一、cubmx的配置
配置如图:
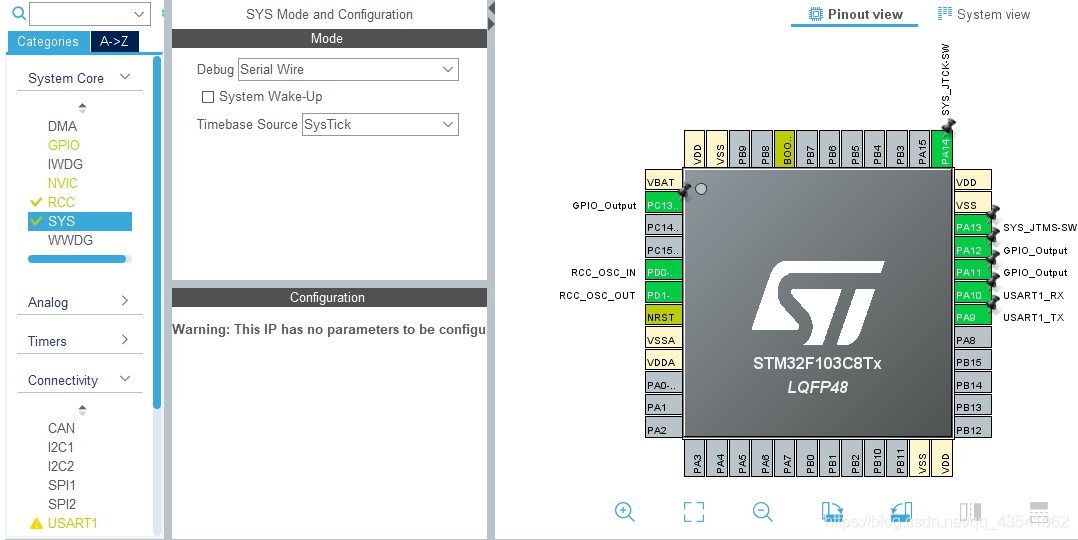 PA11、12是任选的两个作为i2c通信的管脚。
stm32上的绿灯是我们可以编程控制的,如果想要控制它就要查找板子的原理图,把对应灯连接的管脚使能设置为输出,查询可知为PC13。
同时应注意,STM32单片机使用SWD(Serial wire debug)模式下载程序时要配置sys中的Serial wire。
之后生成代码即可。
二、代码讲解
传感器驱动文件
myiic.c、myicc.h、vl6180.c、vl6180.h为传感器的驱动文件,可以在网络上找到,将其添加到cubmx生成的工程中,进行相应的修改即可。
代码里的内容可以参考b站正点原子关于i2c的讲解类比。
代码中一般在函数的上方和旁边都会有相应的注释,可通过它们大致了解函数的功能。选中函数go to definition可进一步深入。
main.c文件
下面是while(1)的内容。
PA11、12是任选的两个作为i2c通信的管脚。
stm32上的绿灯是我们可以编程控制的,如果想要控制它就要查找板子的原理图,把对应灯连接的管脚使能设置为输出,查询可知为PC13。
同时应注意,STM32单片机使用SWD(Serial wire debug)模式下载程序时要配置sys中的Serial wire。
之后生成代码即可。
二、代码讲解
传感器驱动文件
myiic.c、myicc.h、vl6180.c、vl6180.h为传感器的驱动文件,可以在网络上找到,将其添加到cubmx生成的工程中,进行相应的修改即可。
代码里的内容可以参考b站正点原子关于i2c的讲解类比。
代码中一般在函数的上方和旁边都会有相应的注释,可通过它们大致了解函数的功能。选中函数go to definition可进一步深入。
main.c文件
下面是while(1)的内容。
while (1)
{
if(TimerCnt100ms > 100)
{
TimerCnt100ms=0;
// /* Wait for device ready. */
// do
// {
// status = ReadByte(0x004D);
// } while ((status & (1 << 0)) == 0);
/*Start Single measure mode*/
VL6180X_Start_Range();
/* Wait for measurement ready. */
VL6180X_Poll_Range();
HAL_Delay(100);
/*read range result (mm)*/
distance = VL6180_Read_Range();
distance_ascii[0] = (distance/1000)%10 + '0';
distance_ascii[1] = (distance/100)%10 + '0';
distance_ascii[2] = (distance/10)%10 + '0';
distance_ascii[3] = distance%10 + '0';
HAL_UART_Transmit(&huart1,Text1,12,0Xffff);
HAL_UART_Transmit(&huart1,distance_ascii,4,0Xffff);
HAL_UART_Transmit(&huart1,Text2,4,0Xffff);
}
// HAL_Delay(500000);
if(TimerCnt500ms > 500)
{
TimerCnt500ms=0;
HAL_GPIO_TogglePin(GPIOC, GPIO_PIN_13);
}
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
(1)其中没有用定时器计时,而是定义了TimerCnt100ms这个变量,用滴答定时器中断,1ms中断一次,从而实现1ms把 TimerCnt100ms加一。 TimerCnt100ms和TimerCnt500ms++独立计时,互不影响。
void SysTick_Handler(void)
{
/* USER CODE BEGIN SysTick_IRQn 0 */
TimerCnt100ms++;
TimerCnt500ms++;
/* USER CODE END SysTick_IRQn 0 */
HAL_IncTick();
/* USER CODE BEGIN SysTick_IRQn 1 */
/* USER CODE END SysTick_IRQn 1 */
}
(2)关于distance_ascii[0] = (distance/1000)%10 + ‘0’;
可以看出是取了distance的千位,加‘0’是因为上位机看到的是ASCII码,对照ASCII码表可知,要将数字转换为ASCII码要加48,即加 ‘0’。
(3)关于HAL_UART_Transmit函数
HAL_StatusTypeDef HAL_UART_Transmit(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size, uint32_t Timeout)
第二个参数是要传输的数据,第三个参数是传输数据的位数。
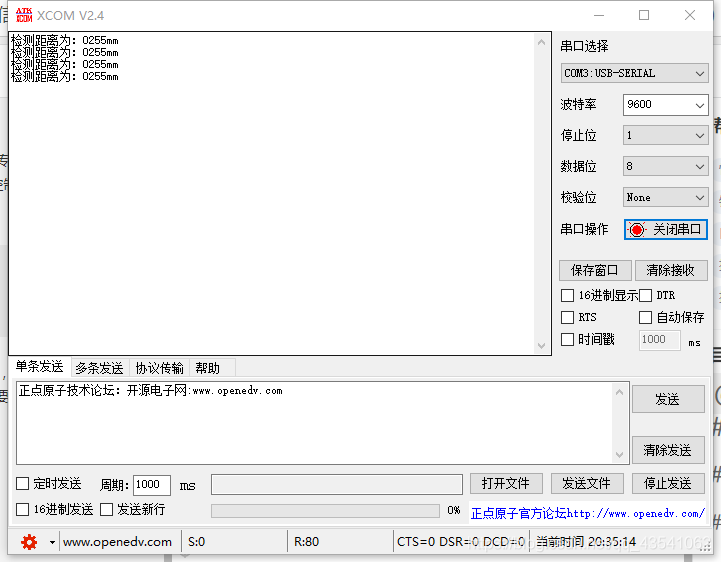
三、实操
下载代码后,根据上一篇文章(一)的讲解把传感器和核心板和USB转TTL连接好。将USB转TTL插入电脑,打开控制面板中的设备管理器会发现插入的设备串口,我的是com3.
 之后打开串口调试助手,选择com3,打开串口,可以看到串口能够事实收到检测的距离。(注意实物的通信不需要用虚拟串口工具,vspd虚拟串口的串口需要删除)
之后打开串口调试助手,选择com3,打开串口,可以看到串口能够事实收到检测的距离。(注意实物的通信不需要用虚拟串口工具,vspd虚拟串口的串口需要删除)
一、cubmx的配置
配置如图:
PA11、12是任选的两个作为i2c通信的管脚。
stm32上的绿灯是我们可以编程控制的,如果想要控制它就要查找板子的原理图,把对应灯连接的管脚使能设置为输出,查询可知为PC13。
同时应注意,STM32单片机使用SWD(Serial wire debug)模式下载程序时要配置sys中的Serial wire。
之后生成代码即可。
二、代码讲解
传感器驱动文件
myiic.c、myicc.h、vl6180.c、vl6180.h为传感器的驱动文件,可以在网络上找到,将其添加到cubmx生成的工程中,进行相应的修改即可。
代码里的内容可以参考b站正点原子关于i2c的讲解类比。
代码中一般在函数的上方和旁边都会有相应的注释,可通过它们大致了解函数的功能。选中函数go to definition可进一步深入。
main.c文件
下面是while(1)的内容。
while (1)
{
if(TimerCnt100ms > 100)
{
TimerCnt100ms=0;
// /* Wait for device ready. */
// do
// {
// status = ReadByte(0x004D);
// } while ((status & (1 << 0)) == 0);
/*Start Single measure mode*/
VL6180X_Start_Range();
/* Wait for measurement ready. */
VL6180X_Poll_Range();
HAL_Delay(100);
/*read range result (mm)*/
distance = VL6180_Read_Range();
distance_ascii[0] = (distance/1000)%10 + '0';
distance_ascii[1] = (distance/100)%10 + '0';
distance_ascii[2] = (distance/10)%10 + '0';
distance_ascii[3] = distance%10 + '0';
HAL_UART_Transmit(&huart1,Text1,12,0Xffff);
HAL_UART_Transmit(&huart1,distance_ascii,4,0Xffff);
HAL_UART_Transmit(&huart1,Text2,4,0Xffff);
}
// HAL_Delay(500000);
if(TimerCnt500ms > 500)
{
TimerCnt500ms=0;
HAL_GPIO_TogglePin(GPIOC, GPIO_PIN_13);
}
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
(1)其中没有用定时器计时,而是定义了TimerCnt100ms这个变量,用滴答定时器中断,1ms中断一次,从而实现1ms把 TimerCnt100ms加一。 TimerCnt100ms和TimerCnt500ms++独立计时,互不影响。
void SysTick_Handler(void)
{
/* USER CODE BEGIN SysTick_IRQn 0 */
TimerCnt100ms++;
TimerCnt500ms++;
/* USER CODE END SysTick_IRQn 0 */
HAL_IncTick();
/* USER CODE BEGIN SysTick_IRQn 1 */
/* USER CODE END SysTick_IRQn 1 */
}
(2)关于distance_ascii[0] = (distance/1000)%10 + ‘0’;
可以看出是取了distance的千位,加‘0’是因为上位机看到的是ASCII码,对照ASCII码表可知,要将数字转换为ASCII码要加48,即加 ‘0’。
(3)关于HAL_UART_Transmit函数
HAL_StatusTypeDef HAL_UART_Transmit(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size, uint32_t Timeout)
第二个参数是要传输的数据,第三个参数是传输数据的位数。
三、实操
下载代码后,根据上一篇文章(一)的讲解把传感器和核心板和USB转TTL连接好。将USB转TTL插入电脑,打开控制面板中的设备管理器会发现插入的设备串口,我的是com3.
之后打开串口调试助手,选择com3,打开串口,可以看到串口能够事实收到检测的距离。(注意实物的通信不需要用虚拟串口工具,vspd虚拟串口的串口需要删除)

 举报
举报




