一、查找到的资料
1.相关视频
(1)用遥控控制舵机
可以实现姿态角对舵机的控制,也可以实现遥控对舵机的控制
(2)良心博主的培训课(包含所有课件的PPT和代码)
包含有步进电机驱动、MPU6050、红外传感器、蓝牙APP、舵机、焊接注意事项
(3)其他
内含有STM32F103舵机驱动程序
二.学习经验总结
1.航模电机(外转子无刷直流电机或者空心杯电机)的介绍
(1)电机选择时的注意事项
航模电机常常指的是外转子无刷直流电机(大四轴无人机),当然也有空心杯电机(小四轴无人机)和180电机(微型直升机航模)。

(2)电调的选型(暂时不用)
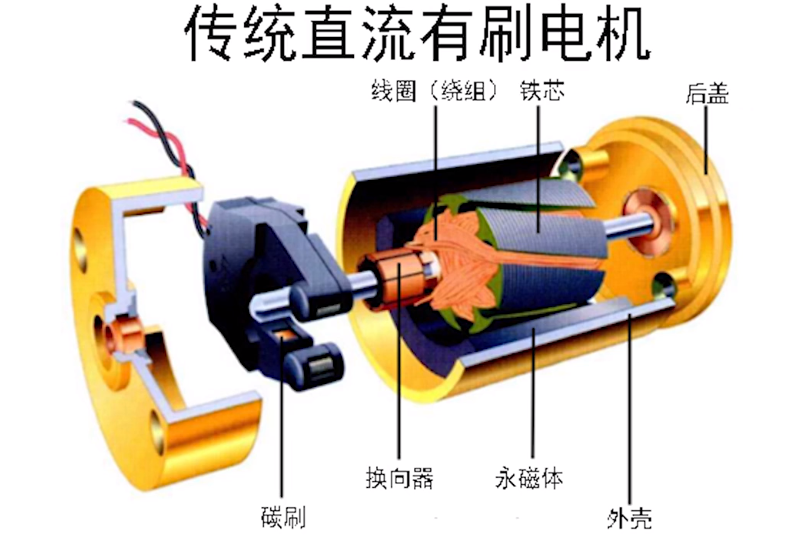
(3)空心杯电机的特点
和传统的直流有刷电机相比,空心杯电机最大的特点就是线圈,并且体积较小,一般空心杯电机的功率只有几百w,可以应用到快速响应的系统中(例如,仿生翼)
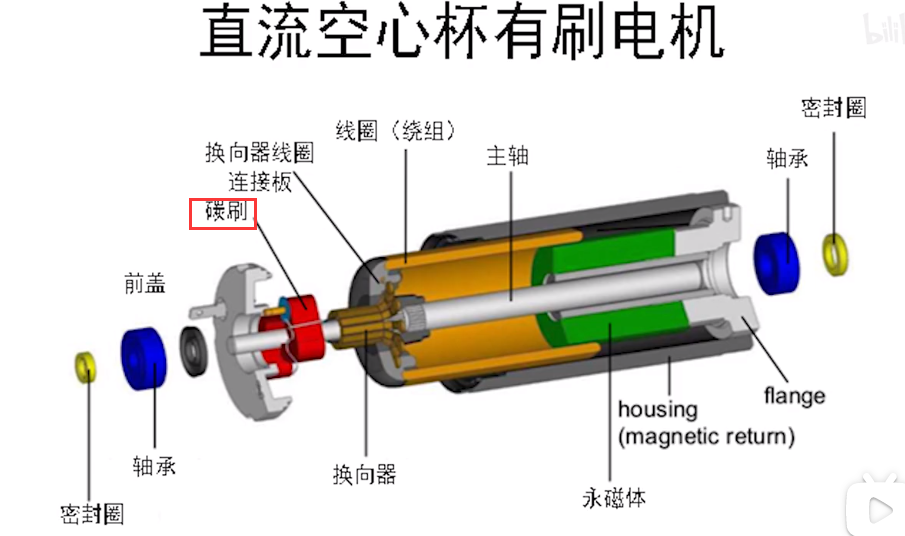
(4)空心杯电机的选型
具体包含各种空心杯电机的长度、housing直径、外伸轴的直径。
注意:电机驱动部分,如果使用有刷电机(内部含有碳刷),驱动起来就比较简单,使用自己设计的MOS管电路(Crazepony)就可以。而如果是无刷的话那就需要电调(电子调速计)。
2.舵机的组成
(1)普通舵机
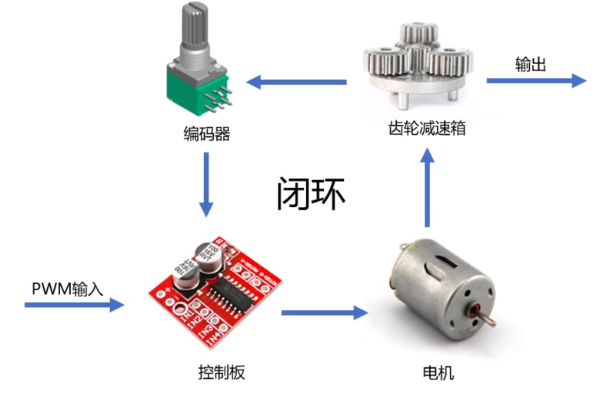
舵机是由一个普通的直流电机、齿轮减速器、编码器(旋转电阻)、一款控制板(控制电路)
(2)360度舵机(普通舵机-编码器)
3.舵机控制原理
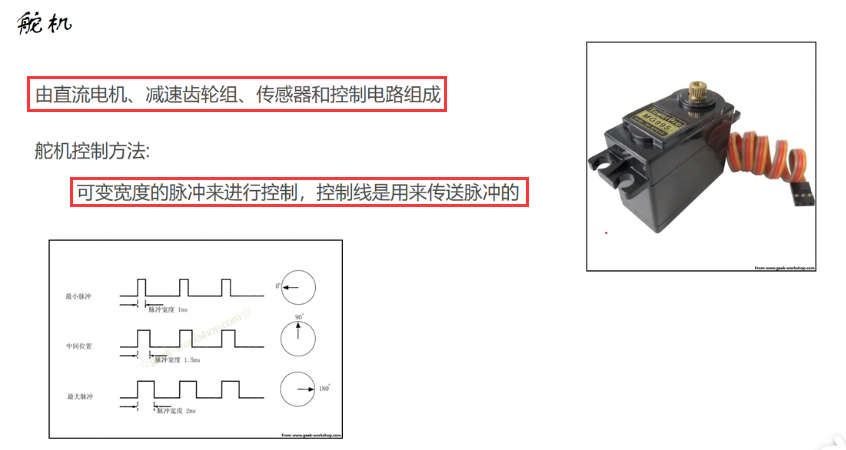

(1)电机和舵机的程序驱动相同,但是表现形式不同
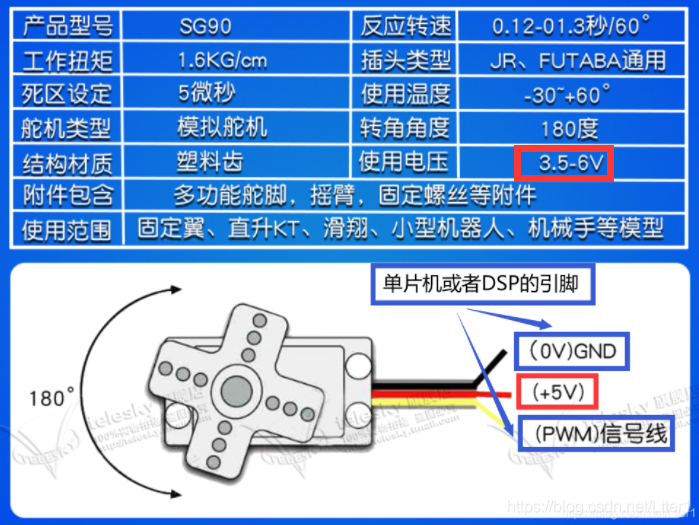
电机相较于舵机的话,程序层面都是一样的,只不过电机会多一个电机驱动模块(常见L298N用于升压)。但是表现形式不同,即通过控制PWM,可以控制电机的转速。而对于舵机而言,PWM控制其相应的转角。具体的定时器设置周期都是20ms,相应的线路连接和角度设置如下图所示:
值得一提的是,因为舵机驱动的程序是在定时器的基础上写的,因此黄s接到定时器的IO口上。并且STM32有11个定时器。

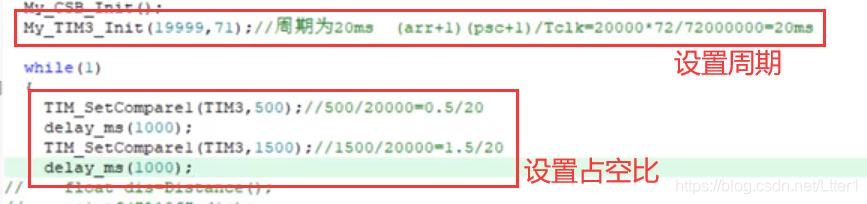
(2)舵机的驱动程序(定时器中断)
具体的程序涉及到对通用GPIO的设置、定时器和定时器通道的设置。需要改的地方就是周期和占空比(和相应的旋转角度有关,如上图)。当程序制定相应的占空比,舵机会默认转到内部元器件设置的角度!
(3)舵机转速控制的原理(是否加延迟)
舵机的转动速度取决于起始角度和目标角度的差,差别越大转得越快,当接近时就放慢角度。所以没有专门的函数控制转速。但在大角度转动时,你可以用程序把它设成几个小角度递进,这样可以放慢速度。
(5)舵机检测装置(舵机测试仪)
(6)高电压电机驱动模块(L298N)
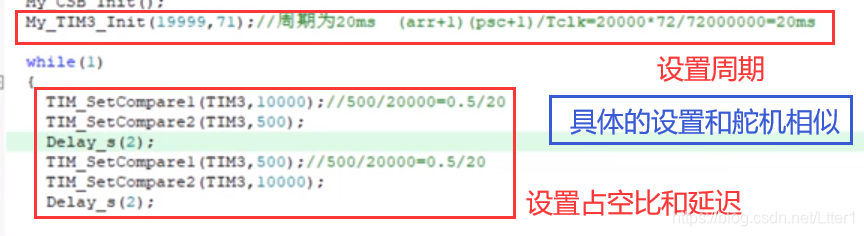
电机驱动往往需要两路PWM,通过改变两路占空比来控制电机的正反转。可以承受2A的电流,市面上耐电流比较大的;可以一次性控制两个电机,如果想要让电机转快点,就改变占空比(对于舵机而言,是控制相应的角度)
(7)电机驱动的实质:
单片机的电压往往是3.3V,如果要用该电压驱动电机的话,是驱动不起来的!所以电机驱动就是升压的作用
(8)舵机的驱动电路
一般来讲,舵机不需要特别的驱动电路,因为舵机内部已经有驱动电路了,一般单片机IO口输出的PWM波都可以驱动舵机。
(9)遥控-MPU6050-舵机
含有开源程序
用STM32战舰V3驱动的舵机(可以到正点原子官方论坛找资料)
(9)其他
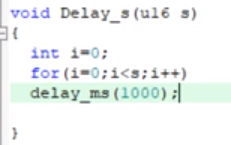
计数器计数的话,要注意上限。比如STM32中,当需要延迟2s的时候,delay_ms(2000)不会到达两秒,会溢出。因此,最好还是自己新写一个延迟函数。如下图所示,是在延迟毫秒函数delay_ms()的基础上写的延迟秒delay_s()。
 4.舵机的型号选择
其中比较详细地介绍了拉角方式的选择(辣椒钢丝等)
4.舵机的型号选择
其中比较详细地介绍了拉角方式的选择(辣椒钢丝等)
(1)常见型号SG90
(2)SG90的升级版MG90(金属齿轮)
(3)MG996
一、查找到的资料
1.相关视频
(1)用遥控控制舵机
可以实现姿态角对舵机的控制,也可以实现遥控对舵机的控制
(2)良心博主的培训课(包含所有课件的PPT和代码)
包含有步进电机驱动、MPU6050、红外传感器、蓝牙APP、舵机、焊接注意事项
(3)其他
内含有STM32F103舵机驱动程序
二.学习经验总结
1.航模电机(外转子无刷直流电机或者空心杯电机)的介绍
(1)电机选择时的注意事项
航模电机常常指的是外转子无刷直流电机(大四轴无人机),当然也有空心杯电机(小四轴无人机)和180电机(微型直升机航模)。
(2)电调的选型(暂时不用)
(3)空心杯电机的特点
和传统的直流有刷电机相比,空心杯电机最大的特点就是线圈,并且体积较小,一般空心杯电机的功率只有几百w,可以应用到快速响应的系统中(例如,仿生翼)
(4)空心杯电机的选型
具体包含各种空心杯电机的长度、housing直径、外伸轴的直径。
注意:电机驱动部分,如果使用有刷电机(内部含有碳刷),驱动起来就比较简单,使用自己设计的MOS管电路(Crazepony)就可以。而如果是无刷的话那就需要电调(电子调速计)。
2.舵机的组成
(1)普通舵机
舵机是由一个普通的直流电机、齿轮减速器、编码器(旋转电阻)、一款控制板(控制电路)
(2)360度舵机(普通舵机-编码器)
3.舵机控制原理
(1)电机和舵机的程序驱动相同,但是表现形式不同
电机相较于舵机的话,程序层面都是一样的,只不过电机会多一个电机驱动模块(常见L298N用于升压)。但是表现形式不同,即通过控制PWM,可以控制电机的转速。而对于舵机而言,PWM控制其相应的转角。具体的定时器设置周期都是20ms,相应的线路连接和角度设置如下图所示:
值得一提的是,因为舵机驱动的程序是在定时器的基础上写的,因此黄s接到定时器的IO口上。并且STM32有11个定时器。
(2)舵机的驱动程序(定时器中断)
具体的程序涉及到对通用GPIO的设置、定时器和定时器通道的设置。需要改的地方就是周期和占空比(和相应的旋转角度有关,如上图)。当程序制定相应的占空比,舵机会默认转到内部元器件设置的角度!
(3)舵机转速控制的原理(是否加延迟)
舵机的转动速度取决于起始角度和目标角度的差,差别越大转得越快,当接近时就放慢角度。所以没有专门的函数控制转速。但在大角度转动时,你可以用程序把它设成几个小角度递进,这样可以放慢速度。
(5)舵机检测装置(舵机测试仪)
(6)高电压电机驱动模块(L298N)
电机驱动往往需要两路PWM,通过改变两路占空比来控制电机的正反转。可以承受2A的电流,市面上耐电流比较大的;可以一次性控制两个电机,如果想要让电机转快点,就改变占空比(对于舵机而言,是控制相应的角度)
(7)电机驱动的实质:
单片机的电压往往是3.3V,如果要用该电压驱动电机的话,是驱动不起来的!所以电机驱动就是升压的作用
(8)舵机的驱动电路
一般来讲,舵机不需要特别的驱动电路,因为舵机内部已经有驱动电路了,一般单片机IO口输出的PWM波都可以驱动舵机。
(9)遥控-MPU6050-舵机
含有开源程序
用STM32战舰V3驱动的舵机(可以到正点原子官方论坛找资料)
(9)其他
计数器计数的话,要注意上限。比如STM32中,当需要延迟2s的时候,delay_ms(2000)不会到达两秒,会溢出。因此,最好还是自己新写一个延迟函数。如下图所示,是在延迟毫秒函数delay_ms()的基础上写的延迟秒delay_s()。
4.舵机的型号选择
其中比较详细地介绍了拉角方式的选择(辣椒钢丝等)
(1)常见型号SG90
(2)SG90的升级版MG90(金属齿轮)
(3)MG996

 举报
举报




