上一篇,Air551G双频定位
开发板 通过串口连接电脑,读取了GPS数据,并保留在文件
《0307_155837_COM07.txt 》中,
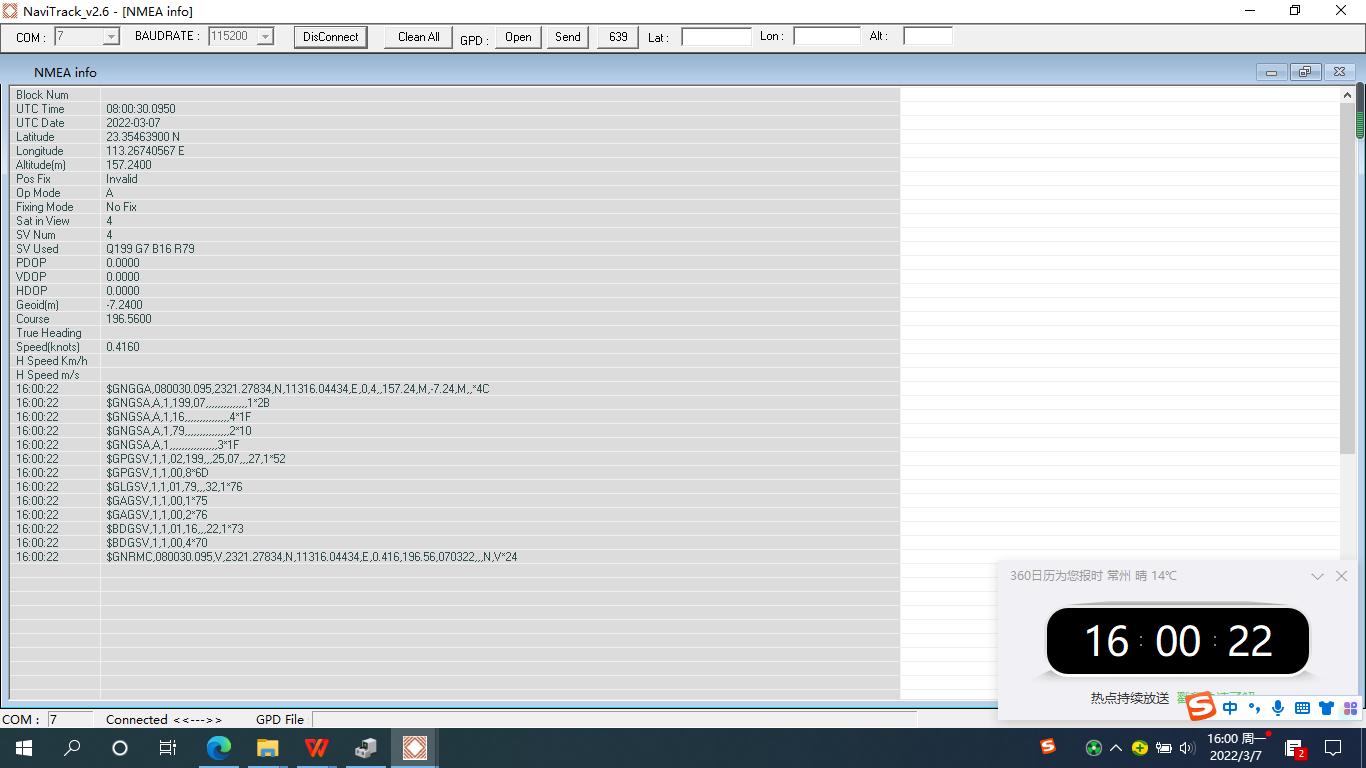
解读GPS信息:
模块支持NMEA 0183 V4.1协议:
GGA: 时间,位置,卫星数量
GLL: 精度,纬度,UTC时间
GSA: GPS 接收机操作模式,
GSV: 可见GPS 卫星信息,仰角,方位角,信噪比
RMP: 时间,日期,位置,速度
VTG: 地面速度信息
采用RMP方式, 可解读到 时间,日期,位置,速度 信息。
GNRMC 定位信息,数据结构:
$GPRMC,<1>,<2>,<3>,<4>,<5>,<6>,<7>,<8>,<9>,<10>,<11>,<12>*hh
<1> UTC 时间,hhmmss(时分秒)格式
<2> 定位状态,A=有效定位,V=无效定位
<3>纬度ddmm.mmmm(度分)格式(前面的0也将被传输)
<4> 纬度半球N(北半球)或S(南半球)
<5>经度dddmm.mmmm(度分)格式(前面的0也将被传输)
<6> 经度半球E(东经)或W(西经)
<7>地面速率(000.0~999.9节,前面的0也将被传输)
<8>地面航向(000.0~359.9度,以真北为参考基准,前面的0也将被传输)
<9> UTC 日期,ddmmyy(日月年)格式
<10>磁偏角(000.0~180.0度,前面的0也将被传输)
<11> 磁偏角方向,E(东)或W(西)
<12>模式指示(仅NMEA01833.00版本输出,A=自主定位,D=差分,E=估算,N=数据无效)
部分解析代码
以下部分解析代码可供参考:
1.1 创建Air551G_GPS数据结构体:
typedef GPS_data struct{
double la
titude; //经度
double longitude; //纬度
int latitude_Degree; //度
int latitude_Cent; //分
int latitude_Second; //秒
int longitude_Degree; //度
int longitude_Cent; //分
int longitude_Second; //秒
float speed; //速度
float direction; //航向
float height; //海拔高度
int satellite;
U8 NS;
U8 EW;
DATE_TIME D;
}Air551G_GPS_INFO;
1.2 时间结构体:
typedef struct{
int year;
int month;
int day;
int hour;
int minute;
int second;
}DATE_TIME;
1.3 逗号位置函数
int GetComma(int num,char *str){
int i,j=0;
int len=strlen(str);
for(i=0;i<len;i++)
{
IF(str==',')
{
j++;
}
if(j==num)
return i+1;
}
return 0;
}
1.4 转换为double型
double Get_Double_Number
(char *s){
char buf[128];
int i;
double rev;
i=GetComma(1,s);
strncpy(buf,s,i);
buf=0;
rev=atof(buf);
return rev;
}
1.5 解析GPRMC数据
int GPS_RMC_Parse(char *line, Air551G_GPS_INFO *GPS)
{
U8 ch, status, tmp;
float lati_cent_tmp, lati_second_tmp;
float long_cent_tmp, long_second_tmp;
float speed_tmp;
char *buf = line;
ch = buf[5];
status = buf[GetComma(2, buf)];
if (ch == 'C') //如果第五个字符是C,($GPRMC)
{
if (status == 'A') //如果数据有效,则分析
{
GPS->NS = buf[GetComma(4, buf)];
GPS->EW = buf[GetComma(6, buf)];
GPS->latitude = Get_Double_Number(&buf[GetComma(3, buf)]);
GPS->longitude = Get_Double_Number(&buf[GetComma(5, buf)]);
GPS->latitude_Degree = (int)GPS->latitude / 100; //分离纬度
lati_cent_tmp = (GPS->latitude - GPS->latitude_Degree * 100);
GPS->latitude_Cent = (int)lati_cent_tmp;
lati_second_tmp = (lati_cent_tmp - GPS->latitude_Cent) * 60;
GPS->latitude_Second = (int)lati_second_tmp;
GPS->longitude_Degree = (int)GPS->longitude / 100; //分离经度
long_cent_tmp = (GPS->longitude - GPS->longitude_Degree * 100);
GPS->longitude_Cent = (int)long_cent_tmp;
long_second_tmp = (long_cent_tmp - GPS->longitude_Cent) * 60;
GPS->longitude_Second = (int)long_second_tmp;
speed_tmp = Get_Float_Number(&buf[GetComma(7, buf)]); //速度(单位:海里/时)
GPS->speed = speed_tmp * 1.85; //1海里=1.85公里
GPS->direction = Get_Float_Number(&buf[GetComma(8, buf)]); //角度
GPS->D.hour = (buf[7] - '0') * 10 + (buf[8] - '0'); //时间
GPS->D.minute = (buf[9] - '0') * 10 + (buf[10] - '0');
GPS->D.second = (buf[11] - '0') * 10 + (buf[12] - '0');
tmp = GetComma(9, buf);
GPS->D.day = (buf[tmp + 0] - '0') * 10 + (buf[tmp + 1] - '0'); //日期
GPS->D.month = (buf[tmp + 2] - '0') * 10 + (buf[tmp + 3] - '0');
GPS->D.year = (buf[tmp + 4] - '0') * 10 + (buf[tmp + 5] - '0') + 2000;
UTC2BTC(&GPS->D);
return 1;
}
}
return 0;
}
line是串口接收的一行数据buf
解出的GPS数据,即可送LCD显示,或 区域控制,报警。
参考文献:
原文链接:
https://blog.csdn.net/jwq2011/article/details/53674125


