- 特性介绍 -
背景
openEuler秉承着打造“数字化基础设施操作系统”的愿景,为促进与OpenHarmony生态的合作与互通,实现端边领域的互通和协同,首次在嵌入式领域引入分布式软总线技术。
分布式软总线是OpenHarmony社区开源的分布式设备通信基座,为设备之间的互通互联提供统一的分布式协同能力,实现设备无感发现和高效传输。
OpenHarmony主要面向强交互等需求的智能终端、物联网终端和工业终端。openEuler主要面向有高可靠、高性能等需求的服务器、边缘计算、云和嵌入式设备,二者各有侧重。通过以分布式软总线为代表的技术进行生态互通,以期实现“1+1>2”的效果,支撑社区用户开拓更广阔的行业空间。
架构
软总线的主要架构如下:
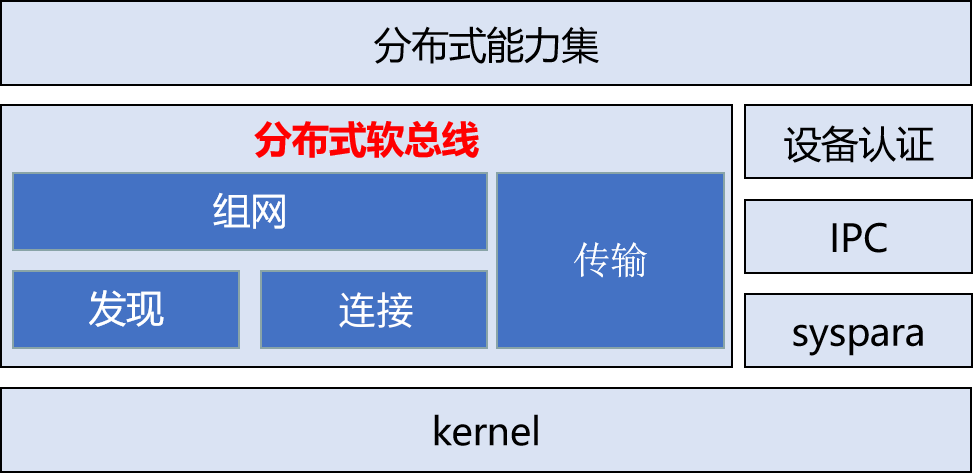
软总线主体功能分为发现、组网、连接和传输四个基本模块,实现:
· 即插即用: 快速便捷发现周边设备。
· 自由流转: 各设备间自组网,任意建立业务连接,实现自由通信。
· 高效传输: 通过WIFI、蓝牙设备下软硬件协同最大化发挥硬件传输性能。
软总线南向支持标准以太网通信,同时后续可持续拓展WIFI、蓝牙等多种通信方式。并为北向的分布式应用提供统一的API接口,屏蔽底层通信机制。
软总线依赖于设备认证、IPC、日志和系统参数(SN号)等周边模块,嵌入式系统中将这些依赖模块进行了样板性质的替换,以实现软总线基本功能。实际的周边模块功能实现,还需要用户根据实际业务场景进行丰富和替换,以拓展软总线能力。
- 应用指南 -
部署示意
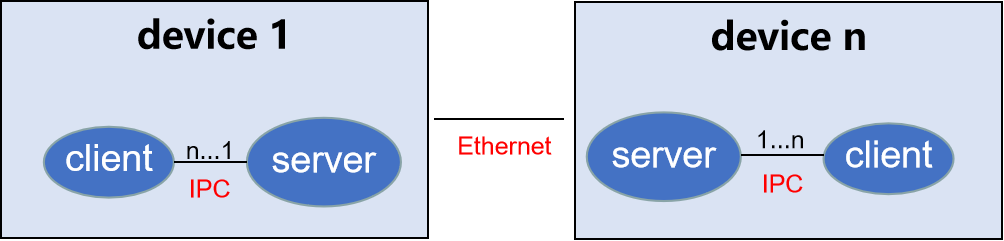
软总线支持局域网内多设备部署,设备间通过以太网通信。单设备上分为server和client,二者通过IPC模块进行交互。
注意:
当前IPC模块和SN号等系统参数,嵌入式版本提供的仅为参考模板,还无法支持多节点和多client部署。用户可根据实际业务场景进行IPC模块和SN号系统参数进行功能丰富,以拓展软总线部署能力。
服务端启动
服务端主程序为softbus_server_main,执行该主程序既可拉起软总线服务端。
对拟上市公司的股东和董事、监事和高管的资格审查是证监会核查的重点。部分拟上市公司在首发上市前存在股东及/或董事、监事和高管在政府机关担任公务员的情形。为此,笔者特结合相关案例对此类规定进行归纳总结。
```bash
openeuler ~ # softbus_server_main >log.file &
当服务端被拉起时,会主动通过名为ethX的网络设备进行coap广播,若探测到对端设备存在则会启动自组网。
客户端API
头文件在sdk和initrd中均存放在/usr/include/dsoftbus/下,其中:
- discovery_service.h:发现模块头文件,支持应用主动探测和发布的API如下:

当服务端被拉起时,会主动通过名为ethX的网络设备进行coap广播,若探测到对端设备存在则会启动自组网。
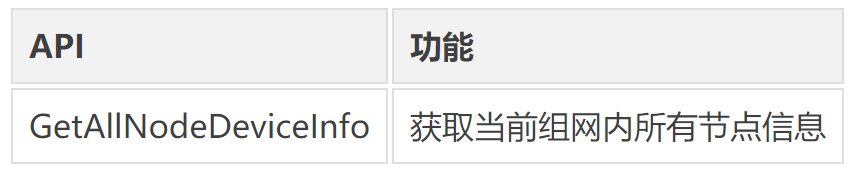
- softbus_bus_center.h:组网模块头文件,支持获取组网内设备信息API如下:
- session.h:连接/传输模块头文件,支持创建session和数据传输API如下:

各API参数详见头文件描述。
应用示例
1.编写客户端程序
编写客户端程序依托于Embedded版本发布的SDK,按如下步骤进行SDK环境使用准备。
1.1 安装SDK
执行SDK自解压安装脚本
sh openeuler-glibc-x86_64-openeuler-image-aarch64-qemu-aarch64-toolchain-22.03.sh
根据提示输入工具链的安装路径,默认路径是/opt/openeuler//;若不设置,则按默认路径安装;也可以配置相对路径或绝对路径。
举例如下:
sh ./openeuler-glibc-x86_64-openeuler-image-armv7a-qemu-arm-toolchain-22.03.sh``
openEuler embedded(openEuler Embedded Reference Distro) SDK installer version 22.03
================================================================
Enter target directory for SDK (default: /opt/openeuler/22.03): sdk
You are about to install the SDK to "/usr1/openeuler/sdk". Proceed [Y/n]? y
Extracting SDK...............................................done
Setting it up...SDK has been successfully set up and is ready to be used.
Each time you wish to use the SDK in a new shell session, you need to source the environment setup script e.g.
. /usr1/openeuler/sdk/environment-setup-armv7a-openeuler-linux-gnueabi
1.2 设置SDK环境变量
前一步执行结束最后已打印source命令,运行即可。
. /usr1/openeuler/myfiles/sdk/environment-setup-armv7a-openeuler-linux-gnueabi
1.3 查看是否安装成功
运行如下命令,查看是否安装成功、环境设置成功。
arm-openeuler-linux-gnueabi-gcc -v
接下来编写客户端程序。
创建一个main.c文件,源码如下:
#include "dsoftbus/softbus_bus_center.h"
#include <stdio.h>
#include <stdlib.h>
int main(void)
{
int32_t infoNum = 10;
NodeBasicInfo **testInfo = malloc(sizeof(NodeBasicInfo *) * infoNum);
int ret = GetAllNodeDeviceInfo("testClient", testInfo, &infoNum);
if (ret != 0) {
printf("Get node device info fail.\n");
return 0;
}
printf("Get node num: %d\n", infoNum);
for (int i = 0; i < infoNum; i++) {
printf("\t networkId: %s, deviceName: %s, deviceTypeId: %d\n",
testInfo[i]->networkId,
testInfo[i]->deviceName,
testInfo[i]->deviceTypeId);
}
for (int i = 0; i < infoNum; i++) {
FreeNodeInfo(testInfo[i]);
}
free(testInfo);
testInfo = NULL;
return 0;
}
创建一个CMakeLists.txt文件,源码如下:
project(dsoftbus_hello C)
add_executable(dsoftbus_hello main.c)
target_link_libraries(dsoftbus_hello dsoftbus_bus_center_service_sdk.z)
编译客户端
mkdir build
cd build
cmake ..
make
编译完成后会得到dsoftbus_hello。
2. 构建QEMU组网环境
在host中创建网桥br0
brctl addbr br0
启动qemu1
qemu-system-aarch64 -M virt-4.0 -m 1G -cpu cortex-a57 -nographic -kernel zImage -initrd <openeuler-image-qemu-xxx.cpio.gz> -device virtio-net-device,netdev=tap0,mac=52:54:00:12:34:56 -netdev bridge,id=tap0
注意
首次运行如果出现如下错误提示:
failed to parse default acl file `/usr/local/libexec/../etc/qemu/bridge.conf'
qemu-system-aarch64: bridge helper failed
则需要向指示的文件添加“allow br0”
echo "allow br0" > /usr/local/libexec/../etc/qemu/bridge.conf
启动qemu2
qemu-system-aarch64 -M virt-4.0 -m 1G -cpu cortex-a57 -nographic -kernel zImage -initrd openeuler-image-qemu-aarch64-20220331025547.rootfs.cpio.gz -device virtio-net-device,netdev=tap1,mac=52:54:00:12:34:78 -netdev bridge,id=tap1
注意
qemu1与qemu2的mac地址需要配置为不同的值。
配置IP
配置host的网桥地址
ifconfig br0 192.168.10.1 up
配置qemu1的网络地址
ifconfig eth0 192.168.10.2
配置qemu2的网络地址
ifconfig eth0 192.168.10.3
分别在host、qemu1、qemu2使用ping进行测试,确保qemu1可以ping通qemu2。
3. 启动分布式软总线
在qemu1和qemu2中启动分布式软总线的服务端
softbus_server_main >log.file &
将编译好的客户端分发到qemu1和qemu2的根目录中
scp dsoftbus_hello root@192.168.10.2:/
scp dsoftbus_hello root@192.168.10.3:/
分别在qemu1和qemu2的根目录下运行dsoftbus_hello,将得到如下输出:
qemu1
[LNN]NodeStateCbCount is 10
[LNN]BusCenterClientInit init OK!
[DISC]Init success
[TRAN]init tcp direct channel success.
[TRAN]init succ
[COMM]softbus server register service success!
[COMM]softbus sdk frame init success.
Get node num: 1
networkId: 714373d691265f9a736442c01459ba39236642c743a71750bb63eb73cde24f5f, deviceName: UNKNOWN, deviceTypeId: 0
qemu2
[LNN]NodeStateCbCount is 10
[LNN]BusCenterClientInit init OK!
[DISC]Init success
[TRAN]init tcp direct channel success.
[TRAN]init succ
[COMM]softbus server register service success!
[COMM]softbus sdk frame init success.
Get node num: 1
networkId: eaf591f64bab3c20304ed3d3ff4fe1d878a0fd60bf8c85c96e8a8430d81e4076,deviceName: UNKNOWN, deviceTypeId: 0
qemu1和qemu2分别输出了发现的对方设备的基础信息。
编译指导
编译依托于Embedded版本发布的容器镜像,请参考容器构建指导进行容器环境准备。
容器构建指导链接:
https://docs.openeuler.org/zh/docs/22.03_LTS/docs/Embedded/容器构建指导.html
1. 下载脚本所在仓库 (例如下载到src/yocto-meta-openeuler目录下)
git clone https://gitee.com/openeuler/yocto-meta-openeuler.git -b openEuler-22.03-LTS -v src/yocto-meta-openeuler
下载最新软总线代码:
sh src/yocto-meta-openeuler/scripts/download_code.sh dsoftbus
代码默认下载到与yocto-meta-openeuler同级别的路径,如需修改软总线或者其依赖的模块代码可到对应路径下查找dsoftbus/_standard和yocto-embedded-tools仓库进行对应修改。
3. 编译编译脚本
编译最新软总线代码:
sh src/yocto-meta-openeuler/scripts/compile.sh dsoftbus
编译工作目录名为dsoftbus/_build,编译生成件目录名为dsoftbus/_output,二者均默认与yocto-meta-openeuler在同级别路径。
**- **限制约束 -
-
仅支持局域网下的coap发现。WIFI/BLE等功能在后续版本中持续支持。
-
目前提供的IPC、SN号等软总线的依赖模块均为样例,仅支持双设备节点部署,client-server一对一部署的能力。期待后续与社区伙伴,根据实际场景共同对这些依赖模块进行实例化。
 电子发烧友论坛
电子发烧友论坛 /9
/9 



 工商网监
湘ICP备2023018690号
工商网监
湘ICP备2023018690号









 淘帖
淘帖 1606
1606






