使用mcsdk配置电机控制编码器如图,能够同时选择hall sensors编码器和 quadrature encoder编码器
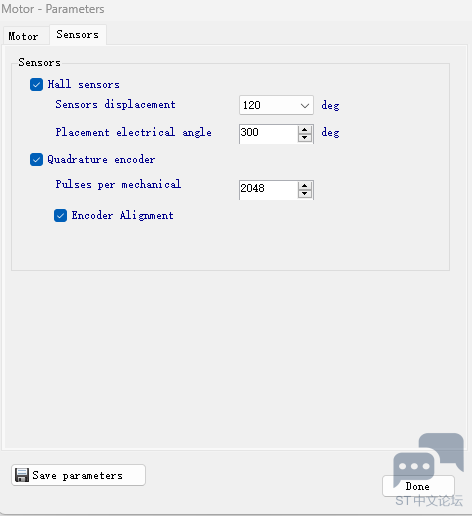
并且
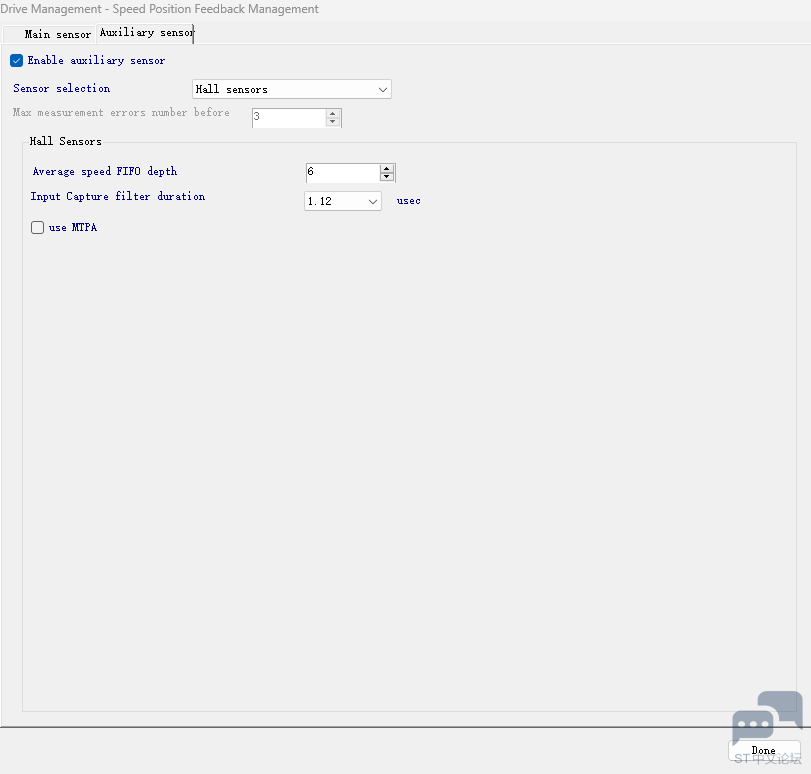
可以在传感器选择enable auxiliary sensor传感器
但是程序生成后存在错误,如图所示 声明的中断函数冲突了,
tim3和tim5同时被调用

我本意是想使用两个传感器,霍尔编码器做初始定位,增量式编码器做速度和角度计算,我想请问一下
1上面的问题如何解决?
2如何使用mcsdk配置两个传感器,霍尔编码器做初始定位,增量式编码器做速度和角度计算?
3mcsdk允许配置两个传感器,本意是什么?是和我一样的思路霍尔定位增量计算,还是说两个编码器共同使用有什么好处,一个坏了另一个能替代?


 举报
举报



