介绍下工作环境,在算力较低的机器中希望将模型在计算棒中进行运算并输出结果,在这里用到了2棒运行yolov3
1下载文件
git clone https://github.com/rockchip-toybrick/yolov3_multiStick.git
2配置环境
1.先只插入一根计算棒,等待PC识别到计算棒
2参考Wiki中配置计算棒网络共享->Linux系统配置计算棒网络共享->Linux系统配置NAT功能,将网卡ip配置为192.168.180.2,注意这里不是192.168.180.1
 3登录计算棒,默认密码为toybrick
3登录计算棒,默认密码为toybrick
ssh toybrick@192.168.180.8
4修改登入ip和webgateway
4.1如果是rk1808SO
在计算棒中修改toybrick.conf配置,先转到根目录
sudo vi /etc/toybrick.conf
#将webip改为192.168.180.9
#将webgateway改为192.168.180.2
4.2如果是RK1808MO
修改方法
这里用了toybrick-set.py文件,这里首先搜索
sudo find -name toybrick-set.py
./usr/bin/toybrick-set.py
发现文件在此
执行文件

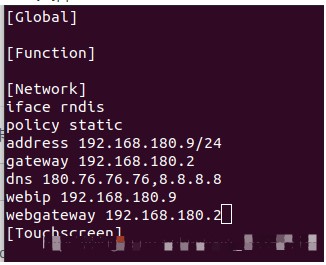
sudo toybrick-set.py network rndis static addr 192.168.180.9/24 gateway 192.168.180.2 dns 180.76.76.76,8.8.8.8 login 192.168.180.9/24
最后还是要区添加最后两行。。。。,上面只是生成了toybrick.conf文件
sudo reboot
 5 插入第二根计算棒,等待PC识别到计算棒,参考配置计算棒网络共享->Linux系统配置计算棒网络共享->Linux系统配置NAT功能,这里ip不需要改变,依然是192.168.180.1
6 执行以下命令配置路由,其中网卡名称需要改成用户本地实际值,用户可以执行ifconfig查看网卡名称,我这里第一个计算棒网卡名称为enx10dcb69f2f48, 第二个计算棒网卡名称为enx10dcb69f2fb7,配置路由后,拔插设备会失效,每次拔插设备都需要重新设置
5 插入第二根计算棒,等待PC识别到计算棒,参考配置计算棒网络共享->Linux系统配置计算棒网络共享->Linux系统配置NAT功能,这里ip不需要改变,依然是192.168.180.1
6 执行以下命令配置路由,其中网卡名称需要改成用户本地实际值,用户可以执行ifconfig查看网卡名称,我这里第一个计算棒网卡名称为enx10dcb69f2f48, 第二个计算棒网卡名称为enx10dcb69f2fb7,配置路由后,拔插设备会失效,每次拔插设备都需要重新设置
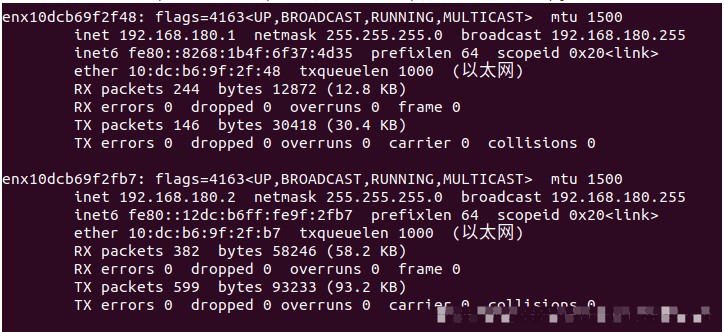
sudo route add -host 192.168.180.9 enx10dcb69f2fb7
sudo route add -host 192.168.180.8 enx10dcb69f2f48
此时ssh进入两根棒子发现是不同的棒子
 8 确保pip包版本相同
3配置网络功能
参考配置网络功能
3运行测试
1 . 插入u***摄像头
2 . 下载并解压代码
8 确保pip包版本相同
3配置网络功能
参考配置网络功能
3运行测试
1 . 插入u***摄像头
2 . 下载并解压代码
unzip master_yolov3_multiStick.zip
cd master_yolov3_multiStick/
3 . 拷贝代码到两个计算棒
这里需要修改代码,由于rk1808MO中是rknnlite包,所以修改
需要修改rk1808MO中程序
最快捷的方法是修改倒入包
#from rknn.api import RKNN
from rknnlite.api import RKNNLite as RKNN
scp -r 1808/ toybrick@192.168.180.9:/home/toybrick/
scp -r 1808/ toybrick@192.168.180.8:/home/toybrick/
4 . 新建两个终端,分别执行以下命令登录计算棒,默认密码为toybrick
ssh toybrick@192.168.180.9#登录第一个计算棒
ssh toybrick@192.168.180.8#登录到第二个计算棒
5.在两个计算棒上分别执行以下命令安装依赖
sudo pip install python3-opencv
6在两个计算棒上分别执行1808/程序
cd 1808/
python3 yolov3_server.py
- 确保PC端已安装numpy,opencv-python,在PC端执行
cd host/
python3 rknn_camera.py
测试下来一根棒子稳定7fps。两根在14-15间来回跳动
介绍下工作环境,在算力较低的机器中希望将模型在计算棒中进行运算并输出结果,在这里用到了2棒运行yolov3
1下载文件
git clone https://github.com/rockchip-toybrick/yolov3_multiStick.git
2配置环境
1.先只插入一根计算棒,等待PC识别到计算棒
2参考Wiki中配置计算棒网络共享->Linux系统配置计算棒网络共享->Linux系统配置NAT功能,将网卡ip配置为192.168.180.2,注意这里不是192.168.180.1
3登录计算棒,默认密码为toybrick
ssh toybrick@192.168.180.8
4修改登入ip和webgateway
4.1如果是rk1808SO
在计算棒中修改toybrick.conf配置,先转到根目录
sudo vi /etc/toybrick.conf
#将webip改为192.168.180.9
#将webgateway改为192.168.180.2
4.2如果是RK1808MO
修改方法
这里用了toybrick-set.py文件,这里首先搜索
sudo find -name toybrick-set.py
./usr/bin/toybrick-set.py
发现文件在此
执行文件
sudo toybrick-set.py network rndis static addr 192.168.180.9/24 gateway 192.168.180.2 dns 180.76.76.76,8.8.8.8 login 192.168.180.9/24
最后还是要区添加最后两行。。。。,上面只是生成了toybrick.conf文件
sudo reboot
5 插入第二根计算棒,等待PC识别到计算棒,参考配置计算棒网络共享->Linux系统配置计算棒网络共享->Linux系统配置NAT功能,这里ip不需要改变,依然是192.168.180.1
6 执行以下命令配置路由,其中网卡名称需要改成用户本地实际值,用户可以执行ifconfig查看网卡名称,我这里第一个计算棒网卡名称为enx10dcb69f2f48, 第二个计算棒网卡名称为enx10dcb69f2fb7,配置路由后,拔插设备会失效,每次拔插设备都需要重新设置
sudo route add -host 192.168.180.9 enx10dcb69f2fb7
sudo route add -host 192.168.180.8 enx10dcb69f2f48
此时ssh进入两根棒子发现是不同的棒子
8 确保pip包版本相同
3配置网络功能
参考配置网络功能
3运行测试
1 . 插入u***摄像头
2 . 下载并解压代码
unzip master_yolov3_multiStick.zip
cd master_yolov3_multiStick/
3 . 拷贝代码到两个计算棒
这里需要修改代码,由于rk1808MO中是rknnlite包,所以修改
需要修改rk1808MO中程序
最快捷的方法是修改倒入包
#from rknn.api import RKNN
from rknnlite.api import RKNNLite as RKNN
scp -r 1808/ toybrick@192.168.180.9:/home/toybrick/
scp -r 1808/ toybrick@192.168.180.8:/home/toybrick/
4 . 新建两个终端,分别执行以下命令登录计算棒,默认密码为toybrick
ssh toybrick@192.168.180.9#登录第一个计算棒
ssh toybrick@192.168.180.8#登录到第二个计算棒
5.在两个计算棒上分别执行以下命令安装依赖
sudo pip install python3-opencv
6在两个计算棒上分别执行1808/程序
cd 1808/
python3 yolov3_server.py
- 确保PC端已安装numpy,opencv-python,在PC端执行
cd host/
python3 rknn_camera.py
测试下来一根棒子稳定7fps。两根在14-15间来回跳动

 举报
举报




