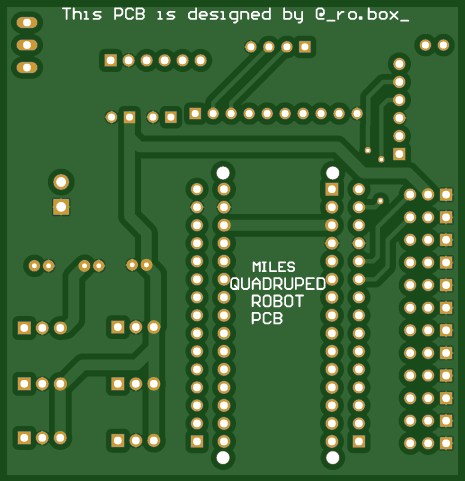
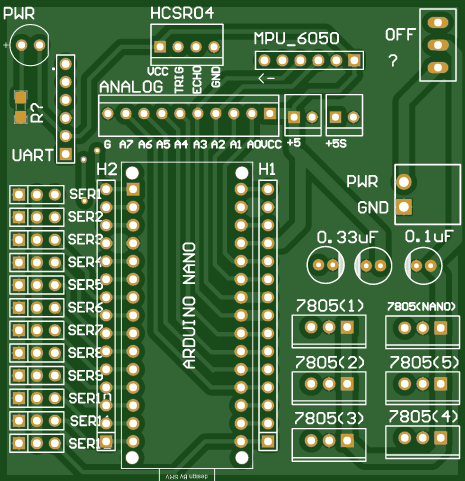
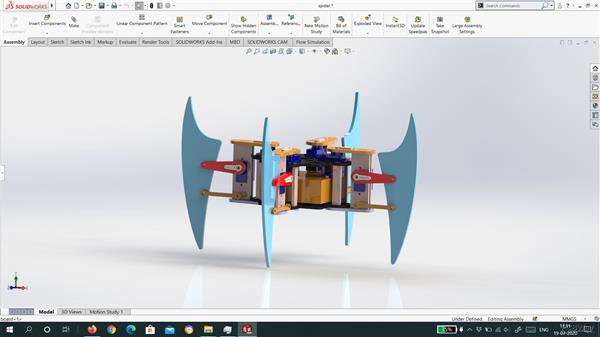
“迈尔斯”开源四足蜘蛛机器人-gerber.zip (2022-8-9 08:00 上传)
36.45 KB, 下载次数: 5
更多回帖
无需安装、支持浏览器和手机在线查看、实时共享
登录更多精彩功能!