1. 对于ADS127L11的DRDY引脚(Pin 14),如果不需要使用,可以将其悬空。悬空意味着该引脚没有连接到任何电路,因此不会影响其他引脚的功能。但是,建议在设计时尽量避免悬空引脚,因为它们可能会导致不稳定或意外的行为。如果可能的话,可以考虑将DRDY引脚连接到一个稳定的电压源(例如地或电源电压)以确保其稳定。
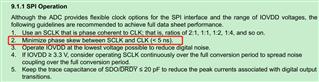
2. 手册建议IOVDD脚使用1.8V,但如果您使用3.3V,ADC性能可能会受到影响。使用3.3V可能会导致ADC的精度和线性度降低,但根据您的应用需求,这可能不是一个问题。您提到的正常使用频率≤100KHz,SPI时钟可以设置在2MHz至4.5MHz之间,这应该不会给ADC带来额外的噪声耦合。但是,为了确保最佳性能,建议遵循手册中的建议使用1.8V。
3. 对于SCLK和CLK的相位一致性,手册中提到了几个比例关系。1:4之后,可以尝试1:8。外部时钟CLK为25.6MHz时,按比例计算SCLK可能带有小数。在这种情况下,SCLK在这个比例附近应该是可以接受的。例如,1:4时,SCLK为6.4MHz,那么使用6MHz或7MHz应该是可以的。但是,为了确保最佳性能和稳定性,建议遵循手册中推荐的比例关系。
4. 相位偏差的保证通常依赖于硬件设计和时钟源的稳定性。为了确保SCLK和CLK之间的相位一致性,可以使用一个稳定的时钟源,并确保SCLK和CLK之间的时钟分配网络具有低延迟和低偏斜。此外,可以使用相位锁定环(PLL)或其他时钟同步技术来进一步减少相位偏差。在实际应用中,可能需要进行一些实验和调整以找到最佳的时钟设置。
1. 对于ADS127L11的DRDY引脚(Pin 14),如果不需要使用,可以将其悬空。悬空意味着该引脚没有连接到任何电路,因此不会影响其他引脚的功能。但是,建议在设计时尽量避免悬空引脚,因为它们可能会导致不稳定或意外的行为。如果可能的话,可以考虑将DRDY引脚连接到一个稳定的电压源(例如地或电源电压)以确保其稳定。
2. 手册建议IOVDD脚使用1.8V,但如果您使用3.3V,ADC性能可能会受到影响。使用3.3V可能会导致ADC的精度和线性度降低,但根据您的应用需求,这可能不是一个问题。您提到的正常使用频率≤100KHz,SPI时钟可以设置在2MHz至4.5MHz之间,这应该不会给ADC带来额外的噪声耦合。但是,为了确保最佳性能,建议遵循手册中的建议使用1.8V。
3. 对于SCLK和CLK的相位一致性,手册中提到了几个比例关系。1:4之后,可以尝试1:8。外部时钟CLK为25.6MHz时,按比例计算SCLK可能带有小数。在这种情况下,SCLK在这个比例附近应该是可以接受的。例如,1:4时,SCLK为6.4MHz,那么使用6MHz或7MHz应该是可以的。但是,为了确保最佳性能和稳定性,建议遵循手册中推荐的比例关系。
4. 相位偏差的保证通常依赖于硬件设计和时钟源的稳定性。为了确保SCLK和CLK之间的相位一致性,可以使用一个稳定的时钟源,并确保SCLK和CLK之间的时钟分配网络具有低延迟和低偏斜。此外,可以使用相位锁定环(PLL)或其他时钟同步技术来进一步减少相位偏差。在实际应用中,可能需要进行一些实验和调整以找到最佳的时钟设置。

 举报
举报
 ,如果用了3.3V会大大折扣ADC性能吗?我比较倾向用3.3V,正常使用的频率<=100Khz,,SPI时钟可以设置慢一点,2Mhz~4.5Mhz。IOVDD用了3.3V应该也不会给ADC带来额外的噪声耦合吧。
,如果用了3.3V会大大折扣ADC性能吗?我比较倾向用3.3V,正常使用的频率<=100Khz,,SPI时钟可以设置慢一点,2Mhz~4.5Mhz。IOVDD用了3.3V应该也不会给ADC带来额外的噪声耦合吧。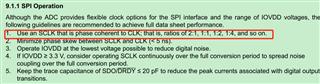
 这个相位偏差怎么保证呢。使用的时候还得用设备实际测量SCLK和CLK的相位吗。好像严格按照比例关系是不是就保证了相位<5ns,如果保证不了这个相位唯有什么后果呢
这个相位偏差怎么保证呢。使用的时候还得用设备实际测量SCLK和CLK的相位吗。好像严格按照比例关系是不是就保证了相位<5ns,如果保证不了这个相位唯有什么后果呢



