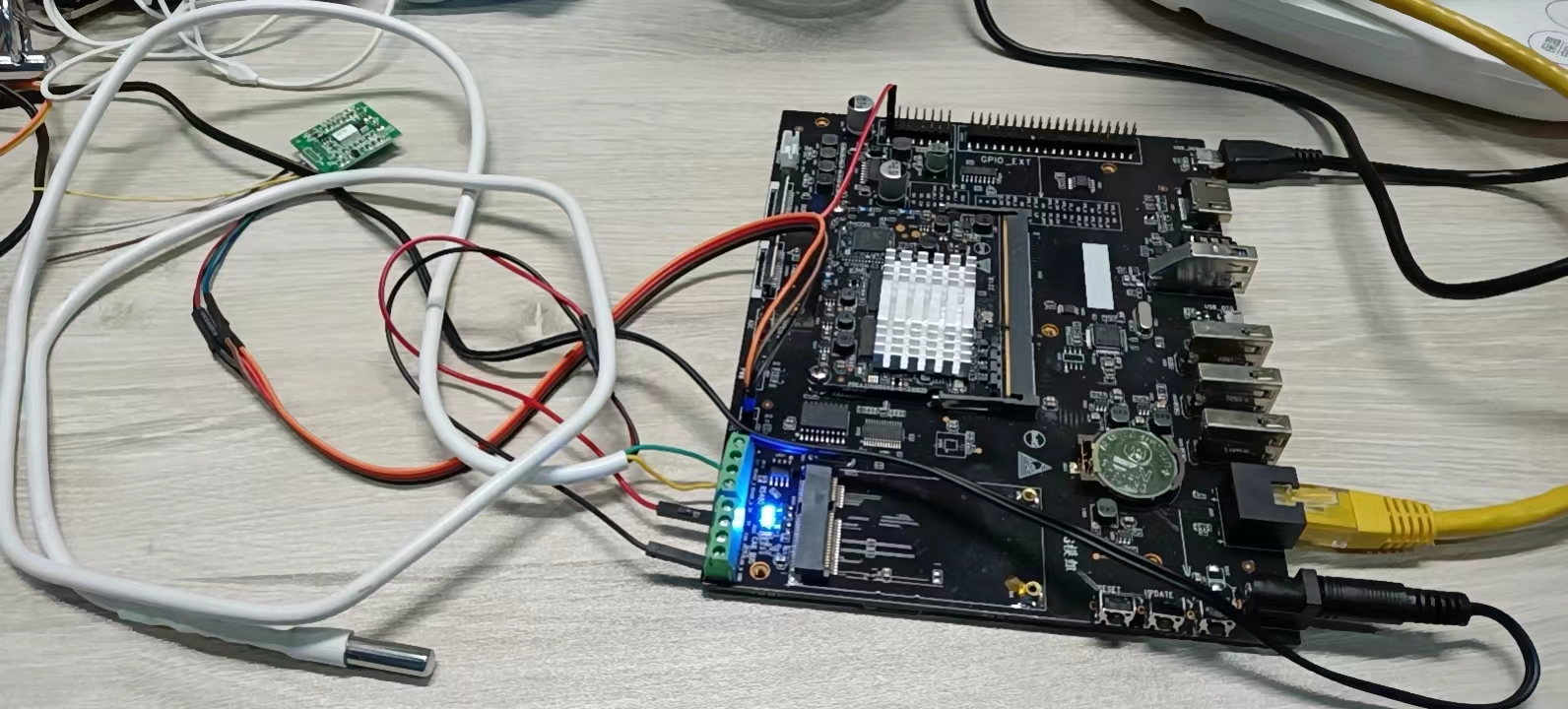
1. 硬件连接
2. 部分软件代码
void Th10sUart::buildSensorStatus(diagnostic_updater::DiagnosticStatusWrapper &stat)
{
if (!serial_->isOpen())
{
stat.summary(diagnostic_msgs::DiagnosticStatus::ERROR, "IO error");
}
else
{
stat.summary(diagnostic_msgs::DiagnosticStatus::OK, "formaldehyde is ok");
}
}
void Th10sUart::updateDiagnostics()
{
int max_count = output_hz_;
diag_count_++;
if (diag_count_ >= max_count)
{
diag_count_ = 0;
diagnostic_updater_.update();
}
}
uint16_t Th10sUart::check_crc(const uint8_t *data, uint8_t len)
{
int i,j;
uint16_t crc = 0xffff;
for(i = 0; i < len - 2; i++)
{
crc ^= data[i];
for(j = 0; j < 8; j++)
{
if(crc & 0x01)
{
crc = crc >> 1;
crc = crc ^ 0xa001;
}
else
{
crc = crc >> 1;
}
}
}
return crc;
}
bool Th10sUart::is_check_crc(uint8_t *data, uint8_t len)
{
uint16_t crc_data = (uint16_t)data[len - 1] << 8| data[len -2];
if(check_crc(data, len) == crc_data)
{
return true;
}
return false;
}
void Th10sUart::update(const ros::TimerEvent& e)
{
if (serial_->isOpen())
{
uint8_t write_buffer[write_buffer_size] =
{0x10, 0x03, 0x00, 0x00, 0x00, 0x02, 0xc7, 0x4a};
uint8_t read_buffer[read_buffer_size];
serial_->write(write_buffer, write_buffer_size);
ros::Duration(0.25).sleep();
size_t n = serial_->available();
if ( n != 0)
{
serial_->read(read_buffer, read_buffer_size);
int16_t humid,thermo;
if (!is_check_crc(read_buffer, read_buffer_size))
{
return;
}
thermo = (int16_t)(((uint16_t)read_buffer[3] << 8)| read_buffer[4]);
humid = (int16_t)(((uint16_t)read_buffer[5] << 8) | read_buffer[6]);
std_msgs::Float64 msg;
msg.data = (double)thermo/10.0;
thermo_pub_.publish(msg);
msg.data = (double)humid/10.0;
humid_pub_.publish(msg);
}
}
else
{
int max_count = output_hz_ * 5;
open_count_++;
if (open_count_ >= max_count)
{
open_count_ = 0;
try
{
serial_->open();
}
catch (std::exception &e)
{
ROS_WARN("open serial port failed");
}
}
}
updateDiagnostics();
}
3. 启动th10s节点

4. 获取温湿度数据
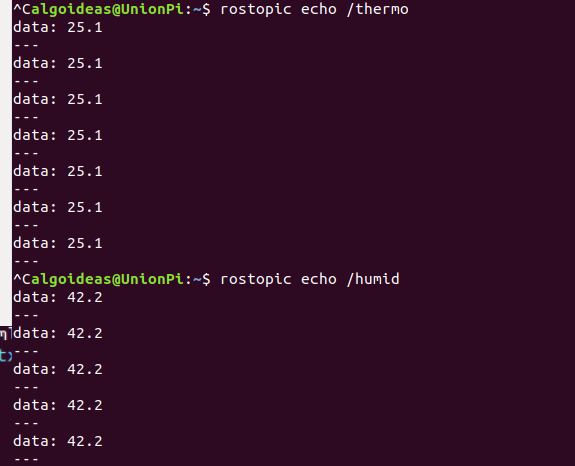

th10s
|  /7
/7 



 工商网监
湘ICP备2023018690号
工商网监
湘ICP备2023018690号






 996
996


 淘帖
淘帖






