ADS1271采集的数据波动较大,但是参考电压已经用了高精度基准,为什么还会这么大波动?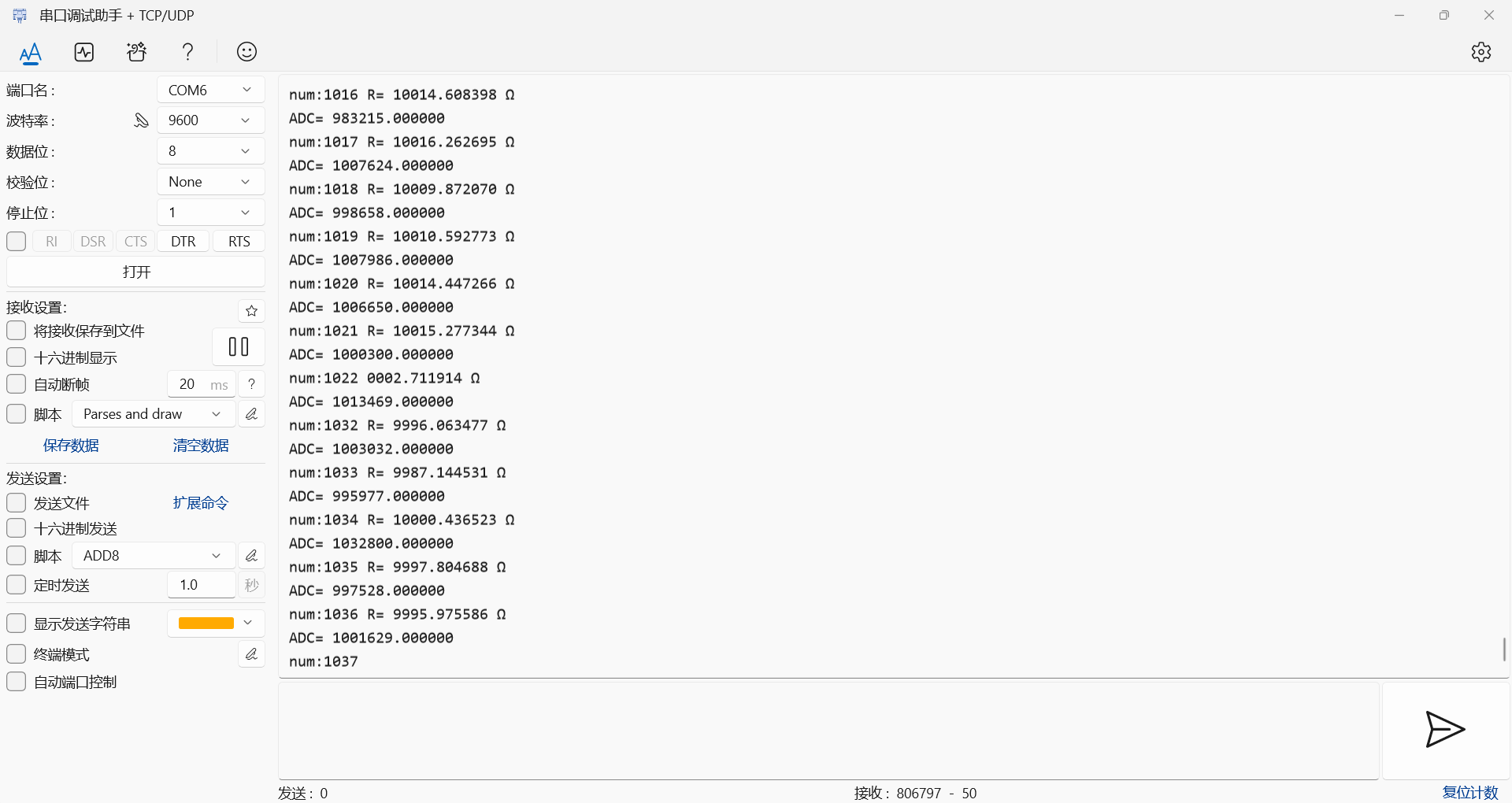
相关代码:
#include "ads1271.h"
#include "stm32f10x_gpio.h"
#include "stm32f10x_rcc.h"
#include "stm32f10x_tim.h"
#include "stdio.h"
#include "Delay.h"
#include "filter.h"
static uint32_t currentSampleRate = ADS1271_SAMPLE_RATE;
// 初始化ADS1271
void ADS1271_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
// 使能GPIO和TIM1时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_TIM1, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB | RCC_APB1Periph_TIM3, ENABLE);
// 配置CLK引脚(PA8)为复用推挽输出(TIM1_CH1)
GPIO_InitStructure.GPIO_Pin = ADS1271_CLK_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_2MHz;
GPIO_Init(ADS1271_CLK_PORT, &GPIO_InitStructure);
// 配置SCLK引脚(PA5)为推挽输出
GPIO_InitStructure.GPIO_Pin = ADS1271_SCLK_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init(ADS1271_SCLK_PORT, &GPIO_InitStructure);
// 配置DRDY引脚(PA4)为输入
GPIO_InitStructure.GPIO_Pin = ADS1271_DRDY_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; // 输入模式下无效
GPIO_Init(ADS1271_DRDY_PORT, &GPIO_InitStructure);
// 配置DOUT引脚(PA6)为输入
GPIO_InitStructure.GPIO_Pin = ADS1271_DOUT_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; // 输入模式下无效
GPIO_Init(ADS1271_DOUT_PORT, &GPIO_InitStructure);
// 配置TIM1产生CLK信号
TIM_TimeBaseStructure.TIM_Period = ((SystemCoreClock / (1*2 * ADS1271_CLK_FREQ))-1 )/1;
TIM_TimeBaseStructure.TIM_Prescaler = 2;
TIM_TimeBaseStructure.TIM_ClockDivision = 0;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM1, &TIM_TimeBaseStructure);
// 配置TIM1通道1为PWM模式
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_Pulse = TIM_TimeBaseStructure.TIM_Period / 2; // 50%占空比
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OC1Init(TIM1, &TIM_OCInitStructure);
// 使能TIM1
TIM_Cmd(TIM1, ENABLE);
TIM_CtrlPWMOutputs(TIM1, ENABLE);
// 初始状态
GPIO_ResetBits(ADS1271_SCLK_PORT, ADS1271_SCLK_PIN);
}
// 调整采样率
void ADS1271_AdjustSampleRate(uint32_t sampleRate)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
uint32_t clkFreq = 512 * sampleRate; // 高速模式下CLK = 512×f_DATA
if(sampleRate == currentSampleRate) return;
// 停止TIM1
TIM_Cmd(TIM1, DISABLE);
// 重新配置TIM1
TIM_TimeBaseStructure.TIM_Period = ((SystemCoreClock / (1*2 * ADS1271_CLK_FREQ))-1 )/1;
TIM_TimeBaseStructure.TIM_Prescaler = 2;
TIM_TimeBaseStructure.TIM_ClockDivision = 0;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM1, &TIM_TimeBaseStructure);
// 重新设置PWM占空比
TIM_SetCompare1(TIM1, TIM_TimeBaseStructure.TIM_Period / 2);
// 重新启动TIM1
TIM_Cmd(TIM1, ENABLE);
currentSampleRate = sampleRate;
}
// 检查数据是否准备好
uint8_t ADS1271_DataReady(void)
{
return (GPIO_ReadInputDataBit(ADS1271_DRDY_PORT, ADS1271_DRDY_PIN) == RESET);
}
// 读取24位数据
uint32_t ADS1271_ReadData(void)
{
uint32_t data = 0;
uint8_t i;
// 等待数据准备好
while(!ADS1271_DataReady());
// 读取24位数据
for(i = 0; i < 24; i++)
{
// 产生SCLK下降沿
GPIO_ResetBits(ADS1271_SCLK_PORT, ADS1271_SCLK_PIN);
Delay_us(1);
// 产生SCLK上升沿
GPIO_SetBits(ADS1271_SCLK_PORT, ADS1271_SCLK_PIN);
// 读取数据位
if(GPIO_ReadInputDataBit(ADS1271_DOUT_PORT, ADS1271_DOUT_PIN))
{
data |= (1 << (23 - i));
}
Delay_us(1);
}
return data;
}
 已退回10积分
已退回10积分
更多回帖


