一、原理概述
RT-Thread 是一款嵌入式实时操作系统(RTOS),同时也是一款优秀的物联网操作系统,相对于裸机的轮询调度算法,它使用的线程(任务)调度算法是基于优先级的全抢占式多线程调度算法,该算法大大增强了系统的实时响应,大大扩展了系统的应用场景。
该调度算法在每次调度任务时,总会选择优先级最高的就绪任务执行,保证优先级高的任务得到最及时的响应。
下面,我们来详细讲解该调度算法的原理和具体实现。
注:本文基于 RT-Thread 的版本为 RT-Thread v4.0.5 released, 其发布于 2021-12-31。
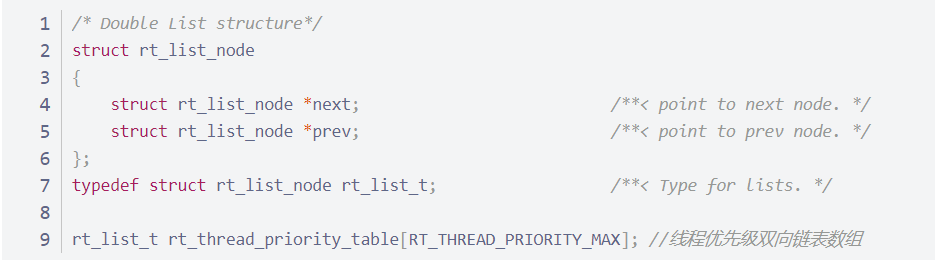
首先,RT-Thread 中定义了一个双向链表数组 rt_thread_priority_table,用来挂载就绪的线程,代码如下所示:
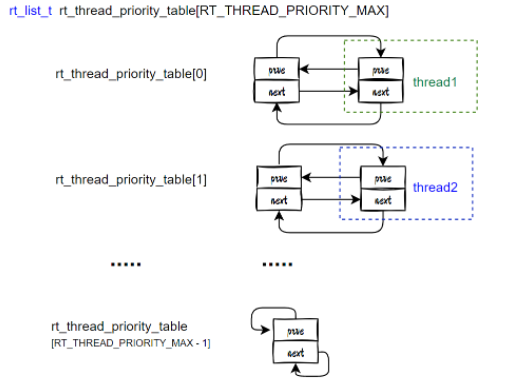
其实实现的就是如下的结构:
其中 RT_THREAD_PRIORITY_MAX 代表的是该系统配置的优先级数目,RT-Thread 的调度算法只支持 RT_THREAD_PRIORITY_MAX <= 256,这个数目绝对够绝大多数的项目需求了。而 rt_thread_priority_table[RT_THREAD_PRIORITY_MAX] 这个数组从 0 到 RT_THREAD_PRIORITY_MAX-1的数组元素则是分别对应任务的优先级从 0 到 RT_THREAD_PRIORITY_MAX-1。
当有线程就绪时,线程会挂载到其优先级对应的线程优先级表
(rt_thread_priority_table)元素的位置,假设现在有两个线程,分别是优先级为 0 的 thread1 和优先级为 1 的 thread2,当它们都进入就绪状态等待调度时,效果如下:
此时问题来了,当任务们都进入就绪状态,挂载在这个线程优先级表(rt_thread_priority_table)上时,我们如何查找到所有就绪任务中拥有最高优先级的那个呢?
首先,我们想到可以从线程优先级表(rt_thread_priority_table)的位置 0 开始查找,一旦发现哪个位置有挂载线程,则说明该优先级下有对应的任务就绪了,执行该线程即可。当下一次调度任务时,又按刚才的步骤从 0 开始查找即可,这不失为一个能解决问题的方法。
但是细细想来,如果就绪任务中的最高优先级比较靠后,这样的查找算法几乎要遍历一遍,明显很耗时间,一点都配不上实时操作系统(RTOS)中 “实时”这两个字。
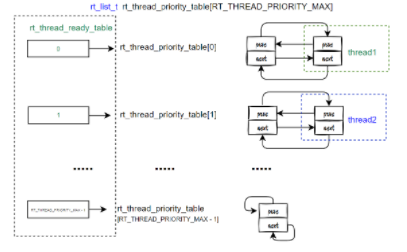
为了更高效地调度任务,RT-Thread 使用了线程就绪表(rt_thread_ready_table)映射来实现的,简单的说,就是维护一个记录已就绪任务的表,通过查找这个表,我们就能够知道当前就绪任务中最高优先级的任务是哪一个,然后直接执行该优先级下的任务即可。
具体来说,这个线程就绪表(rt_thread_ready_table)的位数和优先级是一一对应的,当这个表的某一位为1时,代表这个优先级下有任务就绪。
RT-Thread 作为多任务调度系统,各个任务由于外部条件的触发,要经常在就绪状态和非就绪状态中切换(对应到数据结构就是:任务的双向指针插入或者脱离 rt_thread_priority_table ),所以作为映射的线程就绪表(rt_thread_ready_table)也要根据任务们的状态随时更新,对应到这个表,无非就是当某个优先级下没有任务时,将这个表对应的位清0,当有任务挂载在该优先级下时,将这个就绪表的位置1。
我们通过这个表,能够在 O(1) 的时间复杂度上找到最高优先级的任务,实现了快速地调度最高优先级任务。在切换任务的状态时,实时更新这张表的内容,确保线程就绪表(rt_thread_ready_table)和线程优先级表(rt_thread_priority_table)相互对应的结果是正确的。
接下来到了 show the code 时间了,可能会耗点脑细胞了。
二、实现细节
先来看看线程就绪表(rt_thread_ready_table)的代码实现形式:
根据 RT_THREAD_PRIORITY_MAX 这个宏定义的不同,线程就绪表(rt_thread_ready_table)的实现方式有两种:
当优先级数量小于等于 32 时,定义一个 32 位的变量 rt_thread_ready_priority_group 即可实现线程就绪表,实现起来最简单,省空间、省时间(查找效率会提高)。所以如果不需要太多的优先级,建议优先级数量设置到小于等于 32。
对应于RT_THREAD_PRIORITY_MAX > 32的情况,你可以想象目的是想要一个数据长度为 256 位的变量,奈何目前跑 RTOS 的MCU大多是 32 位的,所以这里只能采取这种折中的方式,相当于是双重映射实现出了那个梦寐以求的数据长度为 256 位的变量。
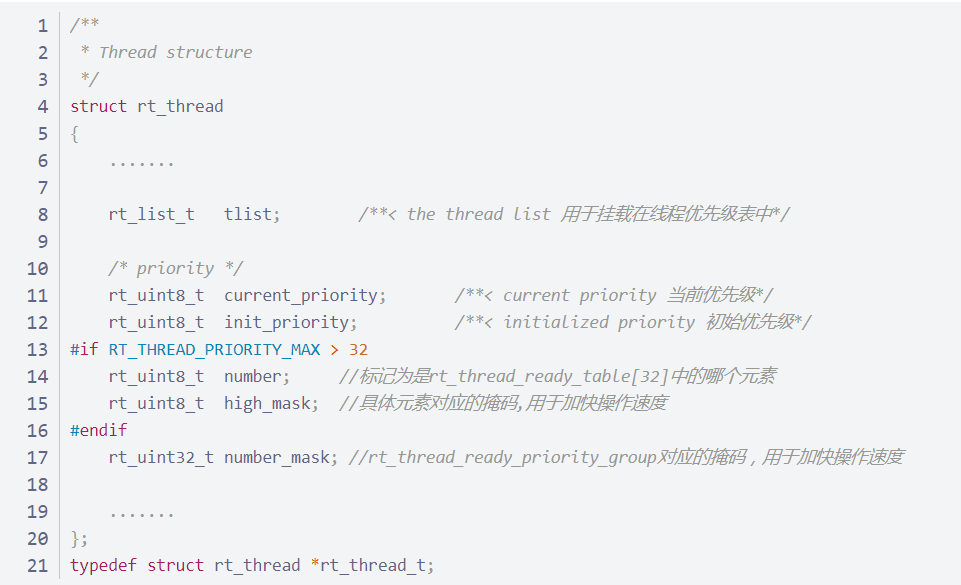
在谈到具体如何使用、更新线程就绪表(rt_thread_ready_table)之前,看看具体某个优先级任务的结构体有哪些是和调度算法相关的。如下是任务线程的结构体的定义,我将无关的变量删除,只留下所有相关的变量:
简单提及一个这里的掩码的作用,母的是为了方便后面对线程优先级就绪表进行操作。举个例子,假设有一个优先级(priority)为 20 的任务,那么其对应的线程结构的掩码情况如下:
对于 RT_THREAD_PRIORITY_MAX <= 32:
话说回来,为什么要设置 number_mask 这个变量呢?遇到要使用这个变量的时候直接使用 1<
对于 RT_THREAD_PRIORITY_MAX > 32,原理是一样的,就不赘述了。
RT-Thread是如何初始化上述的变量的呢?
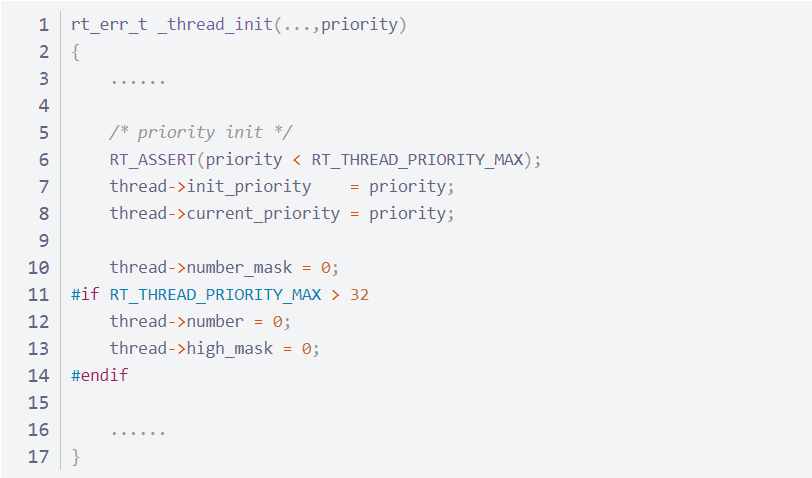
在线程的初始化函数中(无论是动态创建线程还是静态初始化线程),根据传入的优先级参数进行操作,主要是用作初始化:
当启动线程时,更新线程对应的数据:
一切准备就绪,接下来看看当调度器调度任务时是怎么操作优先级就绪表的。
2.1、如何查找当前就绪任务中的最高优先级
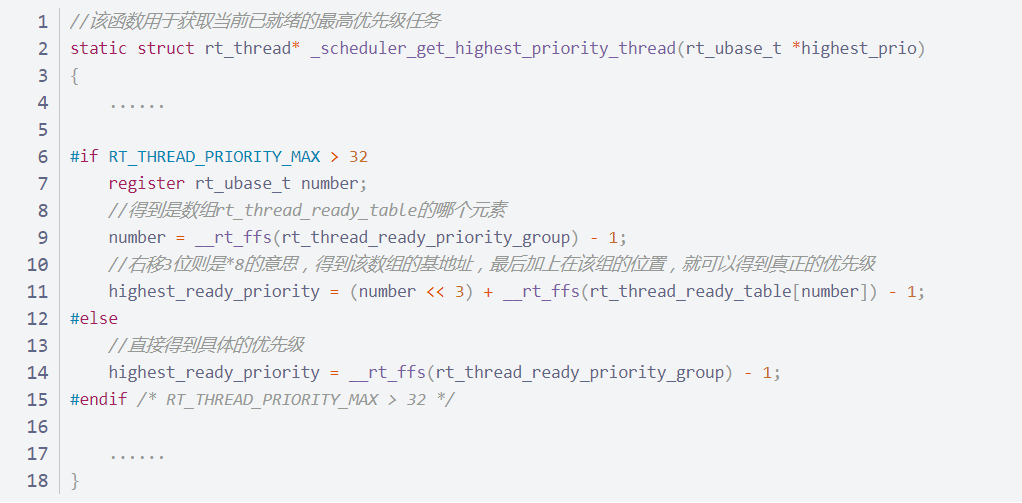
其实就是查找优先级就绪表最靠近前面的1所处的位置,每次进行任务调度的时候会用到这个表去获得最高优先级,然后根据最高优先级得到此时就绪的最高优先级线程。
重点说一下这里的 __rt_ffs() 函数,该函数实现的功能:得到传入的 32 位变量中 1 所在的最低位位置,也就是所谓的实现查找字节最低非0位。该函数能够在 O(1)的时间复杂度下实现查找到最低优先级,其使用的是位图查找算法,还是挺精妙的。
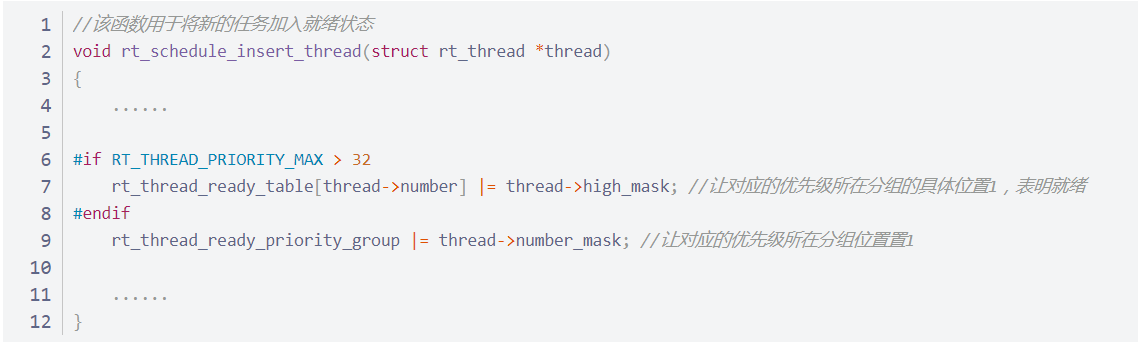
2.2、当任务就绪时,如何更新线程就绪列表?
如果某个任务就绪,根据该任务的优先级更新线程就绪表rt_thread_ready_table对应位置。
2.3、当任务脱离就绪状态时,如何更新线程就绪列表?
当某个任务脱离就绪状态时(被删除、挂起等),我们也需要更新更新线程就绪表rt_thread_ready_table,由于RT-Thread支持多个任务可以拥有相同的优先级,所以我们在更新线程就绪表rt_thread_ready_table需要考虑该优先级下是否有别的任务还处于就绪状态。
三、一些有用的建议
由于代码实现的原因,RT_THREAD_PRIORITY_MAX必须配置为小于等于 256,否则系统工作会异常。
除了空闲任务,每一个优先级任务都应该有让出CPU使用权的操作(暂时脱离就绪状态,比如使用延时),让优先级更低的线程能够有机会执行。
如果使用的芯片的资源有限(RAM、ROM等),建议尽量将 RT_THREAD_PRIORITY_MAX 设置小一点,最好是小于等于 32,不仅省资源,还能加快调度速度。