本文通过具体工程案例,展示了 ME32G070 芯片在串口通信、PWM输出、ADC读取等方面的测试情况。
ME32G070 具有非常灵活的时钟控制系统。
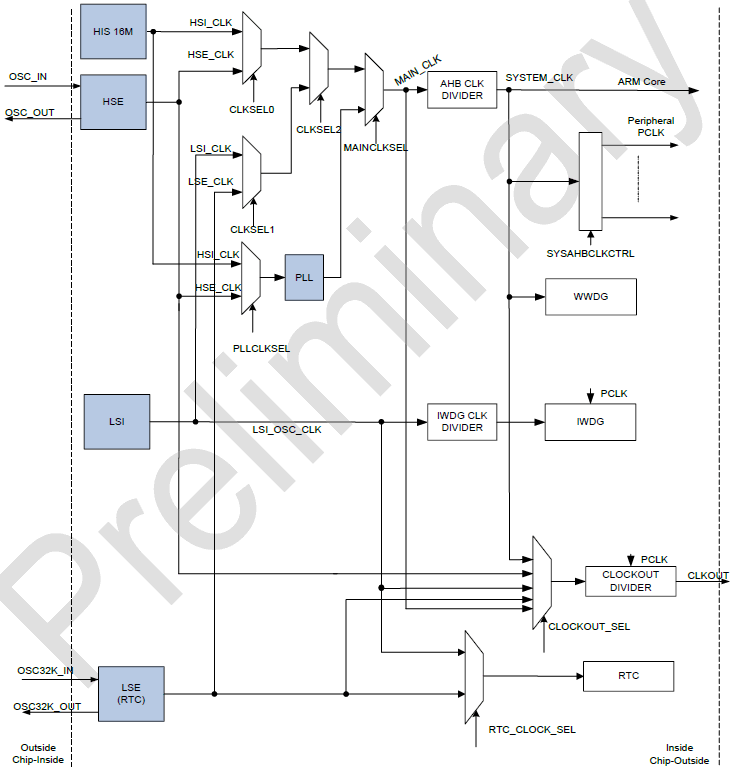
系统上电复位后, ME32G070 会一直采用HSI时钟直到用户使用软件切换到其它的时钟源。
系统可以在没有外部晶振时以已知的频率执行引导程序。
SYSAHBCLKCTRL寄存器用于存储器及外设时钟供给控制。
窗口看门狗(WWDG)计数时钟可来自于系统时钟(main clock), 而独立看门狗IWDG只可能是LSI。
主时钟(main clock),HSI及看门狗振荡器时钟都可从CLKOUT管脚输出。
RTC计数时钟可以是来自LSI,也可以来自外部32K晶振(LSE)。
系统主时钟可以是内部晶振时钟(HSI),外部晶振(HSE),内部低速时钟(LSI),外部RTC(LSE)以及PLL输出时钟。主时钟可作为内核、外设和存储器的时钟源。
ME32G070 提供 5 个带 16 字节 FIFO 缓存器的增强型 UART 外设:
UART0/UART1/UART2/UART3/UART4。
串行接口都支持红外传输(IrDA)协议功能。
时钟都受 SYSAHBCLKCTRL 寄存器控制。
根据原理图可知
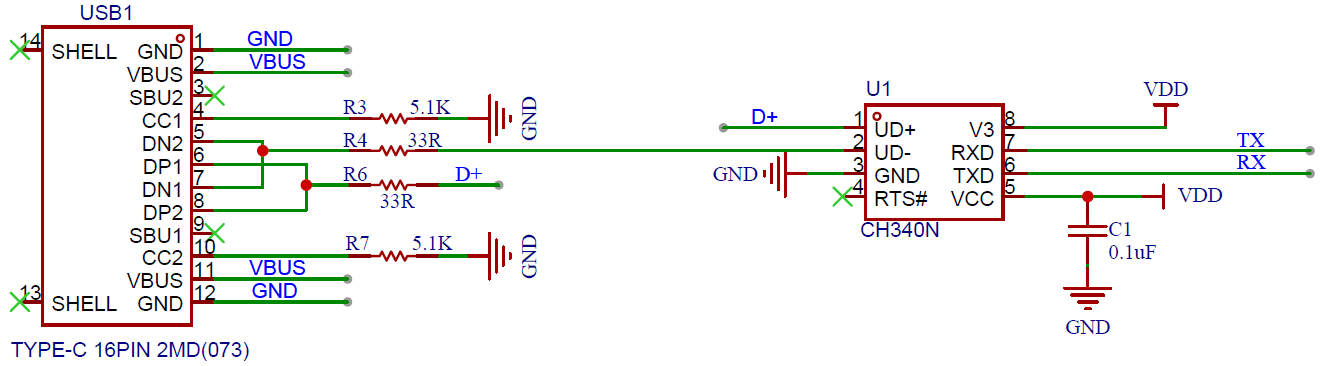
Type-C 接口与 CH340N 串口通信芯片相连,
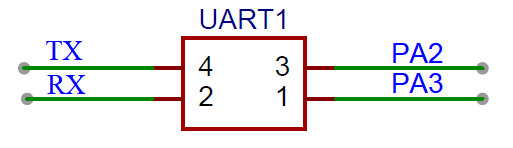
发送 TX 和接收 RX 引脚通过跳线帽分别与 MCU 的 PA2 (MCU_RX)和 PA3 (MCU_TX)相连。
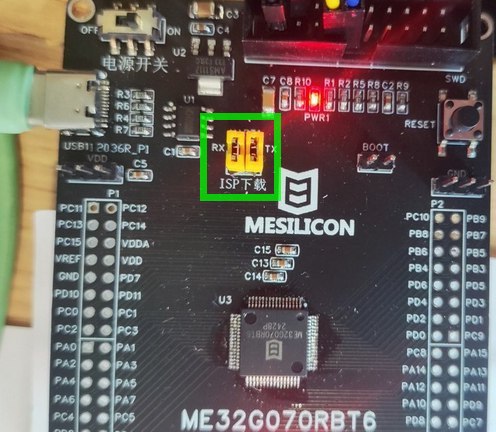
因此,若要实现Type-C线连接单片机串口,需要用跳线帽短接 4-3 及 2-1,如下图所示
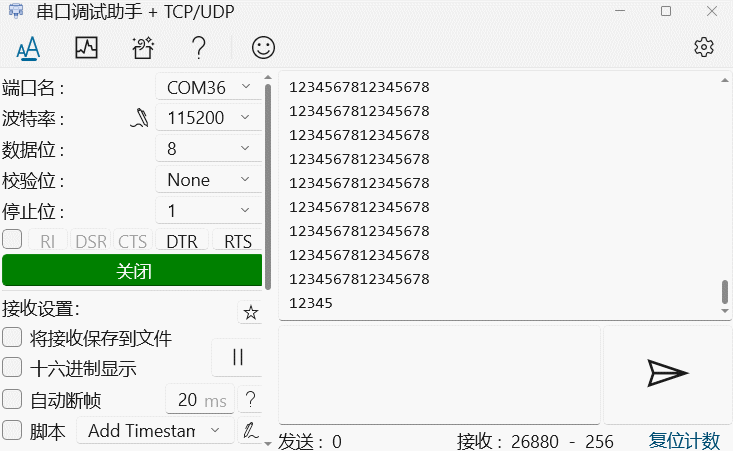
循环发送 12345678 字符至串口
//UART1 ECHO demo Main Program
#include "me32g070.h"
#include "me32g070_sys.h"
#include "me32g070_uart.h"
#include "me32g070_gpio.h"
#include "me32g070_ioconfig.h"
uint8_t data_index=18;
uint8_t txdata[18]={0x31,0x32,0x33,0x34,0x35,0x36,0x37,0x38,0x31,0x32,0x33,0x34,0x35,0x36,0x37,0x38,0x0D,0x0A};
//Main function entry
int main(void)
{
SystemInit();
//init uart pin
PA2_INIT(PA2_UART1_TX);
PA3_INIT(PA3_UART1_RX);
//initial UART1
UART_Open(UART1,115200,UART_NO_PARITY,UART_TRIGGER_LEVEL_1_BYTE);
NVIC_EnableIRQ(UART1_IRQn);
while(1)
{
if ((data_index==18)&&(PB->PIN_b.PIN14==0))
{
data_index=0;
//enable TX interruppt to start uart send
UART_EnableInt(UART1, UART_TX_INT);
}
}
}
void UART1_IRQHandler(void)
{
//put data into uart FIFO
while(UART1->LSR_b.THRE)
{
if(data_index<18)
{
UART1->THR=txdata[data_index++];
}else
{
//disable TX interruppt when data send is done
UART_DisableInt(UART1);
break;
}
}
}
发送整型数字
发送 9 位字符
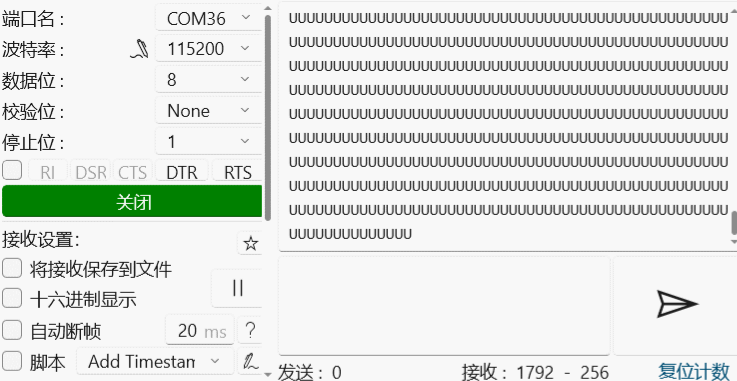
需要注意的是,
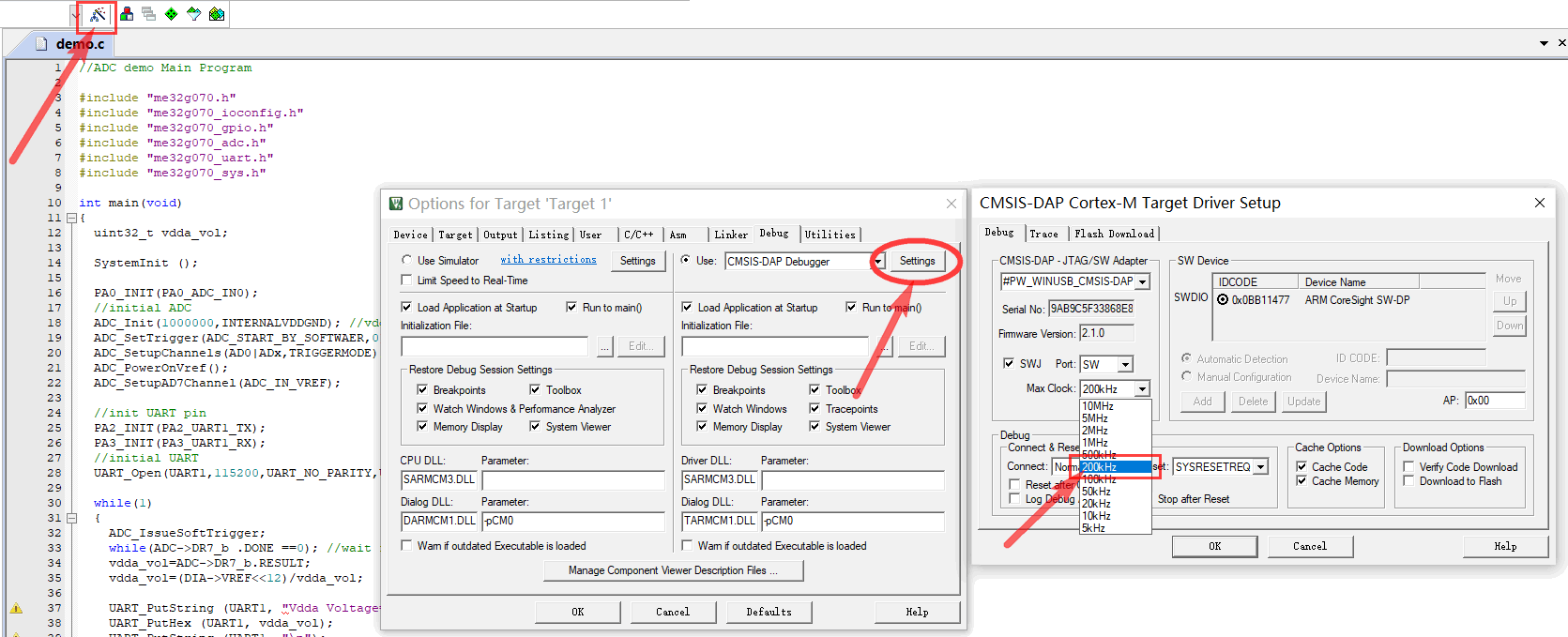
**若调试过程出现报错,则降低通信速率至 **500kHz 以下。
WS2812 与 PWM 实现呼吸灯
ME32G070 系列提供 59 个内部 GPIO 管脚,用户需要根据使用的产品封装来操作 IO 端口。主要的特点有:
16 位定时器/计数器
ME32G070 系列内置 4 个基本功能的 16 位定时器/计数器。
定时器/计数器工作时钟是 PCLK 时钟。关闭 APBCLKEN 寄存器中定时器/计数器的时钟供给可节省系统功耗。
主要功能如下:
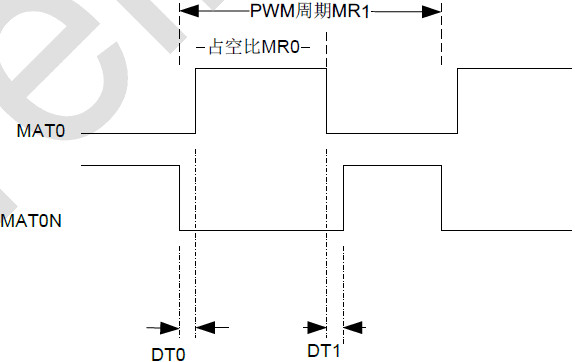
定时器支持匹配输出 MAT0/MAT0N,它可以预留输出 PWM 波形,其中 MAT0N 是 MAT0 的互补输出。
MR0 决定 PWM 波的占空比,MR1 决定 PWM 的周期长度。
PWM 单线数据通信
使用 PWM 来实现单线数据通信传输,在 LED 炫彩灯带有着广泛的应用。
定时器通过两组匹配寄存器和两个 32 位的乒乓寄存器 (PPBUF0/PPBUF1) 轻松实现数据传输而不占用过多CPU资源。

首先,MR0/MR1 控制的 PWM 输出代表0,ALTMR0/ALTMR1 控制的 PWM 输出代表 1。
当在 MAT0 线上要输出 0 时,定时器自动切换到 MR0/MR1 控制的 PWM 输出;而但当在 MAT0 线上要输出 1 时,定时器自动切换到ALTMR0/ALTMR1 控制的 PWM 输出。
当乒乓数据寄存器的数据全部输出后,PWM 输出保持为低电平。
板载 WS2812 模块,根据原理图
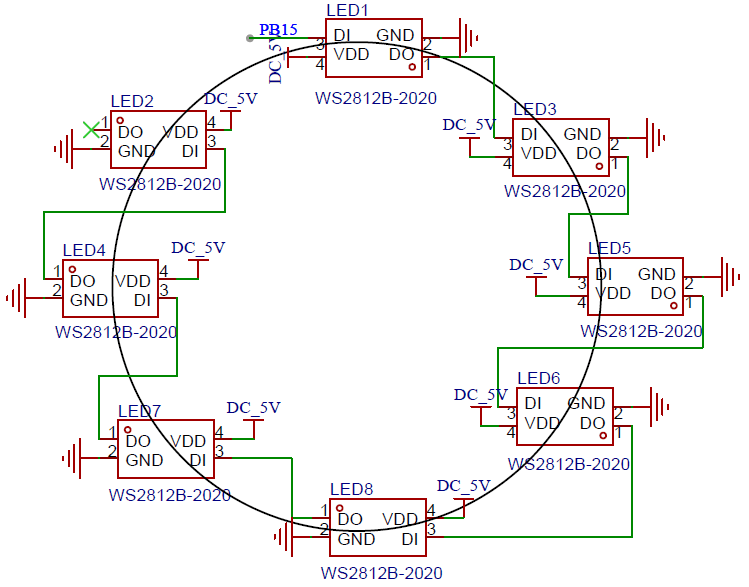
**一线制 WS2812B 由 **PB15 引脚控制
//Btimer one wire demo Main Program
#include "me32g070.h"
#include "me32g070_ioconfig.h"
#include "me32g070_gpio.h"
#include "me32g070_sys.h"
#include "me32g070_timer.h"
#define MAX_LIGHT_NUMBER 8
// R G B//
__align(4) uint8_t org_rgb[3]={0xFF,0x0,0x0};
__align(4) uint8_t rgb[MAX_LIGHT_NUMBER][3];
uint32_t * rgbptr;
uint32_t * rgbendptr;
uint8_t start_color=0;
uint32_t data_index=0;
int main(void)
{
SystemInit ();
////config pll output to 72M
//SYS_PLL_Config(HSI_CLK,72000000);
////main clock switch to external PLL output 72M
//SYS_SelectMainClkSrc(PLL_CLK);
PB15_INIT(PB15_BTIM0_MAT0);//pwm output pin
PC12_INIT(PC12_BTIM0_MAT0);
//btimer 0 init
BTIM_Init(BTIM0, 16000000); //72Mhz,
BTIM_ConfigPWMDataSift(BTIM0, 20, 5, 20, 15);//800K,0->25%,1->75%
NVIC_EnableIRQ(BTIM0_IRQn);
//btimer 1 init
BTIM_Init(BTIM1, 10000); //10Khz,
BTIM_ConfigMatch1(BTIM1, 1000, TIM_MATCH_RESET_COUNTER|TIM_MATCH_TRIGGER_INT); //trigger 10ms interrupt
NVIC_EnableIRQ(BTIM1_IRQn);
TIM_START(BTIM1);
//setup GPIO PB10 work as output
PB->DIR_b.DIR10 =0x1;
PC->DIR_b.DIR4 =0x1;
while(1)
{
//togglre PB10 output
//PB->NOT_b .NOT10 =1;
SYS_Delay(0x4FFFF);
}
}
void BTIM0_IRQHandler(void)
{
rgbptr=BTIM_DataSiftInt(BTIM0, rgbptr, rgbendptr);
//clear BTIMER1 interrupt flag
BTIM_ClearIntFlag(BTIM0);
//PB->NOT_b .NOT10 =1;
}
void BTIM1_IRQHandler(void)
{
uint32_t i;
switch (start_color)
{
case 0: //r->g
org_rgb[0]=org_rgb[0]-51;
org_rgb[1]=org_rgb[1]+51;
if (org_rgb[1]==0xFF)
start_color=1;
break;
case 1: //g->b
org_rgb[1]=org_rgb[1]-51;
org_rgb[2]=org_rgb[2]+51;
if (org_rgb[2]==0xFF)
start_color=2;
break;
case 2: //b->r
org_rgb[2]=org_rgb[2]-51;
org_rgb[0]=org_rgb[0]+51;
if (org_rgb[0]==0xFF)
start_color=0;
break;
}
for (i=MAX_LIGHT_NUMBER-1;i>0;i--)
{
rgb[i][0]=rgb[i-1][0];
rgb[i][1]=rgb[i-1][1];
rgb[i][2]=rgb[i-1][2];
}
rgb[0][0]=org_rgb[0];
rgb[0][1]=org_rgb[1];
rgb[0][2]=org_rgb[2];
rgbptr=(uint32_t *)rgb;
rgbendptr=rgbptr+((MAX_LIGHT_NUMBER*3)>>2);
if ((MAX_LIGHT_NUMBER*3)&0x3)
rgbendptr++;
rgbptr=BTIM_StartDataSift(BTIM0, rgbptr, rgbendptr);
BTIM_ClearIntFlag(BTIM1);
//PC->NOT_b .NOT4 =1;
}
ME32G070 系列可提供独立的事件驱动的脉宽调制模块 PWM。
PWM 模块可配置成 4 对互补输出,8 个独立输出或互补和独立混合的 PWM 信号输出(如3对互补输出,2个独立输出)。同时支持 0~100% 占空比的边沿对齐和中心对齐模式。
PWM 模块使用 16 位计数器,它的精度在边沿对齐时是一个时钟周期,中心对齐时是 2 个时钟周期。时钟周期由PWM 时钟源 PWM_PCLK (系统时钟)、预分频寄存器以及模数值决定。
当 PWM 信号配置成互补输出时,PWM 具有自动死区插入功能。每一个 PWM 输出可被 PWM 发生器、系统定时器、ADC 转换结果、GPIO 输入以及软件控制。非对称的 PWM 还可以允许在每半个周期改变 PWM 占空比而不需要软件参与。
多路的故障信号输入,可以有效的对外部环境进行实时响应。
PWM 重载,输出翻转事件都可触发 A/D 转换,定时器工作,适用于各种复杂应用。
特点
• 独立的脉宽调制模块
• 工作在系统时钟(System Clock)
• 8路PWM信号输出
– 单路独立输出模式
– 互补输出模式
– 混合输出模式
• 互补输出功能
– 单独的死区上升沿/下降沿插入
– 单独的高低脉冲宽度软件补偿
– 中心对齐下的非对称PWM输出
– 单独的高低脉冲输出极性控制
• 边沿对齐PWM输出
• 16 位调制精度
• 半周期重载机制
• 完善的1到16的重载频率控制
• 独立、可软件控制的PWM输出
• 多路故障输入保护
• 输出极性控制
• PWM控制寄存器写保护功能
• 可配置的PWM互补输出信号源
– PWM信号发生器
– 外部GPIO 管脚
– 定时器
– ADC转换
//Btimer one wire demo Main Program
#include "me32g070.h"
#include "me32g070_ioconfig.h"
#include "me32g070_gpio.h"
#include "me32g070_sys.h"
#include "me32g070_timer.h"
static float min(float a, float b, float c)
{
float m;
m = a < b ? a : b;
return (m < c ? m : c);
}
static float max(float a, float b, float c)
{
float m;
m = a > b ? a : b;
return (m > c ? m : c);
}
void rgb2hsv(uint8_t r, uint8_t g, uint8_t b, float *h, float *s, float *v)
{
float red, green ,blue;
float cmax, cmin, delta;
red = (float)r / 255;
green = (float)g / 255;
blue = (float)b / 255;
cmax = max(red, green, blue);
cmin = min(red, green, blue);
delta = cmax - cmin;
/* H */
if(delta == 0)
{
*h = 0;
}
else
{
if(cmax == red)
{
if(green >= blue)
{
*h = 60 * ((green - blue) / delta);
}
else
{
*h = 60 * ((green - blue) / delta) + 360;
}
}
else if(cmax == green)
{
*h = 60 * ((blue - red) / delta + 2);
}
else if(cmax == blue)
{
*h = 60 * ((red - green) / delta + 4);
}
}
/* S */
if(cmax == 0)
{
*s = 0;
}
else
{
*s = delta / cmax;
}
/* V */
*v = cmax;
}
void hsv2rgb(float h, float s, float v, uint8_t *r, uint8_t *g, uint8_t *b)
{
int hi = ((int)h / 60) % 6;
float f = h * 1.0 / 60 - hi;
float p = v * (1 - s);
float q = v * (1 - f * s);
float t = v * (1- (1 - f) * s);
switch (hi){
case 0:
*r = 255 * v;
*g = 255 * t;
*b = 255 * p;
break;
case 1:
*r = 255 * q;
*g = 255 * v;
*b = 255 * p;
break;
case 2:
*r = 255 * p;
*g = 255 * v;
*b = 255 * t;
break;
case 3:
*r = 255 * p;
*g = 255 * q;
*b = 255 * v;
break;
case 4:
*r = 255 * t;
*g = 255 * p;
*b = 255 * v;
break;
case 5:
*r = 255 * v;
*g = 255 * p;
*b = 255 * q;
break;
}
}
//zzz wave
const uint16_t index_wave[300] = {
1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 3, 3, 3, 3, 3, 3, 3, 3, 3, 4,
4, 4, 4, 4, 4, 4, 5, 5, 5, 5, 5, 6, 6, 6, 6, 6, 7, 7, 7, 7, 8, 8, 8, 9, 9, 9, 10, 10, 10, 11, 11, 12, 12,
13, 13, 14, 14, 15, 15, 16, 16, 17, 18, 18, 19, 20, 20, 21, 22, 23, 24, 25, 25, 26, 27, 28, 30, 31, 32, 33,
34, 36, 37, 38, 40, 41, 43, 45, 46, 48, 50, 52, 54, 56, 58, 60, 62, 65, 67, 70, 72, 75, 78, 81, 84, 87, 90,
94, 97, 101, 105, 109, 113, 117, 122, 126, 131, 136, 141, 146, 152, 158, 164, 170, 176, 183, 190, 197, 205,
213, 221, 229, 238, 247, 256, 256, 247, 238, 229, 221, 213, 205, 197, 190, 183, 176, 170, 164, 158, 152, 146,
141, 136, 131, 126, 122, 117, 113, 109, 105, 101, 97, 94, 90, 87, 84, 81, 78, 75, 72, 70, 67, 65, 62, 60, 58,
56, 54, 52, 50, 48, 46, 45, 43, 41, 40, 38, 37, 36, 34, 33, 32, 31, 30, 28, 27, 26, 25, 25, 24, 23, 22, 21, 20,
20, 19, 18, 18, 17, 16, 16, 15, 15, 14, 14, 13, 13, 12, 12, 11, 11, 10, 10, 10, 9, 9, 9, 8, 8, 8, 7, 7, 7, 7, 6,
6, 6, 6, 6, 5, 5, 5, 5, 5, 4, 4, 4, 4, 4, 4, 4, 3, 3, 3, 3, 3, 3, 3, 3, 3, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2,
2, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1,1};
// R G B//
__align(4) uint8_t rgb[4]={0x0,0x08F,0x0,0x0};
uint32_t * rgbptr;
uint32_t data_index=0;
uint8_t color_r,color_g,color_b;
uint8_t initial_color_r,initial_color_g,initial_color_b;
float color_h,color_s,color_v,temp_v;
uint8_t pangpang=0;
int main(void)
{
SystemInit ();
////config pll output to 72M
//SYS_PLL_Config(HSI_CLK,72000000);
////main clock switch to external PLL output 72M
//SYS_SelectMainClkSrc(PLL_CLK);
PB15_INIT(PB15_BTIM0_MAT0);//pwm output pin
rgbptr=(uint32_t*)rgb;
//btimer 0 init
BTIM_Init(BTIM0, 16000000); //16Mhz,
BTIM_ConfigPWMDataSift(BTIM0, 20, 5, 20, 15);//800K,0->25%,1->75%
NVIC_EnableIRQ(BTIM0_IRQn);
//btimer 1 init
BTIM_Init(BTIM1, 10000); //10Khz,
BTIM_ConfigMatch1(BTIM1, 100, TIM_MATCH_RESET_COUNTER|TIM_MATCH_TRIGGER_INT); //trigger 10ms interrupt
NVIC_EnableIRQ(BTIM1_IRQn);
rgb2hsv(rgb[0],rgb[1], rgb[2], &color_h,&color_s,&color_v);
temp_v=(color_v*(float)index_wave[data_index])/256;
hsv2rgb(color_h, color_s, temp_v, &rgb[0],&rgb[1], &rgb[2]);
BTIM0->PPBUF0 =SYS_EndianExChange(*rgbptr);
TIM_START(BTIM0);
TIM_START(BTIM1);
//setup GPIO PB10 work as output
//PB->DIR_b.DIR10 =0x1;
//PC->DIR_b.DIR4 =0x1;
while(1)
{
//togglre PB10 output
//PB->NOT_b .NOT10 =1;
SYS_Delay(0x4FFFF);
}
}
void BTIM0_IRQHandler(void)
{
if ((BTIM0->IR_b.BUF0BUSY ==0)&&(BTIM0->IR_b .BUF1BUSY ==0))
{
TIM_STOP(BTIM0);
}
BTIM_ClearIntFlag(BTIM0);
}
void BTIM1_IRQHandler(void)
{
data_index++;
if (data_index>299)
{
data_index=0;
PC->NOT_b .NOT4 =1;
}
temp_v=(color_v*(float)index_wave[data_index])/256;
hsv2rgb(color_h, color_s, temp_v, &rgb[0],&rgb[1], &rgb[2]);
pangpang++;
pangpang=pangpang&1;
if (pangpang)
BTIM0->PPBUF1 =SYS_EndianExChange(*rgbptr);
else
BTIM0->PPBUF0 =SYS_EndianExChange(*rgbptr);
TIM_START(BTIM0);
//clear BTIMER1 interrupt flag
BTIM_ClearIntFlag(BTIM1);
//PC->NOT_b .NOT4 =1;
}

ME32G070 提供有 12 位的 ADC 转换器,
主要功能如下:
• 最高2M Hz转换率,12位的A/D转换器
• 支持16个外部AD通道和3个内部信号采样转换
• 支持4路差分输入
• 模块支持低功耗掉电
• ADC测量范围0 ~ VDDA或内部参考电压(缺省值~2V,缺省设置实际值看芯片器件信息(DIA)的VREF)
• 支持突发模式ADC转换
• 可配置ADC转换触发源-输入管脚电平转换或定时器匹配信号
• 8个转换结果存储寄存器,减少中断负担
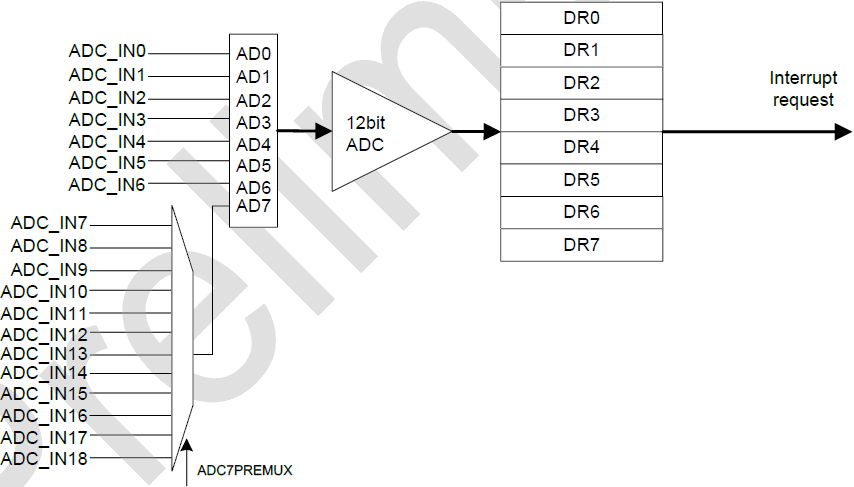
每个 AD 通道有固定的数据寄存器用于存储转换结果。用户简单使能通道位就可以配置需要的通道进行转换,并把 12 位的转换结果分别保存在对应个寄存器中。一次触发,A/D 转换通道扫描按照从 DR0 到 DR7 次序。
芯片外部输入 ADC_IN0~ ADC_IN6 直接对应 AD0~AD6 通道。
芯片外部输入 ADC_IN7~ ADC_IN18 要通过模拟开关连接到 AD7。
ADC 触发转换模式
若 ADC 的触发转换被触发,所有选中的 A/D 通道都会被转换一次。在完成对所有通道转换之前,不能被中断。若此时发出软件命令或有事件触发 ADC 转换,那么该次 ADC 转换请求会被忽略掉。
ADC转换触发事件可以是软件请求,定时器捕捉 (CAP) 或匹配(MAT)信号,还可以是PWM事件。在定时器捕捉 (CAP) 或匹配(MAT)作触发信号时,信号边沿控制由 CR 寄存器的 EDGE 位决定。
** ADC 在模拟信号转化为数字信号的过程中需要经过****采样**、保持、量化和编码。采样和保持在采样保持电路中完成,而量化和编码步骤则在 ADC 中完成。
//ADC demo Main Program
//For ADC_IN7~ADC_IN18, AD7 premux channel must be setup before issue the trigger
#include "me32g070.h"
#include "me32g070_ioconfig.h"
#include "me32g070_gpio.h"
#include "me32g070_adc.h"
#include "me32g070_uart.h"
#include "me32g070_sys.h"
int main(void)
{
SystemInit ();
//inital ADC pin
PB11_INIT (PB11_ADC_IN15);
//initial ADC
ADC_Init(1000000,INTERNALVDDGND); //vdd as adc reference
//ADC_Init(1000000,EXTVREFPGND); //vdda/vrefp as adc reference
//ADC_Init(200000,INTERNALADCVREFGND); //apply internal vref as adc reference, ADC convert rate must be lower than 200K
ADC_SetTrigger(ADC_START_BY_SOFTWAER,0);
ADC_SetupChannels(ADx,TRIGGERMODE);
ADC_SetupAD7Channel(ADC_IN15);
//init UART pin
PA2_INIT(PA2_UART1_TX);
PA3_INIT(PA3_UART1_RX);
//initial UART
UART_Open(UART1,115200,UART_NO_PARITY,UART_TRIGGER_LEVEL_1_BYTE);
while(1)
{
ADC_IssueSoftTrigger;
while(ADC->DR7_b .DONE ==0); //wait for AD7 done
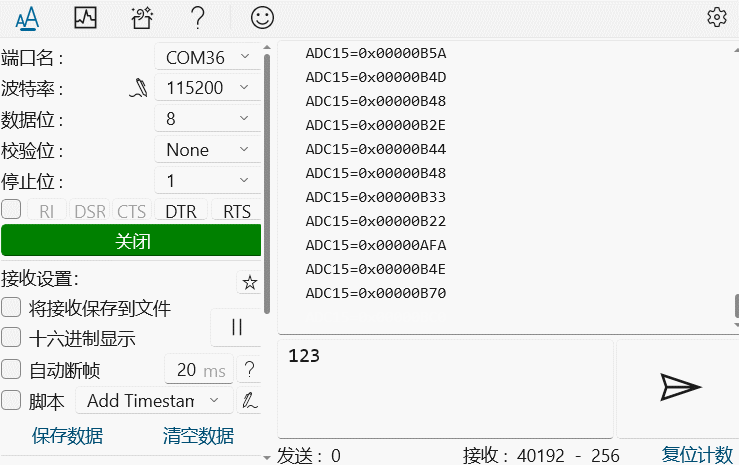
UART_PutString (UART1, " ADC15=0x");
UART_PutHex (UART1, ADC->DR7_b.RESULT);
UART_PutString (UART1, "\n");
}
}
ADC读取引脚电平并串口发送
//ADC demo Main Program
#include "me32g070.h"
#include "me32g070_ioconfig.h"
#include "me32g070_gpio.h"
#include "me32g070_adc.h"
#include "me32g070_uart.h"
#include "me32g070_sys.h"
int main(void)
{
uint32_t vdda_vol;
SystemInit ();
PA0_INIT(PA0_ADC_IN0);
//initial ADC
ADC_Init(1000000,INTERNALVDDGND); //vdd as adc reference
ADC_SetTrigger(ADC_START_BY_SOFTWAER,0);
ADC_SetupChannels(AD0|ADx,TRIGGERMODE);
ADC_PowerOnVref();
ADC_SetupAD7Channel(ADC_IN_VREF);
//init UART pin
PA2_INIT(PA2_UART1_TX);
PA3_INIT(PA3_UART1_RX);
//initial UART
UART_Open(UART1,115200,UART_NO_PARITY,UART_TRIGGER_LEVEL_1_BYTE);
while(1)
{
ADC_IssueSoftTrigger;
while(ADC->DR7_b .DONE ==0); //wait for AD7 done
vdda_vol=ADC->DR7_b.RESULT;
vdda_vol=(DIA->VREF<<12)/vdda_vol;
UART_PutString (UART1, "Vdda Voltage=0x");
UART_PutHex (UART1, vdda_vol);
UART_PutString (UART1, "\n");
}
}

ADC 7输入选择寄存器(ADC7PREMUX) 描述
0x0: ADC 通道7选择外部ADC_IN7管脚输入
0x1: ADC 通道7选择外部ADC_IN8管脚输入
0x2: ADC 通道7选择外部ADC_IN9管脚输入
0x3: ADC 通道7选择外部ADC_IN10管脚输入
0x4: ADC 通道7选择外部ADC_IN11管脚输入
0x5: ADC 通道7选择内部VDDH分压
0x6: ADC 通道7选择ADC Vref电压
0x7: ADC 通道7选择VDD15(缺省值)
0x8: ADC 通道7选择外部ADC_IN15管脚输入
0x9: ADC 通道7选择外部ADC_IN16管脚输入
0xA: ADC 通道7选择外部ADC_IN17管脚输入
0xB: ADC 通道7选择外部ADC_IN18管脚输入
其他,保留
//ADC demo Main Program
#include "me32g070.h"
#include "me32g070_ioconfig.h"
#include "me32g070_gpio.h"
#include "me32g070_adc.h"
#include "me32g070_uart.h"
#include "me32g070_sys.h"
int main(void)
{
SystemInit ();
//inital ADC pin
PA0_INIT (PA0_ADC_IN0);
PA1_INIT (PA1_ADC_IN1);
PA2_INIT (PA2_ADC_IN2);
PA3_INIT (PA3_ADC_IN3);
PA4_INIT (PA4_ADC_IN4);
PA5_INIT (PA5_ADC_IN5);
PA6_INIT (PA6_ADC_IN6);
PA7_INIT (PA7_ADC_IN7);
//initial ADC
ADC_Init(1000000,INTERNALVDDGND); //vdd as adc reference
//ADC_Init(1000000,EXTVREFPGND); //vdda/vrefp as adc reference
//ADC_Init(200000,INTERNALADCVREFGND); //apply internal vref as adc reference, ADC convert rate must be lower than 200K
ADC_SetTrigger(ADC_START_BY_SOFTWAER,0);
ADC_SetupChannels(AD0|AD1|AD2|AD3|AD4|AD5|AD6|ADx,TRIGGERMODE);
//ADC_SetupChannels(AD5,TRIGGERMODE);
//init UART pin
PA2_INIT(PA2_UART1_TX);
PA3_INIT(PA3_UART1_RX);
//initial UART
UART_Open(UART1,115200,UART_NO_PARITY,UART_TRIGGER_LEVEL_1_BYTE);
while(1)
{
ADC_IssueSoftTrigger;
while(ADC->DR7_b .DONE ==0); //wait for AD7 done
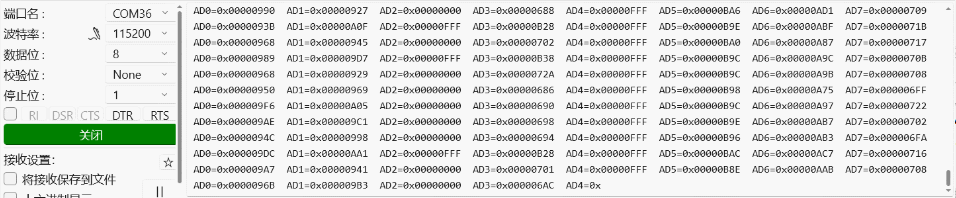
UART_PutString (UART1, "AD0=0x");
UART_PutHex (UART1, ADC->DR0_b.RESULT);
UART_PutString (UART1, " AD1=0x");
UART_PutHex (UART1, ADC->DR1_b.RESULT);
UART_PutString (UART1, " AD2=0x");
UART_PutHex (UART1, ADC->DR2_b.RESULT);
UART_PutString (UART1, " AD3=0x");
UART_PutHex (UART1, ADC->DR3_b.RESULT);
UART_PutString (UART1, " AD4=0x");
UART_PutHex (UART1, ADC->DR4_b.RESULT);
UART_PutString (UART1, " AD5=0x");
UART_PutHex (UART1, ADC->DR5_b.RESULT);
UART_PutString (UART1, " AD6=0x");
UART_PutHex (UART1, ADC->DR6_b.RESULT);
UART_PutString (UART1, " AD7=0x");
UART_PutHex (UART1, ADC->DR7_b.RESULT);
UART_PutString (UART1, "\n");
}
}
本文通过具体工程案例,简要介绍和测评了敏矽微 ME32G070 单片机的串口通信、PWM 和 ADC功能,为后面的开发和 DIY 项目打下基础。
更多回帖

